

Структурные схемы средств измерений
Общие замечания. С целью изучения и обобщения теории средств измерений вводится понятие о звене и структурной схеме. В средстве измерений сигнал, несущий информацию о значении измеряемой величины, обычно претерпевает ряд преобразований с целью получения нужного выходного сигнала. Каждое преобразование сигнала можно представить себе происходящим как бы в отдельном узле, носящем название «звено». Соединение этих узлов-звеньев в определенную цепь преобразований носит название структурной схемы.
Разбивка средства измерений на звенья может быть произведена по различным признакам. При анализе в статическом режиме средство измерений обычно разбивают на звенья, которые представляют интересующие исследователя функции преобразования. При анализе в динамическом режиме звенья выделяются по их динамическим характеристикам (по виду дифференциального уравнения, описывающего их поведение).
Отдельный конструктивный узел измерительного устройства не обязательно совпадает со звеном в структурной схеме. В одном конструктивном узле может осуществляться несколько преобразований, а, следовательно, один конструктивный узел может соответствовать нескольким звеньям.
В зависимости от соединения отдельных звеньев различают два основных вида структурных схем: прямого преобразования (действия) и компенсационного преобразования (действия). Последний вид называют также схемой с отрицательной обратной связью.
Средства измерений прямого преобразования в статическом режиме. Структурная схема средства измерений прямого преобразования показана на рис. 3, где П1, П2,…, Пn - звенья; х - входной сигнал, несущий информацию об измеряемой величине; х1, x2,…, хn-1 - промежуточные сигналы; хn - выходной сигнал.
![]()
Рис. 3. Структурная схема средства измерений прямого преобразования
Как видно из рис. 3, входной сигнал х последовательно претерпевает несколько преобразований и в конечном итоге на выходе получается сигнал хn.
Для измерительного прибора сигнал хn получается в форме, доступной для непосредственного восприятия наблюдателем, например в виде отклонения указателя отсчетного устройства.
Для измерительного преобразователя сигнал хn получается в форме, удобной для передачи, дальнейшего преобразования, обработки и (или) хранения.
Примером электроизмерительного прибора, имеющего структурную схему прямого преобразования, может быть амперметр для измерения больших постоянных токов. В схеме этого прибора измеряемый ток вначале с помощью шунта преобразуется в падение напряжения на шунте, затем в малый ток, который измеряется измерительным механизмом, т. е. преобразуется в отклонение указателя.
Сигнал, несущий информацию об измеряемой величине, может периодически изменяться во времени (переменный ток, переменное напряжение, периодически изменяющийся механический момент и т.д.). Поэтому анализ структурных схем следовало бы вести с учетом понятий: комплексный коэффициент преобразования, комплексная чувствительность, комплексная погрешность. Однако далее для упрощения будем анализировать структурные схемы только для наиболее часто встречающегося сигнала, амплитуда которого - информативный параметр.
Чувствительность (коэффициент преобразования) средства измерения, имеющего структурную схему прямого преобразования,
 (1.8)
(1.8)
где
 - коэффициенты преобразования отдельных
звеньев3.
- коэффициенты преобразования отдельных
звеньев3.
Мультипликативная погрешность возникает при изменении коэффициентов преобразования. С течением времени и под действием внешних факторов коэффициенты k1,k2,…,kn4 могут изменяться соответственно на Δk1,Δk2,…,Δkn. При достаточно малых изменениях этих коэффициентов можно пренебречь членами второго и большего порядка малости и тогда относительное изменение чувствительности (коэффициента преобразования)
 (1.9)
(1.9)
Изменение чувствительности (коэффициента преобразования) приводит к изменению выходного сигнала на значение Δхn = (S + ΔS)x – Sx = ΔSx. Этому изменению выходного сигнала соответствует абсолютная погрешность измерения еходной величины
![]() (1.10)
(1.10)
Как видно из (1.10), погрешность, вызванная изменением чувствительности (коэффициента преобразования), является мультипликативной5.
