

Немає Малюнка
2.12 (PosTMM2 - kompas)
2.3.3 Визначення сили і моментів сил інерції
З курсу теоретичної механіки відомо: якщо ланка здійснює складний плоско-паралельний рух, елементарні сили інерції частинок маси зводяться до сили інерції
Fiн = -maS, (2.3.2)
прикладеної в центрі маси S ланки і до моменту сил інерції
Mін = -IS. (2.3.3)
У формулах (2.3.2) і (2.3.3): m – маса ланки, aS – прискорення центра мас ланки, IS – момент інерції ланки відносно осі, що проходить через центр її ваги S, - кутове прискорення. Знак мінус у формулах означає, що напрям сили інерції Fін протилежний до напрямку прискорення aS, а напрям моменту сил інерції Мін протилежний до напрямку кутового прискорення .
Я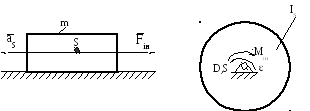 кщо
ланка рухається поступально (рисунок
2.13,а), то
= 0; Мін = 0, і на ланку діє тільки
сила інерції ( Fiн
= -maS).
кщо
ланка рухається поступально (рисунок
2.13,а), то
= 0; Мін = 0, і на ланку діє тільки
сила інерції ( Fiн
= -maS).
а)
б)
Рисунок 2.13 – Поступальний (а) та обертальний (б) рух ланки
При нерівномірному русі (обертання) ланки навколо осі (рисунок 2.13,б), що проходить через його центр ваги, аS = 0, Fiн = 0, а на ланку діє тільки момент сил інерції (Мін = IS ).
Якщо ланка здійснює складний плоскопаралельний рух (рисунок 2.14), то на неї одночасно діють, як було сказано вище, і сила інерції Fін, і момент сил інерції Мін. З метою спрощення розрахунків, доцільно замінити дію сили інерції Fін і моменту сил інерції Мін однією рівнодіючою силою FIін (рисунок 2.14, а), що розміщена на плечі
![]() .
(2.3.4)
.
(2.3.4)

а) б)
Рисунок 2. 14 – Плоско-паралельний рух ланки
Причому, рівнодіюча сили FIін паралельна силі інерції Fін і рівна їй за величиною (FIін = Fін).
Можливо також момент інерції Мін замінити парою сил (FIІін = FIін), прикладених перпендикулярно до ланки в кінематичних парах А і В (рисунок 2.14, б) у напрямку протилежному кутовому прискоренню .
Величина пари сил визначається за формулою:
![]() ,
(2.3.5)
,
(2.3.5)
де
![]() - довжина ланки.
- довжина ланки.
Рисунок 2.15 – Обертання ланки навколо нерухомої осі
Якщо ланка здійснює нерівномірний обертальний рух навколо осі О, що не збігається з центром ваги S (рисунок 2.15), то у цьому випадку доцільно силу інерції Fін і момент сил інерції Мін звести до однієї сили інерції FIін = Fін, прикладеної в центрі хитання (точка К), відстань до якої визначаємо за формулою:
![]() (2.3.6)
(2.3.6)
де
![]() - відстань від нерухомої осі до центра
ваги S ланки.
- відстань від нерухомої осі до центра
ваги S ланки.
2.3.4 Загальні відомості до кінетостатичного розрахунку
Кінетостатичний розрахунок дозволяє, як було вказано раніше, знаходити реакції в кінематичних парах, тобто визначати ті сили тиску, які виникають в місцях дотику елементів кінематичних пар, а також знаходити зрівноважувальну силу або зрівноважувальний момент.
Силовий розрахунок будемо виконувати графоаналітичним методом без врахування тертя в кінематичних парах і з припущенням, що діючі на ланки механізму сили розташовані в одній площині.
Силовий аналіз виконується методом кінетостатики, що базується на принципі Даламбера, відомого із курсу теоретичної механіки, і згідно з яким: якщо до всіх зовнішніх сил, що діють на систему, додати дію сил інерції, то рухома система сил може вважатися у дану мить часу як така, що знаходиться у рівновазі. Інакше кажучи, для будь-якого статично визначеного кінематичного ланцюга (механічної системи) геометрична сума прикладених до нього сил, реакцій в кінематичних парах і сил інерції дорівнює нулю, а також дорівнює нулю і сума моментів всіх вказаних сил відносно довільної вибраної точки системи.
Послідовність силового аналізу механізмів обернена до кінематичного дослідження, тобто силовий розрахунок розпочинають із структурної групи, що приєднана останньою у процесі утворення механізму, і закінчують розрахунком ведучої ланки початкового механізму (ведучої ланки і стояка).
Загальна методика силового розрахунку структурних груп різних видів досить детально розглянута в навчальній літературі [2, 6], тому в даному посібнику наведено тільки приклад такого розрахунку для конкретного механізму (додаток Ж).