

3.2. Принцип действия, основы теории и применения измерительных механизмов
Магнитоэлектрические измерительные механизмы. В магнитоэлектрических измерительных механизмах вращающий момент создается в результате взаимодействия магнитного поля постоянного Магнита и магнитного поля проводника с током, выполняемого обычно в виде катушки – рамки.
Обратимся к рассмотрению принципа действия магнитоэлектрических измерительных механизмов.
На рис. 3.1 показана подвижная рамка измерительного механизма, находящаяся в равномерном радиальном магнитном поле. При протекании по обмотке рамки тока возникают силы F, стремящиеся повернуть рамку так, чтобы ее плоскость стала перпендикулярной к направлению О1 – О2. При равенстве вращающего и противодействующего моментов подвижная часть останавливается.
Для получения зависимости между углом отклонения и током в рамке обратимся к уравнению (3.1), которое применительно к нашему случаю представляется так:
 (3.5)
(3.5)
где Ф – поток, сцепляющийся с обмоткой рамки; I – ток в обмотке рамки.
Величина Ф может быть подсчитана как произведение индукции В в воздушном зазоре, числа витков ω обмотки рамки и суммы площадей двух боковых поверхностей, описанных активными сторонами подвижной катушки при ее повороте на угол α от нейтрального положения (оси О1 – О2).

Рисунок 3.1 – Подвижная катушка в радиальном магнитном поле.
В соответствии с рис. 3.1 активными сторонами обмотки рамки будут являться стороны, расположенные в плоскости, перпендикулярной рисунку. Стороны рамки, находящиеся в плоскости рисунка, при своем движении скользят вдоль силовых линии, не пересекая их, и поэтому не будут участвовать в создании вращающего момента. Следовательно,
![]()
где r – радиус рамки относительно оси вращения; I – длина рамки; α – угол отклонения рамки от нейтрального положения.
Обозначив площадь катушки через s, можем написать
![]()
Подставляя это выражение в формулу (3.5) и дифференцируя его, получим
![]() (3.6)
(3.6)
Так как противодействующий момент создается упругими элементами, то можно воспользоваться формулой (3.2) и для режима установившегося отклонения написать
![]()
откуда
![]() (3.7)
(3.7)
Как видно из выражения (3.7), при перемене направления тока в обмотке рамки меняется на обратное и направление отклонения подвижной части.
Для получения отклонения указателя в нужную сторону необходимо при включении прибора соблюдать указанную на приборе полярность.
Из выражения (3.7) и определения понятия чувствительности следует, что для магнитоэлектрических измерительных механизмов и, следовательно, для магнитоэлектрических приборов чувствительность
![]() (3.8)
(3.8)
Из уравнения (3.8) видно, что чувствительность магнитоэлектрического прибора не зависит от угла отклонения и постоянна шкале: отсюда следует, что магнитоэлектрические приборы имеют равномерную шкалу. Это позволяет выпускать их комбинированными и многопредельными.
Магнитоэлектрические приборы относятся к числу наиболее точных. Они изготовляются вплоть до класса точности 0,1. Высокая точность этих приборов объясняется рядом причин. Наличие равномерной шкалы уменьшает погрешности градуировки и отсчета. Благодаря сильному собственному магнитному полю влияние посторонних полей на показания приборов весьма незначительно. Внешние электрические поля на работу приборов практически не влияют. Температурные погрешности могут быть скомпенсированы с помощью специальных схем.
Большим достоинством магнитоэлектрических приборов является высокая чувствительность. В этом отношении магнитоэлектрические приборы не имеют себе равных. Известны магнитоэлектрические микроамперметры с током полного отклонения 0,1 мкА (например, типа М95, класса точности 1,0).
Благодаря этим достоинствам магнитоэлектрические приборы применяют с различными преобразователями переменного тока в постоянный для измерений в цепях переменного тока (см. п. 3.6).
К недостаткам магнитоэлектрических приборов следует отнести Несколько более сложную и дорогую конструкцию, чем, например, конструкция электромагнитных приборов, невысокую перегрузочную способность (при перегрузке обычно перегорают токоподводящие пружинки или растяжки для создания противодействующего момента) и, самое главное, отмеченную выше возможность применения в качестве амперметров и вольтметров лишь для измерений в цепях постоянного тока (при отсутствии преобразователей).
Магнитоэлектрические измерительные механизмы с механическим противодействующим моментом используются главным образом в амперметрах, вольтметрах и гальванометрах, а также в некоторых типах омметров.
Рассмотрим особенности устройства измерительных механизмов магнитоэлектрических логометров.
Как было указано выше, в логометрах противодействующий момент создается не механическим путем, а электрическим. Для этого в магнитоэлектрическом логометре (рис. 3.2) подвижная часть выполняется в виде двух жестко скрепленных между собой рамок 1 и 2, по обмоткам которых протекают токи I1, и I2. Пружинки для создания механического противодействующего момента не ставятся, а ток к обмоткам подводится с помощью безмоментных токопроводов, выполняемых в виде тонких неупругих металлических ленточек.