Относительная мультипликативная погрешность измерения δМ = ΔS/S.
Аддитивная погрешность вызывается дрейфом «нуля» звеньев, наложением помех на полезный сигнал и т. д., приводящих к смещению графика функции преобразования i-го звена на ±Δх0i, как показано на рис. 4. Значение аддитивной погрешности можно найти, введя на структурной схеме после соответствующих звеньев дополнительные внешние сигналы Δx01,Δx02,…,Δx0n, равные смещениям функций преобразования звеньев.

Рис 4. Функция преобразования звена
Для оценки влияния этих дополнительных сигналов пересчитаем (приведем) их к входу структурной схемы. Результирующее действие всех дополнительных сигналов будет равно действию следующего дополнительного сигнала на входе:
 (1.11)
(1.11)
Результирующая аддитивная погрешность равна Δх0. Таким образом, как следует из (1.9) и (1.11), в средствах измерений, имеющих структурную схему прямого преобразования, происходит суммирование погрешностей, вносимых отдельными звеньями, и это затрудняет изготовление средств измерений прямого преобразования с высокой точностью.
Средства измерений компенсационного преобразования в статическом режиме. Структурная схема средства измерений компенсационного преобразования показана на рис. 5.
Для цепи обратного преобразования (обратной связи)
![]() (1.12)
(1.12)
где β - коэффициент преобразования цепи обратного преобразования; β1,β2,…,βm - коэффициенты преобразования звеньев обратной связи.
На входе цепи прямого преобразования происходит сравнение (компенсация) входной измеряемой величины х и выходной величины цепи обратного преобразования х'm, которая должна быть однородной с величиной х и иметь при установившемся режиме противоположный знак.

Рис. 5. Структурная схема средства измерений компенсационного преобразования
При подаче на вход сигнала х выходной сигнал хn, а следовательно, и х'm будут возрастать до тех пор, пока сигналы х и х'm не станут равны. При этом по значению хn можно судить об измеряемой величине х.
Средства измерений, имеющие такую структурную схему, могут работать как с полной компенсацией (устройства с астатической характеристикой), так и с неполной компенсацией (устройства со статической характеристикой).
При полной компенсации в установившемся режиме
![]() (1.13)
(1.13)
Это возможно в тех устройствах, у которых в цепи прямого преобразования предусмотрено интегрирующее звено с функцией преобразования xi = tF (хi-1). Примером такого звена является электродвигатель, для которого угол поворота вала определяется приложенным напряжением и временем.
В этом случае, учитывая (1.12) и (1.13), получим
 (1.14)
(1.14)
Таким образом, в момент компенсации сигнал на выходе средства измерений пропорционален входному сигналу и не зависит от коэффициентов преобразования цепи прямого преобразования.
Чувствительность (коэффициент преобразования)
 (1.15)
(1.15)
Мультипликативная относительная погрешность измерения, обусловленная нестабильностью коэффициентов преобразования звеньев, при достаточно малых изменениях этих коэффициентов
 (1.16)
(1.16)
Как видно из (1.16), относительная мультипликативная погрешность обусловлена только относительным изменением коэффициента преобразования цепи обратного преобразования, причем увеличение коэффициента β вызывает отрицательную мультипликативную погрешность.
Аддитивная погрешность в средствах измерений с полной компенсацией практически обусловливается порогом чувствительности звеньев, расположенных до интегрирующего звена, и порогом чувствительности самого интегрирующего звена.
Под порогом чувствительности звена понимается то наименьшее изменение входного сигнала, которое способно вызвать появление сигнала на выходе звена. Порог чувствительности имеют, например, электродвигатели, часто применяемые в рассматриваемых устройствах.

Рис. 6. Функция преобразования с порогом чувствительности
Для реальных звеньев график функции преобразования может иметь вид, показанный на рис. 6, где ±Δxi-1 - порог чувствительности.
