

3.7 Визначення основних розмірів та маси маховика
Конструктивно маховик може буди виготовленим у вигляді суцільного диска (рисунок 3.3.а), або обода зі спицями (рисунок 3.3.б).
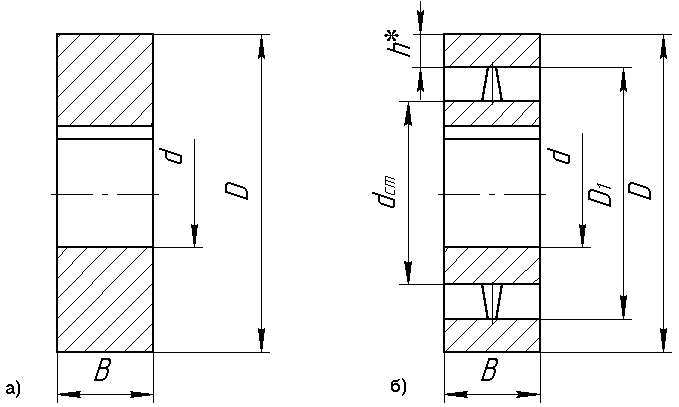
Рисунок 3.3 – Конструктивна форма маховика
Якщо діаметр маховика D<0.3м, то рекомендується його виконувати у вигляді суцільного диска. Зовнішній діаметр такого маховика можна визначити за формулою:
![]() ,
(3.17)
,
(3.17)
де В=В/D – відносна ширина маховика, яку рекомендується приймати в межах В=0.2...0.4; - густина матеріалу маховика (для сталевих - =7800кг/м3, для чавунних - =7100кг/м3).
Масу маховика у вигляді суцільного диска (рисунок 3.3.а) визначають за формулою
![]() .
(3.18)
.
(3.18)
Маховик, розміри якого передбачаються за зовнішнім діаметром D>0.3м, рекомендується виконувати у вигляді масивного обода (кільця). Зовнішній діаметр такого маховика (рисунок 3.3.б) визначається за формулою
![]() (3.19)
(3.19)
де Н = D1/D – відношення внутрішнього діаметра кільця до зовнішнього, яке рекомендується приймати в межах Н=0.6....0.8.
Отримане за формулами (3.17) і (3.18) розрахункове значення зовнішнього діаметра D маховика округляють до найближчого більшого цілого числа (рекомендується приймати із стандартного ряду лінійних розмірів). Після чого визначають ширину обода В=В D і розраховують масу обода маховика:
![]() .
(3.20)
.
(3.20)
Необхідно враховувати при виборі конструктивної форми маховика, що при одному і тому ж моменті інерції, маса маховика у вигляді обода наближено в 1.5 рази менша, ніж маса маховика у вигляді суцільного диска.
При кінцевому прийнятті конструктивних розмірів маховика слід брати до уваги такі рекомендації: зовнішній діаметр маховика, якщо він встановлений на валу кривошипа, не повинен перевищувати радіус кривошипа більше ніж в 2-3 рази. Поперечний переріз обода маховика приймають у вигляді прямокутника (рисунок 3.3.б), в якому:
В=2/3h*, (3.21)
де h* - висота прямокутника (кільця). Висоту обода маховика, знаючи його масу, можна розрахувати за формулою:
![]() .
(3.22)
.
(3.22)
Діаметр отвору d для посадки маховика на вал та діаметр ступиці dcт розраховуємо за емпіричними формулами:
![]() ;
(3.23)
;
(3.23)
![]() .
(3.24)
.
(3.24)
Крім того зовнішній діаметр обода маховика перевіряють із умови обмеження колової швидкості через розрив маховика за формулою
![]() ,
(3.25)
,
(3.25)
де М-кутова швидкість вала, на якому встановлено маховик, в с-1; vдоп-допустима колова швидкість обода маховика в м/с (для чавунних маховиків vдоп=40м/с, для сталевих - vдоп=100м/с).
Момент інерції та маса маховика залежать від розміщення його в кінематичному ланцюзі привода машини. Маховик може бути розташованим: а) безпосередньо на валу ведучої ланки (кривошипа) механізму; б) на одному із валів привода між виконавчим механізмом і двигуном; в) на валу електродвигуна.
У випадку посадки маховика на кривошипному валі, момент інерції (розрахований за формулою (3.16)), маса і габаритні розміри його будуть найбільшими і можуть перевищити допустимі межі.
Для зменшення моменту інерції та маси маховика його доцільно розмістити на ланці, яка обертається з більшою кутовою швидкістю, ніж кривошип (наприклад, на валі електродвигуна). Тоді момент інерції маховика Імі, встановлений на і-й ланці (із умови збереження енергії рівності кінетичної енергії), визначається за формулою
![]() ,
,
де 1-кутова швидкість кривошипа; м-кутова швидкість ланки, на якій встановлено маховик.
Конкретно для випадку, коли маховик встановлено на валі електродвигуна, момент інерції Іm1 його розраховують за формулою:
![]() ,
(3.26)
,
(3.26)
де Uзаг=(дв/1) - загальне передаточне відношення від двигуна до кривошипа.
Отже, при посадці маховика на швидкохідному валі його момент інерції зменшується обернено пропорційно квадрату передаточного відношення привода. Відповідно стануть менші габаритні розміри і маса маховика.
Проте є інші міркування. Зубчасті колеса передаточних механізмів погано сприймають ударні навантаження, які виникають під час роботи важільних механізмів (молотів, пресів, компресорів, насосів тощо). В цьому разі маховик вже краще встановити на валі вхідної ланки важільного механізму (на валі кривошипа). При цьому інертність маси маховика в значній мірі запобігне передачі ударних навантажень на передаточні механізми.