Рис. 3.2. Устройство измерительного механизма магнитоэлектрического логометра
Направления токов в обмотках выбираются так, чтобы моменты М1 и М2, создаваемые рамками, действовали навстречу друг другу. Один из моментов вращающий, а второй – противодействующий. Хотя бы один из моментов должен зависеть от угла поворота. Значит, один (или несколько) из параметров, определяющих значение момента, должен являться функцией угла α. Технически наиболее просто сделать зависящей от угла поворота индукцию В. Для этого магнитное поле в зазоре должно быть неравномерным, что достигается неравномерностью зазора (с этой целью сердечник на рис. 3.2 сделан эллипсоидальным).
В общем виде выражения для моментов М1 и М2 могут быть записаны так:

где k1 = s1ω1; k2 = s2ω2, F1(α) и F2(α) – функции, выражающие закон изменения индукции для рамок 1 и 2 при перемещении их в зазоре. При установившемся равновесии моменты М1 и М2 равны, т. е.
![]()
откуда

Выражение для угла поворота можно представить так:
 (3.9)
(3.9)
Из выражения (3.9) видно, что отклонение подвижной части логометра зависит от отношения токов в его обмотках.
Измерительные механизмы магнитоэлектрических логометров применяют прежде всего в омметрах (см. п. 3.8).
Электромагнитные измерительные механизмы. Вращающий момент в электромагнитных измерительных механизмах возникает в результате взаимодействия магнитного поля катушки, по обмотке которой протекает измеряемый ток, с одним или несколькими ферромагнитными сердечниками, обычно составляющими подвижную часть механизма. В настоящее время наибольшее применение получили три конструкции измерительных механизмов: а) с плоской катушкой; б) с круглой катушкой; в) с замкнутым магнитопроводом.
На рис. 3.3 показан измерительный механизм с плоской катушкой. Катушка 1 наматывается медным проводом и имеет воздушный зазор, в который может входить эксцентрично укрепленный на оси сердечник 2. Материал сердечника должен обладать высокой магнитной проницаемостью, что способствует увеличению вращающего момента при заданном значении потребления мощности прибором, и минимальной коэрцитивной силой, что уменьшает погрешность от гистерезиса. Обычно материалом сердечника в щитовых приборах служит электротехническая (кремнистая) сталь, а в точных переносных приборах – пермаллой.