Порог чувствительности средства измерений с полной компенсацией зависит от порогов чувствительности звеньев, расположенных в цепи прямого преобразования до интегрирующего звена, и самого интегрирующего звена следующим образом:
 (1.17)
(1.17)
где Δхi - порог чувствительности интегрирующего звена.
При наличии звеньев с порогом чувствительности состояние компенсации наступает при х - х'm = ±Δх. Таким образом, изменение входного сигнала в пределах ±Δх не вызывает изменения выходного сигнала, т.е. появляется абсолютная аддитивная погрешность Δх0, значение которой может быть в пределах ±Δх.
Из (1.17) очевидно, что для уменьшения аддитивной погрешности, обусловленной порогом чувствительности звеньев, следует увеличивать коэффициенты преобразования kl, k2,…, ki-1. Предел увеличения этих коэффициентов обусловлен динамической устойчивостью устройства (см. далее).
При неполной компенсации в средствах измерений интегрирующего звена нет и обычно выполняется условие (1.12), а также
![]() (1.18)
(1.18)
где k = kl, k2,…, kn - коэффициент преобразования цепи прямого преобразования.
В этом случае установившийся режим наступает при некоторой разности:
![]() (1.19)
(1.19)
Разность Δх необходима для поддержания сигнала хп на требуемом уровне.
Зависимость между выходным сигналом и входным, находимая путем решения уравнений (1.12), (1.18) и (1.19)
 (1.20)
(1.20)
Как видно из (1.20), при установившемся режиме выходной сигнал пропорционален входному и зависит от коэффициентов преобразования цепи как обратного, так и прямого преобразования.
Если выполняется условие kβ![]() 1,
то уравнение (1.20) переходит в (1.14) и при
этом нестабильность коэффициента-преобразования
цепи прямого преобразования не влияет
на работу устройства. Практически чем
выше kβ, тем меньше влияние
k. Предел увеличения kβ
обусловлен динамической устойчивостью
средства измерений (см. далее)
1,
то уравнение (1.20) переходит в (1.14) и при
этом нестабильность коэффициента-преобразования
цепи прямого преобразования не влияет
на работу устройства. Практически чем
выше kβ, тем меньше влияние
k. Предел увеличения kβ
обусловлен динамической устойчивостью
средства измерений (см. далее)
Чувствительность (коэффициент преобразования) средства измерений с неполной компенсацией
 (1.21)
(1.21)
Отсюда видно, что для получения высокой
чувствительности следует снижать β
но для выполнения условия kβ
![]() 1 необходимо увеличивать k.
1 необходимо увеличивать k.
Мультипликативная погрешность, обусловленная изменением коэффициентов преобразования звеньев при достаточно малых изменениях этих коэффициентов
 (1.22)
(1.22)
где

Если kβ
![]() 1, то
1, то
 (1.23)
(1.23)
Следовательно, при kβ
![]() 1 (что обычно имеет место) составляющая,
обусловленная изменением коэффициента
β целикам входит в результирующую
погрешность, а составляющая, обусловленная
изменением коэффициента k, входит
в результирующую погрешность
ослабленной в kβ раз.
1 (что обычно имеет место) составляющая,
обусловленная изменением коэффициента
β целикам входит в результирующую
погрешность, а составляющая, обусловленная
изменением коэффициента k, входит
в результирующую погрешность
ослабленной в kβ раз.
Нелинейность функции преобразования цепи прямого преобразования можно рассматривать как результат влияния изменения коэффициента преобразования k относительно некоторого начального значения при х = 0. Полученные уравнения показывают, что нелинейность функции преобразования уменьшается действием отрицательной обратной связи в kβ раз.
Аддитивная погрешность может быть проанализирована путем введения в структурную схему дополнительных сигналов Δх01, Δх02, Δx0n,…,Δх'01, Δx'02,...,Δх'0m, равных смещениям функций преобразования соответствующих звеньев.
