

3.8 Запитання для самоперевірки
-
Яка величина є критерієм нерівномірності ходу для періоду усталеного руху?
-
Методи регулювання руху машин. Призначення маховика.
-
Зведений момент (сила). Умова зведення.
-
Зведений момент інерції (зведена маса). Умова зведення.
-
Періоди руху машини. Їх характеристики.
-
Рівняння руху машини (в інтегральній та диференціальній формі).
-
Як визначити кінетичну енергію окремих ланок та всього механізму?
-
Як визначається момент інерції твердого тіла? Одиниці вимірювання.
-
Причини нерівномірності ходу машин.
-
Види коливань швидкості руху вхідної ланки механізму.
-
Коефіцієнт нерівномірності руху машини.
-
Що трапиться, якщо взяти момент інерції маховика більше розрахованого?
-
Задачі і методи регулювання ходу машини.
-
Принцип дії маховика і регулятора швидкості. В яких випадках доцільно їх використовувати?
-
Як визначити необхідний момент інерції маховика?
-
Як зміниться нерівномірність руху механізму, якщо маховик з моментом інерції ІМ переставити з тихохідного на швидкохідний вал машини?
-
Вплив маси і сили ваги ланок механізму на зміну кутової швидкості ведучої ланки.
-
Як визначити дійсну кутову швидкість маховика в будь-якому положенні механізму?
-
Вибір розмірів маховика.
-
На якому валу доцільно встановити маховик?
4 Синтез кулачкових механізмів
Задача синтезу кулачкових механізмів складається із двох етапів: динамічного синтезу – визначення геометричних параметрів (мінімальних розмірів кулачка) та кінематичного синтезу – побудова профілю кулачка за наперед заданим законом руху вихідної ланки при відомій схемі кулачкового механізму.
4.1 Загальні відомості про кулачкові механізми. Основні визначення
Кулачковим називають механізм до складу якого входять три основні ланки : кулачок, штовхач та стояк. Кулачок це ланка механізму зі складною формою робочої поверхні, елемент вищої кінематичної пари якої має змінну кривизну і входить в рухомий контакт зі штовхачем.
Штовхач – ланка кулачкового механізму, що взаємодіє з робочою поверхнею кулачка своїм наконечником, який за формою може бути гострокінцевим, плоским, роликовим і здійснює поступальний або обертальний рух.
В цих механізмах кулачок є вхідною ланкою, а штовхач вихідною. Кулачкові механізми розділяють за видами руху вхідної і вихідної ланок, способами замикання вищої пари, видами елементів вищої пари, видами вхідної і вихідної ланок і т.д. Детальніше про типи та класифікацію кулачкових механізмів розглянуто в посібнику [8].
В курсовому проекті виконується синтез
трьох основних типів кулачкових
механізмів: штангового роликового
(рисунок 4.1,а), коромислового ( рисунок
4.1,б), тарілчастого ( рисунок 4.1,в).
курсовому проекті виконується синтез
трьох основних типів кулачкових
механізмів: штангового роликового
(рисунок 4.1,а), коромислового ( рисунок
4.1,б), тарілчастого ( рисунок 4.1,в).
Рисунок 4.1 – Основні типи кулачкових механізмів
Вихідна ланка штангового і тарілчастого кулачкового механізму здійснює зворотно-поступальний рух.
Для зменшення зносу поверхні кулачка та втрати на тертя на наконечнику штовхача встановлюють ролик. Тоді при проектуванні кулачкового механізму розрізняють теоретичний (центровий) і робочий (конструктивний) профіль кулачка (рисунок 4.2).
Центровий профіль являє собою траєкторію центра ролика на штовхачі відносно конструктивного профілю кулачка.
За час одного оберту кулачка виділяються
такі фази руху вихідної ланки:
віддалення, вистій при максимальному
віддаленні – дальній вистій,
наближення, вистій при мінімальному
наближенні до осі кулачка. Кожній з цих
фаз відповідає певний кут повороту
кулачка:
![]() ,
,
![]() ,
,![]() ,
,
![]() .
Робочий кут профілю дорівнює сумі
перших трьох фаз:
.
Робочий кут профілю дорівнює сумі
перших трьох фаз:
![]() .
(4.1)
.
(4.1)
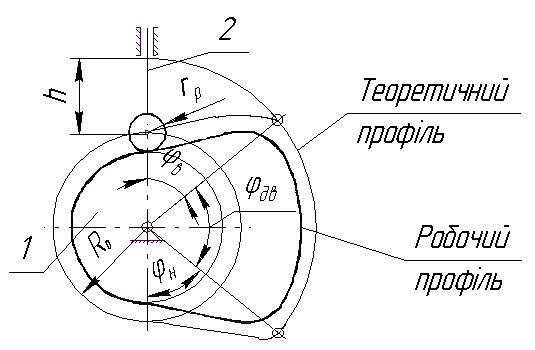
Рисунок 4.2 – Основні елементи та параметри кулачкового механізму