Рис. 3.3. Электромагнитный измерительный механизм с плоской катушкой
При наличии тока в катушке сердечник стремится расположиться в месте с наибольшей концентрацией поля, т. е. втягивается в зазор катушки. При этом закручиваются пружинки 3, в результате чего возникает противодействующий момент. Для успокоения движения подвижной части в электромагнитных измерительных механизмах применяют обычно воздушные или жидкостные успокоители. На рис. 3.3 представлен измерительный механизм с воздушным успокоителем, состоящим из камеры 4 и крыла 5.
Одним из существенных недостатков электромагнитных измерительных механизмов с плоской или с круглой катушкой является сильное влияние внешних магнитных полей. Это объясняется тем, чтособственноемагнитное поле невелико. Для защиты от внешних полей применяются в основном два способа – астазирование и экранирование.
В астатическом измерительном механизме на оси подвижной Части укреплены два одинаковых сердечника, каждый из которых Размещается в магнитном поле одной из катушек, включенных Между собой последовательно. Направление обмоток выбрано так, что магнитные поля катушек, равные по значению и конфигурации, направлены навстречу друг другу. При этом подвижная часть будет находиться под действием суммы двух моментов, каждый из которых создается одним из сердечников и действующей на него катушкой. Если такой измерительный механизм попадает в равномерное внешнее поле, то один из моментов, для которого направления собственного и возмущающего полей будут совпадать, увеличится, а второй – соответственно уменьшится. Суммарный момент, а следовательно, и показания прибора при этом не изменяются. Недостатки астатического измерительного механизма заключаются в усложнении и удорожании конструкции, а также в том, что астазирование исключает действие только равномерных полей.
При магнитном экранировании измерительный механизм помещается внутрь замкнутой оболочки из ферромагнитного материала с большой магнитной проницаемостью (чаще всего из пермаллоя). Действие экрана состоит в том, что магнитные линии внешнего поля, стремясь пройти по пути с наименьшим магнитным сопротивлением, сгущаются внутри стенок экрана, почти не проникая во внутреннюю область. Для улучшения магнитной защиты иногда применяются экраны из двух или нескольких оболочек.
На рис. 3.4 показан электромагнитный измерительный механизм с замкнутым магнитопроводом. Катушка 1 помещена на магнитопровод 2 с полюсными наконечниками 3. При наличии тока в обмотке катушки подвижный сердечник 4 стремится повернуться по часовой стрелке вокруг оси 0, втягиваясь в рабочее пространство между полюсными накладками.

Рис. 3.4. Электромагнитный измерительный механизм с замкнутым магнитопроводом
Достоинствами измерительного механизма с замкнутым магнитоприводом являются: повышенная чувствительность, уменьшение погрешности от влияния внешних магнитных полей, возможность относительно просто менять характер шкалы путем изменения положения левого полюсного наконечника относительно правого. Обычно в измерительных механизмах с замкнутым магнитопроводом применяют растяжки и жидкостное успокоение.
В заключение отметим, что по своему устройству электромагнит–ные измерительные механизмы являются самыми простыми среди измерительных механизмов приборов разных групп.
На основании уравнения (3.1) определим вращающий момент электромагнитного измерительного механизма. Электромагнитная энергия катушки, по обмотке которой протекает ток,
![]()
где L – индуктивность катушки, зависящая от положения сердечника; I – ток в обмотке.
Выражение для вращающего момента будет

Если противодействующий момент создается с помощью упругих элементов, то для режима установившегося отклонения
![]()
откуда
![]()
Из выражения (3.10) видно следующее:
1. Знак угла отклонения подвижной части не зависит от направления тока в обмотке. Это значит, что электромагнитные приборы могут применяться для измерений в цепях постоянного и переменного тока. В цепи переменного тока они измеряют действующее значение тока (или напряжение).
2. Шкала электромагнитного прибора
неравномерная, т. е. между измеряемой
величиной (током) и углом отклонения
нет прямо пропорциональной зависимости.
Характер шкалы зависит от множителя
![]() ,
т. е. от закона изменения индуктивности
с изменением угла поворота сердечника
и от квадрата тока в катушке. Меняя форму
сердечника и его расположние в катушке,
можно получить практически равномерную
шкалу, начиная с 20 – 25% верхнего предела
диапазона измерений.
,
т. е. от закона изменения индуктивности
с изменением угла поворота сердечника
и от квадрата тока в катушке. Меняя форму
сердечника и его расположние в катушке,
можно получить практически равномерную
шкалу, начиная с 20 – 25% верхнего предела
диапазона измерений.
Устройство измерительного механизма электромагнитного ло–гометра с катушками А и Б представлено на рис. 3.5. Сердечники на оси укреплены так, что при повороте подвижной части в некоторых пределах индуктивность одной катушки увеличивается, а другой – уменьшается, вследствие чего вращающие моменты направлены в противоположные стороны. Взаимным влиянием одной катушки на другую пренебрегаем. Для статического равновесия можем написать
![]()
Решая это уравнение относительно
![]() ,
получим
,
получим
 (3.11)
(3.11)
Электромагнитные измерительные механизмы используются в настоящее время в амперметрах, вольтметрах, в фазометрах и частотомерах. Кроме этих приборов, применяются резонансные электромагнитные приборы в которых частота собственных колебаний подвижной части (сердечника) настраивается в резонанс с частотой тока в обмотке. К таким устройствам относятся вибрационные частотомеры (п. 3.7).
Главными достоинствами электромагнитных приборов являются: простота конструкции и, как следствие дешевизна и надежность в работе; способность выдерживать большие перегрузки, что объясняется отсутствием токоподводов к подвижной части: возможность применения для изменений в цепях постоянного и переменного тока (отдельных приборов до частоты примерно 10 000 Гц).
К недостаткам приборов относятся относительно малые точность и чувствительность.