Применяя методику, рассмотренную рацее, получим абсолютную аддитивную погрешность
 (1.24)
(1.24)
Следует отметить, что средства измерений могут иметь комбинированные структурные схемы, как, например, показано на рис. 7.
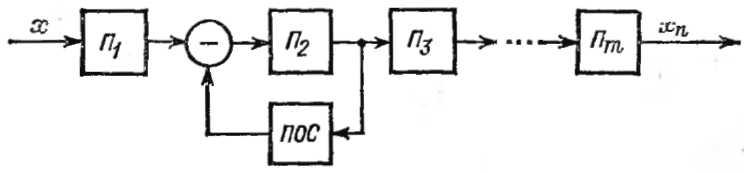
Рис. 7. Комбинированная структурная схема средства измерений
Принцип построения структурной схемы средства измерений влияет не только на рассмотренные характеристики (чувствительность, погрешность), но также на входные и выходные сопротивления, динамические свойства и др.
Методы уменьшения погрешностей. Статическая погрешность средств измерений в реальных условиях эксплуатации есть разность между статической реальной функцией преобразования средства измерений в момент измерения и номинальной характеристикой преобразования (при номинальных условиях) того же средства измерения. Задача уменьшения погрешности сводится к проблеме минимизации этой разности, что может быть выполнено двумя путями.
Первый путь состоит в том, что тем или иным способом обеспечивается неизменность во времени реальной функции преобразования средства измерения,-ее независимость от изменения внешних факторов и близость к номинальной характеристике преобразования. Этот путь обеспечивается методами стабилизации реальной функции преобразования средства измерений.
Второй путь заключается в том, что в процессе эксплуатации средства измерений каким-либо способом оценивается отличие его статической реальной функции преобразования от номинальной характеристики преобразования и реальная функция преобразования изменяется так, чтобы она все время была близка к номинальной характеристике преобразования. Этому пути соответствуют методы автоматической коррекции погрешностей средств измерений,
Стабилизация реальной функции преобразования достигается как конструктивными и технологическими, так и структурными методами. Конструктивные и технологические методы предполагают: изготовление средств измерений из точных, стабильных элементов, параметры которых мало подвержены различным •влияниям; применение стабильных материалов; термостатирование; магнитное и электрическое экранирование; стабилизацию источников питания и т. п.
К первой группе структурных методов стабилизации статической реальной характеристики относят методы отрицательной обратной связи. Как было показано, применение отрицательной обратной связи (компенсационного преобразования) снижает мультипликативные, а при некоторых условиях, и аддитивные погрешности. Уменьшается также погрешность нелинейности.
Ко второй группе структурных методов относят так называемые методы составных параметров. Суть этих методов в том, что вводятся дополнительные элементы, через которые влияющий фактор (возмущение) воздействует на реальную функцию преобразования в сторону, обратную воздействию того же фактора через основные элементы. Примерами методов составных параметров являются методы температурной и частотной компенсации электроизмерительных приборов, о которых речь пойдет ниже.
Отличительным признаком методов автоматической коррекции погрешностей является обеспечение ими близости реальной функции преобразования средства измерений к номинальной функции путем изменения реальной функции под воздействием корректирующего сигнала, соответствующего разности между реальной и номинальной функциями преобразования.
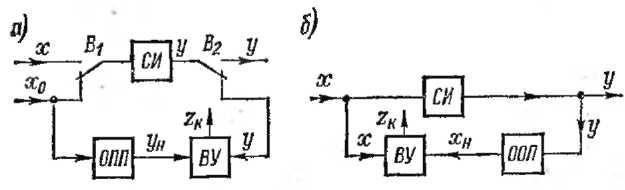
Рис. 8. Структурные схемы, поясняющие способы автоматической коррекции погрешностей
На рис. 8, а показан» структурная схема, поясняющая метод образцовых сигналов, где СИ - средство измерений; ОПП - образцовый прямой преобразователь, имеющий функцию преобразования, равную номинальной функции преобразования СИ; ВУ - вычитающее устройство.
