

3 Визначення моменту інерції та розмірів маховика
3.1 Динамічна модель машинного агрегату
Механізм машинного агрегату звичайно – багатоланкова система, що навантажена силами і моментами сил, прикладеними до різних її ланок.
Я к
приклад розглянемо кривошипно повзунний
механізм (рисунок 3.1).
к
приклад розглянемо кривошипно повзунний
механізм (рисунок 3.1).
До повзуна 3 прикладена сила корисного опору Fко. Від двигуна до кривошипа передається рушійний момент Мр. Крім того, до всіх ланок механізму прикладені сили ваги.
Динамічне дослідження багатоланкової системи – складна задача. Оскільки даний механізм має один ступінь вільності (W = 1), то при динамічному дослідженні достатньо визначити кінематичні характеристики однієї ланки.
Як правило, за динамічну модель механізму приймають основу механізму (ведуча ланка з стояком – рисунок 3.1,б) і визначають такі її динамічні параметри, при яких вона буде еквівалентна в динамічному відношенні досліджуваному.
Ланка, до якої зводяться динамічні параметри системи, називається ланкою зведення. При дослідженні важільних механізмів ланкою зведення частіше служить кривошип, кутова швидкість якого приймається постійною.
Щоб зберегти зазор руху динамічної моделі тотожним закону руху механізму, ланка зведення повинна мати такі зведені параметри, дія яких еквівалентна дії всіх параметрів механізму.
3.2 Визначення зведених моментів
Зведеним моментом будь-яких сил і моментів (рушійних, опору чи сил ваги) називають такий умовний момент, який , будучи прикладеним до ланки зведення, розвиватиме миттєву потужність, рівну алгебраїчній сумі потужностей всіх сил і моментів, які зводяться. Найчастіше за ланку зведення приймають вхідну ланку 1. Зведений момент визначається за формулою
![]() ,
(3.1)
,
(3.1)
де Fi
– модуль сили, що зводиться;
![]() – модуль швидкості точки ланки, до якої
прикладена сила Fi;
і – кут між
векторами Fi
і
– модуль швидкості точки ланки, до якої
прикладена сила Fi;
і – кут між
векторами Fi
і
![]() ;
m – загальна кількість
сили; Мj – алгебраїчна
величина моменту, прикладеного до J-
ої ланки;
;
m – загальна кількість
сили; Мj – алгебраїчна
величина моменту, прикладеного до J-
ої ланки;
![]() -
кутова швидкість J-ої
ланки;
-
кутова швидкість J-ої
ланки;
![]() -
кутова швидкість ланки зведення (вхідної
ланки 1).
-
кутова швидкість ланки зведення (вхідної
ланки 1).
У
дальнішому зведений момент рушійних
сил (моментів) позначаємо
![]() ,а зведений момент сил (моментів) опору
,а зведений момент сил (моментів) опору
![]() .
.
Зведений
момент
![]() можна
визначити за допомогою важеля Жуковського.
Враховуючи, що робота зведеного моменту
сил дорівнює сумі робіт всіх зовнішніх
сил, що діють на ланки механізму, то це
дає нам право прирівняти роботу сили
рушійної роботі всіх зовнішніх сил
можна
визначити за допомогою важеля Жуковського.
Враховуючи, що робота зведеного моменту
сил дорівнює сумі робіт всіх зовнішніх
сил, що діють на ланки механізму, то це
дає нам право прирівняти роботу сили
рушійної роботі всіх зовнішніх сил
![]() .
.
Зрівноважувальну силу за методом “жорсткого” важеля Жуковського можна визначити в такій послідовності:
1. На планах швидкостей визначаємо точки, відповідні точкам прикладених до ланок механізму сил (сил корисного опору FКО або рушійних FРта сил ваги GJ).
2.
На плани швидкостей у відповідні точки
наносимо вектор зазначених вище сил,
повернутих на 90 градусів в одному
напрямку, і складаємо рівняння рівноваги
відносно полюса (розглядаємо його як
“жорсткий” важіль швидкостей у формі
![]() .
Зрівноважувальну силу FЗР
прикладаємо перпендикулярно ведучій
ланці. Знаючи зрівноважувальну силу,
розраховуємо зрівноважувальний момент
.
Зрівноважувальну силу FЗР
прикладаємо перпендикулярно ведучій
ланці. Знаючи зрівноважувальну силу,
розраховуємо зрівноважувальний момент
![]() . (3.2)
. (3.2)
Зведений момент МЗВ можна визначити також графоаналітичним методом, використовуючи знову ж план швидкостей.
Як приклад, розглянемо визначення зведеного моменту МЗВ аналітично з використанням плану швидкостей кривошипно – повзунного механізму (рисунок 3.2)
Рисунок 3.2 – Кривошипно - повзунний
механізм: а – план механізму;
б – план швидкостей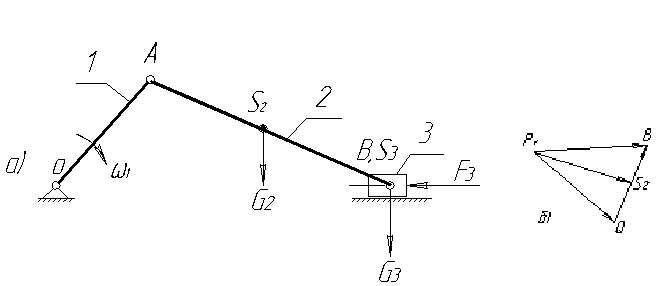
На рисунку 3.2,а зображено кінематичну схему в одному його положенні. Відома сила корисного опору F3 (яку отримали з графіка сил або індикаторної діаграми) і сили ваги ланок G2 і G3. Точки S2, S3 – центри мас ланок. На рисунку 3.2,б викреслено план швидкостей.
Користуючись формулою (3.1)і планом швидкостей, можна записати
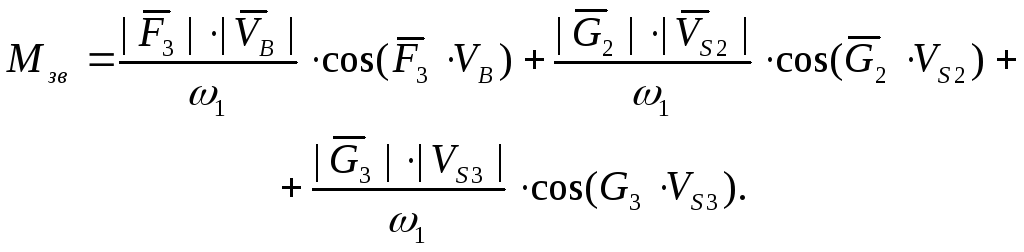 (3.3)
(3.3)
Складові, що входять до формули (3.3) є величинами алгебраїчними і їх знак визначається величиною кутів між векторами сил і векторами швидкостей (якщо cos (F3,VB)=1, то F30 і якщо cos (F3,VB)=-1, то F3 0).