Рис. 3,5. Измерительный механизм электромагнитного логометра

Рис. 3.6. Схема устройства электродинамического измерительного механизма
Электродинамические измерительные механизмы. В электродинамических измерительных механизмах вращающий момент возникает в результате взаимодействия магнитных полей неподвижной и подвижной катушек с токами (рис. 3.6).
Неподвижная катушка 1 обычно состоит из двух одинаковых частей, разделенных воздушным зазором. От расстояния между катушками зависит до некоторой степени конфигурация магнитного поля, что, как увидим далее, влияет на характер шкалы. Неподвижные катушки изготовляют из медного провода намоткой его на изоляционный каркас. Подвижная катушка 2 выполняется обычно бескаркасной из медного или алюминиевого провода. Для включения обмотки подвижной катушки в цепь измеряемого тока используются пружинки или растяжки.
Собственное магнитное поле электродинамических измерительных механизмов невелико, поэтому для защиты от влияния внешних полей применяются экранирование и астазирование.
Нужная степень успокоения обеспечивается воздушным или магнитоиндукционным успокоителем.
При наличии тока в обмотках катушек измерительного механизма возникают силы, стремящиеся повернуть подвижную часть так, чтобы магнитные потоки неподвижных и подвижных катушек совпади (рис 3.6).
Определим вращающий момент электродинамического, измерительного механизма. Электромагнитная энергия двух контуров с токами
![]()
где L1 и L2 – индуктивности неподвижных и подвижных катушек; М1,2 – взаимная индуктивность между ними.
Индуктивности катушек не зависят от угла поворота, поэтому
![]() (3.12)
(3.12)
Если противодействующий момент создается упругими элементами, то для режима установившегося отклонения получим
![]()
откуда
![]() (3.13)
(3.13)
Из уравнения (3.13) следует:
1. При одновременном изменении направлений токов I1 и I2 знак угла отклонения не меняется. Поэтому приборы электродинамической системы могут применяться для измерений в цепях как переменного, так и постоянного тока.
2. Характер шкалы прибора зависит от
произведения токов и от закона изменения
взаимной индуктивности между неподвижными
и подвижными катушками, т. е. от формы
катушек и их взаимного расположения.
Меняя зависимость
![]() от α, можно несколько
от α, можно несколько
улучшить шкалу, однако полностью равномерной для амперметров и вольтметров ее сделать не удается. Уравнение (3.13) является общим для разных конструкций электродинамических измерительных механизмов.
Перейдем к рассмотрению случая включения измерительного механизма в цепь переменного тока. Пусть по катушкам протекают 'токи, сдвинутые по фазе на угол ψ:
![]()
Мгновенное значение вращающего момента
![]() (3.14)
(3.14)
Из-за своей инерции подвижная часть не успевает следовать за мгновенными изменениями момента, а реагирует на среднее значение его, определяемое как
 (3.15)
(3.15)
Выражение (3.15) показывает, что при включении электродинамического измерительного механизма в цепь переменного тока вращающий момент, а следовательно, и угол отклонения, определяются произведением действующих значений токов в обмотках на косинус угла между ними
Для создания вращающего момента в электродинамических измерительных механизмах не используются ферромагнитные и вообще металлические элементы. Момент создается магнитными потоками, действующими в воздухе. Это исключает возможность возникновения различного рода погрешностей, связанных с появлением вихревых токов, гистерезисом и т. п. Поэтому электродинамические приборы могут быть выполнены одними из самых точных среди приборов, применяемых в настоящее время на переменном токе.
Электродинамические приборы изготовляются главным образом в виде переносных приборов высокой точности – классов 0,1; 0,2 и 0,5. В качестве щитовых электродинамические приборы почти не применяются. Недостатком электродинамических приборов является большое потребление мощности. Следует отметить, что чем меньше потребление мощности электродинамическим прибором, тем слабее собственные магнитные поля и сильнее влияние внешних магнитных полей. Такие приборы требуют хорошей защиты от внешних магнитных полей, отличаются достаточно сложной конструкцией и сравнительно высокой стоимостью изготовления. Электродинамические приборы плохо переносят механические воздействия – удары, тряску и вибрацию.
Электродинамические приборы могут быть использованы для измерений в цепях постоянного и переменного тока до частот 2000 – 3000 Гц, а в области расширенного значения частот – до 10 000– 20 000 Гц.
В настоящее время применяются электродинамичесские амперметры, вольметры, ваттметры, а при исполнении измерительных маханизмов в виде логометров – фазометры, частотомеры и фарадметры.
Устройство электродинамического логометра показано на рис. 3.7. Его подвижная часть состоит из двух жестко скрепленных между собой под углом γ подвижных катушек Б1 и Б2, находящихся в поле неподвижных катушек А. Катушки Б1 и Б2 посредством безмоментных токоподводов включаются в цепь по схеме, зависящей от назначения прибора. Из рассмотрения направления действия сил (рис. 3.7) следует, что момент М1 создается составляющей F1 cos α, а момент M2 – составляющей F2 cos (γ – α).
На основании этого, а также из формулы (3.15) средние значения моментов М1 и М2 за период:

где I – ток в последовательно и согласно включенных катушках A; I1 и I2 – токи в катушках Б1 и Б2.
Для установившегося равновесия M1 и M2. Если катушки выполнены так, что

то
 (3.16)
(3.16)
и
 (3.17)
(3.17)

Рис. 3.7. Электродинамический логометр
В самопишущих приборах, а также в приборах, предназначенных для работы в условиях вибраций, тряски и ударов, находят применение ферродинямические измерительные механизмы, отличающиеся от рассмотренных электродинамических измерительных механизмов тем, что у них неподвижные катушки расположены на сердечнике из ферромагнитного материала. Это приводит к значительному увеличению вращающего момента и уменьшению влияния внешних магнитных полей. Однако наличие в измерительном механизме нелинейного элемента (магнитопровода) снижает точность приборов. И ферродинамических измерительных механизмах (рис. 3.8) сердечники набираются из пластин, которые выполняются из электротехнических сталей или из пермаллоев. Для уменьшения погрешностей от вихревых токов пластины изолируются Друг от друга. Из тех же соображений подвижные катушки выполняются бескаркасными. Для успокоения в большинстве случаев применяются магнитоиндукционные успокоители.

Рис. 3.8. Ферродинамические измерительные механизмы
Вращающий момент ферродинамического измерительного механизма возникает в результате взаимодействия подвижной катушки с током и потока, создаваемого неподвижными катушками. Если магнитное поле в воздушном зазоре радиально, то для определения мгновенного значения вращающего момента Mt можно воспользоваться выражением (3.6). При этом будем иметь
![]()
где Вt – мгновенное зна–механизмы чение магнитной индукции в воздушном зазоре; s2,
ω2, i2 – соответственно площадь, число витков и ток подвижной катушки.
Из–за своей инерции подвижная часть будет реагировать на среднее значение момента
![]() (3.18)
(3.18)
где В и I2 – действующие значения соответственно индукции в воздушном зазоре и тока в подвижной катушке.
Если допустить, что при работе используется линейный участок кривой намагничивания материала сердечника, то можно написать
![]()
![]()
где k1 – коэффициент, зависящий от выбора системы единиц и конструктивных параметров измерительного механизма.
Подставляя полученное для В значение в выражение (3.18) и пренебрегая углом потерь, т. е. считая, что < (В, I2) = < (I1, I2), получим
![]()
Если противодействующий момент создается при помощи упругих элементов, то для режима статического равновесия
![]()
откуда
![]() (3.19)
(3.19)
где k – коэффициент, определяемый конструкцией измерительного механизма и выбором системы единиц.
Ферродинамические приборы используются чаще всего как стационарные, относительно малоточные приборы (классов точности 1,5 и 2,5) для измерений в цепях переменного тока с частотой 10 Гц – 1,5 кГц. Однако надо отметить, что применение пермаллоя для сердечников и высокая культура технологии производства позволили создать переносные ферродинамические приборы высокой точности (класса 0,5), предназначенные для измерений в цепях переменного и постоянного тока.
Все же применение ферродинамических приборов для измерений в цепях постоянного тока следует считать пока исключением, и поэтому дальнейшем будем рассматривать их работу только в цепях переменного тока.
Электростатические измерительные механизмы. В электростатических измерительных механизмах вращающий момент возникает в результате взаимодействия двух систем заряженных проводников, одна из которых является подвижной. Из принципа работы электростатических измерительных механизмов следует, что непосредственно они могут измерять только напряжение, т.е. применяться в вольтметрах. В электростатических измерительных механизмах отклонение подвижной части связано с изменением емкости. В настоящее время практическое применение находят электростатические механизмы, в которых изменение емкости происходит или вследствие изменения активной площади пластин или при изменении расстояния между пластинами. Первьй тип механизмов используется главным образом для создания вольтметров на низкие напряжения (в десятки и сотни вольт), a второй – для киловольтметров.
