

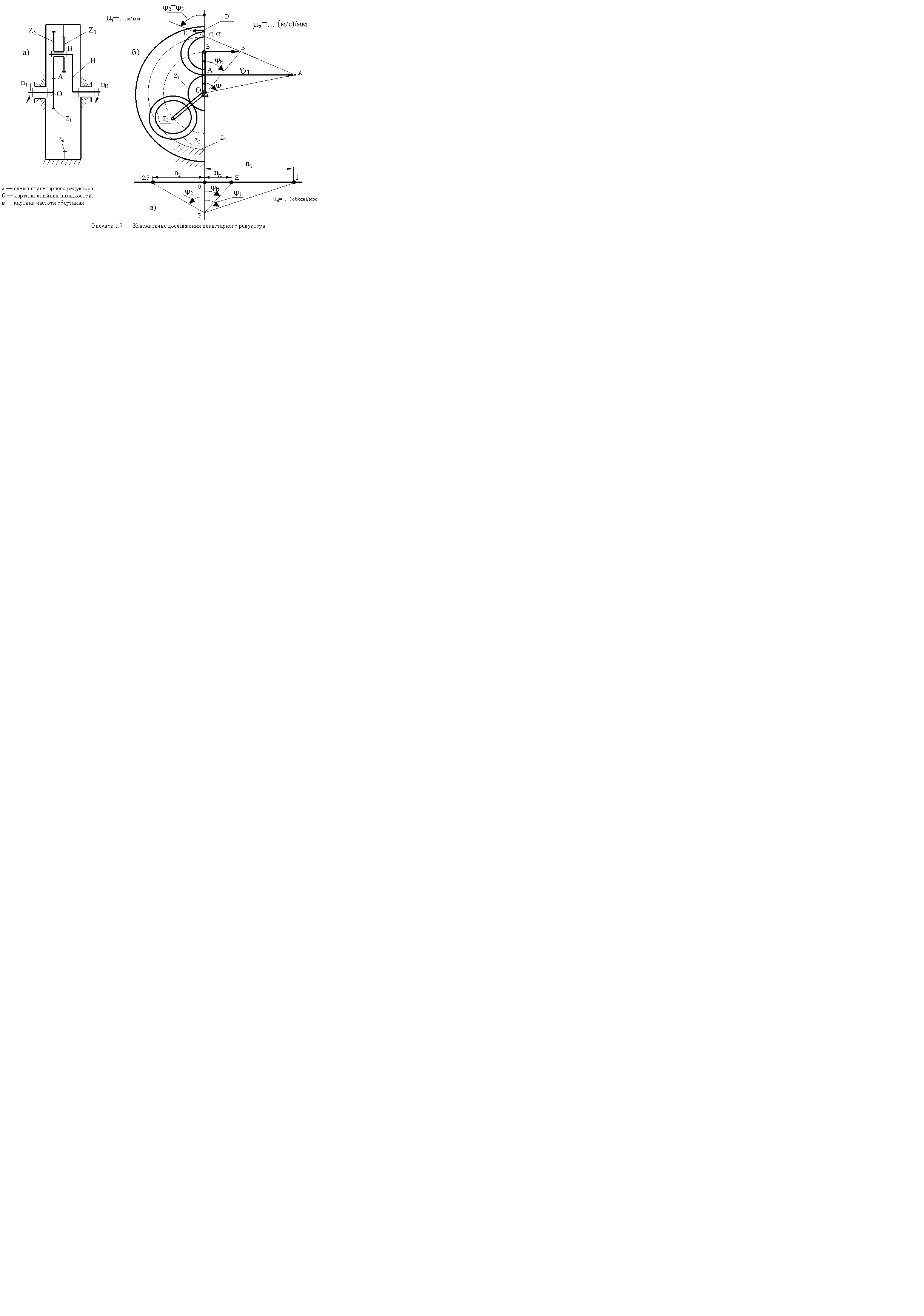
Графічний метод дослідження
Креслимо картину лінійних швидкостей коліс, поєднуючи її з другою половиною проекції редуктора. Попередньо визначаємо лінійну швидкість точки А колеса 1
![]() ,
,
де n1 – частота обертання першого колеса редуктора.
З точки А – полюса зачеплення коліс
1 і 2, відкладаємо відрізок АА´,
зображаючий вектор лінійної швидкості
колеса 1. Довжина відрізка АА´
береться довільно, але так, щоб масштабний
коефіцієнт креслення картини лінійних
швидкостей, яких розраховується за
формулою
![]() [
[![]() ]
мав би числові значення 0,1; 0,2; 2,3; … 1; 2.
]
мав би числові значення 0,1; 0,2; 2,3; … 1; 2.
Швидкість центра О колеса 1 дорівнює
нулю. Закон розподілення швидкостей –
лінійний, тому, з’єднуючи прямою лінією
точку О з кінцем вектора швидкості
точки А, одержимо закон розподілення
швидкостей для колеса 1 у вигляді прямої
лінії ОА′ (рисунок 1.7б), що утворює
кут
![]() з вертикаллю.
