

2.2.2 Побудова планів швидкостей і прискорень
Графоаналітичний метод (метод планів швидкостей і прискорень) дає можливість визначити лінійні швидкості і прискорення всіх точок механізму, кутові швидкості і прискорення всіх ланок механізму в заданому його положенні.
Планом швидкостей (прискорень) механізму називають графічне зображення у вигляді відрізків, що відповідають за модулем і за напрямком швидкостям (прискоренням) різних точок ланок механізму в дану мить часу.
В курсовому проекті кінематичне дослідження виконується графоаналітичним методом для контрольних положень механізму (12 планів швидкостей та 1 план прискорень), а також аналітичним методом.
Для побудови планів швидкостей і прискорень попередньо нагадаємо деякі положення кінематики плоского руху абсолютно твердого тіла, які вивчаються в курсі теоретичної механіки.
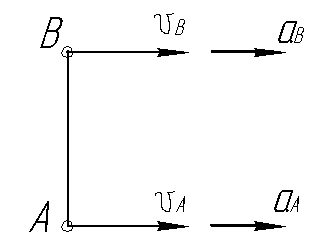
Якщо тіло здійснює поступальний рух (рисунок 2.6 а), то швидкості а також і прискорення двох будь-яких довільних точок рівні між собою
![]() ;
;
![]()
а) б)
Рисунок 2.6. – Кінематика поступального (а) і обертального (б) руху тіл
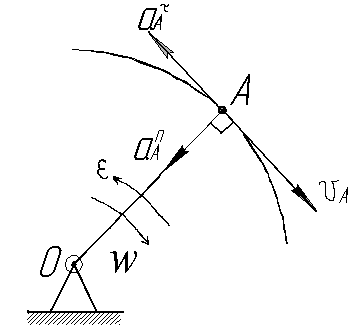
Якщо тіло здійснює обертальний рух навколо нерухомої точки О (рисунок 2.6, б), то швидкість точки А дорівнює:
![]() (м/с), (2.2.1)
(м/с), (2.2.1)
де
![]() - кутова швидкість тіла в с-1;
- кутова швидкість тіла в с-1;
lOA – віддаль між точками О і А в метрах. Вектор VA напрямлений по дотичній до кола (перпендикулярно до прямої ОА) в напрямку кутової швидкості тіла.
Прискорення точки А при обертальному русі визначається як векторна сума:
![]() ,
(2.2.2)
,
(2.2.2)
де
![]() - нормальне (доцентрове) прискорення;
- нормальне (доцентрове) прискорення;
![]() -
тангенціальне (дотичне) прискорення.
-
тангенціальне (дотичне) прискорення.
Нормальне прискорення визначається за формулою:
![]() (м/с2).
(2.2.3)
(м/с2).
(2.2.3)
Напрямлене
нормальне прискорення
![]() до центра обертання, від точки А до точки
О вздовж прямої ОА. Тангенціальне
прискорення дорівнює
до центра обертання, від точки А до точки
О вздовж прямої ОА. Тангенціальне
прискорення дорівнює
![]() (м/с2),
(2.2.4)
(м/с2),
(2.2.4)
де
![]() - кутове прискорення тіла в с-2.
- кутове прискорення тіла в с-2.
Якщо
тіло здійснює обертальний рух з постійною
кутовою швидкістю (![]() =const),
то
=const),
то
![]() і
і
![]() =0,
=0,
тоді
![]() .
(2.2.5)
.
(2.2.5)
У
випадку коли тіло здійснює плоско-паралельний
рух, то такий складний рух тіла можна
розкласти на два рухи – переносний
поступальний з довільно вибраною точкою
і відносний обертальний навколо цієї
точки. Тоді швидкість
![]() довільної точки В тіла (рисунок 2.7) буде
дорівнювати сумі швидкостей вказаних
двох рухів
довільної точки В тіла (рисунок 2.7) буде
дорівнювати сумі швидкостей вказаних
двох рухів
![]() ,
(2.2.6)
,
(2.2.6)
де
![]() - швидкість переносного руху точки А;
- швидкість переносного руху точки А;
![]() - швидкість точки В в обертальному русі
тіла навколо точки А. Значення цієї
швидкості дорівнює
- швидкість точки В в обертальному русі
тіла навколо точки А. Значення цієї
швидкості дорівнює
![]() (м/с),
(2.2.7)
(м/с),
(2.2.7)
де
![]() –
кутова швидкість тіла в с-1;
–
кутова швидкість тіла в с-1;
![]() – віддаль
між точками А і В в метрах. Вектор
– віддаль
між точками А і В в метрах. Вектор
![]() напрямлений перпендикулярно до прямої
АВ.
напрямлений перпендикулярно до прямої
АВ.
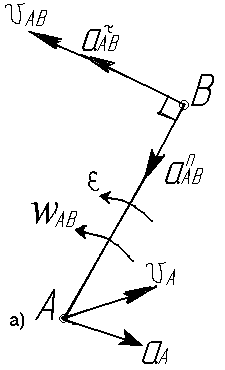
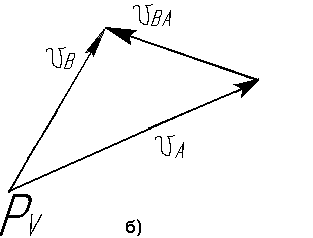

Рисунок 2.7 – Кінематика плоско-паралельного руху тіла
Аналогічно маємо для прискорень:
![]() .
(2.2.8)
.
(2.2.8)
В
свою чергу прискорення
![]() в обертальному русі можна розкласти на
два прискорення:
в обертальному русі можна розкласти на
два прискорення:
![]() ,
(2.2.9)
,
(2.2.9)
де
![]() - нормальне прискорення,
- нормальне прискорення,
![]() - тангенціальне прискорення. Нормальне
прискорення визначається за формулою:
- тангенціальне прискорення. Нормальне
прискорення визначається за формулою:
![]() (м/с2),
(2.2.10)
(м/с2),
(2.2.10)
Прискорення
![]() напрямлене від точки В до точки А вздовж
прямої АВ. Тангенціальне прискорення
дорівнює
напрямлене від точки В до точки А вздовж
прямої АВ. Тангенціальне прискорення
дорівнює
![]() (м/с2),
(м/с2),
де
![]() - кутове прискорення тіла в с-2.
З врахуванням (2.2.9) формула (2.2.8) для
прискорення точки В приймає вигляд:
- кутове прискорення тіла в с-2.
З врахуванням (2.2.9) формула (2.2.8) для
прискорення точки В приймає вигляд:
![]() .
(2.2.11)
.
(2.2.11)
На рисунку 2.7,а зображено тіло, яке здійснює плоско-паралельний рух, на рисунку 2.7,б – векторний многокутник швидкостей, на рисунку 2.7,в – векторний многокутник прискорень. Такі многокутники називаються планами швидкостей та прискорень тіла.
Побудова планів швидкостей і прискорень механізму виконується, починаючи від ведучої ланки в послідовності нашарування структурних груп.
Докладніше кінематичне дослідження методом планів швидкостей і прискорень розглянуто для конкретного механізму в прикладі оформлення курсового проекту (додаток Ж).