При подаче на второй вход СИ известного сигнала х0 на выходе ВУ образуется сигнал коррекции zk = у - ун, определяемый разностью реальной и номинальной функций преобразования при х = х0. Как видно, в этом случае процесс выделения сигнала zk и процесс преобразования измеряемой величины разделяются во времени с помощью переключателей В1 и В2.
На рис. 8, б приведена структурная схема, поясняющая метод обратного преобразования, где ООП – образцовый обратный преобразователь, имеющий функцию преобразования, обратную номинальной характеристике СИ. Разность zk = хн - х выделяется вычитающим устройством ВУ к представляет собой корректирующий сигнал. В этом случае корректирующий сигнал выдается непрерывно.
Коррекция погрешности при использовании двух рассмотренных методов выявления корректирующего сигнала может осуществляться как путем самонастройки, так и введением поправок.
В первом случае корректирующий сигнал вызывает такое изменение параметров схемы СИ, при котором реальная функция преобразования СИ приближается к номинальной характеристике преобразования.
Во втором случае корректирующий сигнал формирует поправку к выходному сигналу, автоматически вводимую на выход СИ вместе с выходным сигналом СИ.
Рассмотренные способы автоматической коррекции погрешностей находят практическое применение в различных средствах измерений.
Средства измерений в динамическом режиме. При исследовании динамического режима средства измерений его структурная схема разбивается на звенья, как было указано в начале параграфа. Теоретическое исследование динамического режима обычно преследует две цели: исследование переходного процесса, характеристикой которого является время установления выходного сигнала, и определение динамической погрешности. В настоящем параграфе рассматриваются некоторые вопросы переходного процесса в средстве измерений в предположении, что все звенья являются линейными, т.е. переходный процесс в звеньях описывается линейными дифференциальными уравнениями с постоянными коэффициентами. Кроме того, уравнения каждого звена - первого или второго порядка.
Рассмотрим структурную схему прямого преобразования (рис. 3). Составляя дифференциальные уравнения для каждого звена при скачкообразном изменении входного сигнала от нуля до значения хс, получим, например, систему дифференциальных уравнений:
 (1.25)
(1.25)
В этих уравнениях а1, a2,..., аn+1; k1, k2,…,kn - постоянные коэффициенты (ki - коэффициенты преобразования).
Решая совместно систему уравнений (1,25) относительно выходного сигнала и его производных, получим
![]() (1.26)
(1.26)
где b1, b2,..., bn - постоянные коэффициенты, зависящие от коэффициентов, входящих в систему уравнений (1.25) и от значения хс. Решением уравнения (1.26) или исследованием его при помощи математической модели для решения уравнении можно определить время установления выходного сигнала и влияние на его значение отдельных звеньев и их параметров.
В гл. 3 рассмотрены характеристики переходного процесса для некоторых приборов. При исследовании средств измерений компенсационного преобразования (замкнутой структуры), например в соответствии со схемой рис. 1.4, необходимо аналогичным путем составить дифференциальное уравнение для выходного сигнала. Если цепь обратного преобразования обладает также инерционностью, то порядок дифференциального уравнения повышается и значения постоянных коэффициентов изменяются, Это означает, что характер переходного процесса от введения цепи обратного преобразования может существенно измениться. Оказывается, что в некоторых случаях в замкнутых структурах могут возникнуть незатухающие колебания, т. е. средство измерений не будет устойчивым в работе и пользоваться им будет нельзя. Потеря устойчивости определяет границу максимального значения глубины обратной связи. Устойчивость работы замкнутых структур (критерии устойчивости) рассматривается в теории автоматического регулирования, полностью приложимой к компенсационным средствам измерений.