з вертикаллю.
Колеса 2 і 3 вступають як єдине тверде
тіло – блок шестерень. Швидкість точки
с колеса 3 дорівнює нулю – вона є
миттєвим центром швидкостей цього
блоку, тому що колесо 4 нерухоме. З’єднуючи
точки А′ і С, одержимо закони
розподілення швидкостей коліс 2 і 3 у
вигляді лінії А’С, яка утворює кут
![]() з вертикаллю. Цьому законові підпорядкована
також точка В центра блока, яка
водночас є точкою водила Н. З точки
В проводимо горизонтальну лінію до
перетину з лінією А′С у точці В′
з точкою О, отримуємо пряму розподілення
швидкостей для водила Н, яка утворює
кут
з вертикаллю. Цьому законові підпорядкована
також точка В центра блока, яка
водночас є точкою водила Н. З точки
В проводимо горизонтальну лінію до
перетину з лінією А′С у точці В′
з точкою О, отримуємо пряму розподілення
швидкостей для водила Н, яка утворює
кут
![]() з вертикаллю.
з вертикаллю.
Переходимо до креслення діаграми частот обертання коліс (рисунок 1.7в).
Проводимо
горизонтальну пряму. З довільної точки
0
проводимо перпендикуляр, на якому
відкладаємо відрізок ОР
довільної довжини (20…50мм). З полюсу Р
проводимо промені Р1,
Р2, РН під
кутами
![]() ,
,
![]() ,
,
![]() до перетину з горизонтальною прямою.
Утворені відрізки О1, О2, ОН зображають
відповідно у масштабному коефіцієнті
до перетину з горизонтальною прямою.
Утворені відрізки О1, О2, ОН зображають
відповідно у масштабному коефіцієнті
![]() ,
що розраховується за формулою
,
що розраховується за формулою
![]() [
[![]() ],
частоти обертання коліс 1, 2, 3 та Н.
],
частоти обертання коліс 1, 2, 3 та Н.
Результати дослідження слід звести в таблицю Д2 (див. додаток Г).
Аналітичний метод дослідження
Підраховуємо частоту обертання водила Н, знаючи частоту обертання колеса 1
![]() ,
,
де u1H – розрахункове передаточне відношення планетарного редуктора.

Частоту обертання сателітів визначаємо на основі методу зворотного руху (метод Вілліса). Для планетарного механізму у зворотному русі маємо
![]() .
.
Звідси
![]()
Результати кінематичного дослідження редуктора аналітичним методом заносимо в таблицю, порівнюємо з графічним та визначаємо похибку.
-
Рекомендована послідовність виконання синтезу та аналізу зубчастої передачі
(Лист 1)
-
Вибрати вихідні дані відповідно до заданої схеми та варіанта. Ознайомитися з параметрами вихідного контуру.
-
В залежності від типу зачеплення зубчастої передачі вибрати коефіцієнти зміщення (при заданій міжосьовій відстані аw розрахувати необхідні коефіцієнти зміщення х1 та х2) та визначити кут зачеплення
 .
. -
Розрахувати геометричні параметри заданої евольвентної пари циліндричних зубчастих коліс. Виконати перевірку результатів розрахунків за допомогою ЕОМ.
-
Побудувати картину евольвентного зубчастого зачеплення в торцевому перерізі. На кресленні показати не менше трьох зубців на кожному колесі. Масштаб побудови вибрати таким, щоб висота зубця на кресленні становила не менше 45мм. Виділити на кресленні теоретичну та активну лінії зачеплення, активні ділянки профілів зубців, показати основні розміри.
5. Скласти таблицю параметрів (основні дані, дані для контролю і довідкові дані), яку розмістити на кресленні у відповідності до вимог ЄСКД.
6. Розрахувати якісні показники (коефіцієнти перекриття зубчастої пари, відносного ковзання та питомого тиску) і побудувати їх діаграми.
7. Вибрати вихідні дані для проектування планетарної передачі (при необхідності визначити передаточне відношення планетарного механізму).
8. Виконати розрахунок (вибір кількості зубців планетарного механізму) методом співмножників [5], отримані результати зіставити з результатами розрахунку на ЕОМ (див. додаток К).
9. Перевірити умови співвісності, сусідства та складання.
10. Розрахувати ККД планетарного механізму.
11. Визначити розміри зубчастих коліс планетарного механізму для вибраного варіанта чисел зубців (із умови мінімальних розмірів передачі) та викреслити його кінематичну схему у вибраному масштабі на кресленні.
12. Побудувати діаграми лінійних та кутових швидкостей, виконати кінематичне дослідження планетарного механізму графічним та аналітичним методами.
13. Ознайомитися з питаннями, що пропонуються до захисту курсового проекту.