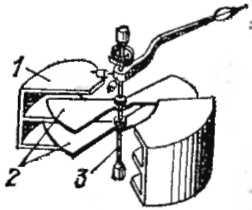
Рис. 3.9. Электростатический измерительный механизм с изменяющейся активной площадью электродов
Неподвижная часть этих механизмов с изменяющейся активной площадью пластин (рис. 3.9) состоит из одной, двух или большего числа камер 1. Увеличивая число камер, можно повысить чувствительность. Каждая камера представляет собой две металлические пластины с воздушным зазором между ними. В зазоры свободно входят тонкие алюминиевые пластины 2 подвижной части. Если к подвижным и неподвижным пластинам подвести измеряемое напряжение, то они окажутся заряженными противоположными по знаку зарядами, в результате чего под действием электростатических сил притяжения подвижные пластины будут стремиться войти внутрь камер. Поворот подвижных пластин, жестко укрепленных на оси 3, вызовет закручивание упругих элементов (обычно растяжек), создающих противодействующий момент. При равенстве вращающего и противодействующего моментов подвижная часть остановится, и по положению указателя на шкале можно будет определить измеряемое напряжение.
Электростатический измерительный механизм с изменением расстояния между электродами (рис. 3.10) состоит из двух неподвижных пластин (электродов) 1, между которыми подвешена на тонких металлических ленточках 2 подвижная пластина 3. Подвижный электрод электрически соединен с одной из неподвижных пластин и изолирован от другой. При наличии между электродами разности потенциалов подвижная пластина отталкивается от одноименно заряженной неподвижной пластины и притягивается к пластине с зарядом противоположного знака. Следует отметить, что направление перемещения пластины 3 не зависит от знака напряжения U. Перемещение подвижной пластины посредством тяги 7 и мостика 4 передается на ось 6 и стрелку 5. Противодействующий момент в рассматриваемом механизме создается весом подвижной пластины. Это требует установки прибора в такое положение, чтобы при отсутствии напряжения стрелка стояла на нулевой отметке.

Рис. 3.10. Электростатический измерительный механизм с изменением расстояния между электродами.
На показания электростатических приборов почти не влияют частота измеряемого няпряжения, изменения температуры окружающего воздуха и посторонние магнитные поля. Зато в очень сильной степени сказывается действие электрических полей. Вращающий момент, действующий на подвижную часть, имеет небольшое значение. Собственное потребление приборов мало; на постоянном токе оно равно нулю.
Эти свойства определяют области применения электростатических вольтметров и особенности их конструкции.
Электростатические вольтметры используются для измерения напряжений в широком диапазоне частот (20 Гц–30 МГц) в маломощных цепях, а также в цепях высокого напряжения для измерения напряжений до десятков и сотен киловольт без применения громоздких, дорогих и потребляющих большую мощность добавочных сопротивлений. По точности эти приборы соответствуют чаще всего классам 1,0 – 1,5 – 2,5. Однако они могут быть выполнены и очень точными – класса 0,1 даже 0,05.
Для уменьшения влияния внешних электрических, полей применяется электростатическое экранирование. Экран соединяется с одним из зажимов прибора, который при измерениях заземляется. Ввиду малого значения вращающего момента в большинстве случаев подвижная часть электростатических приборов укрепляется на растяжках и применяется световой отсчет.
Выражение для угла отклонения подвижной части электростатического измерительного механизма может быть получено на основании следующих рассуждений.
Энергия электрического поля системы заряженных тел
![]()
где С – емкость системы заряженных тел; U – напряжение, приложенное к ним.
На основании выражения для вращающего момента (3.1) получим
![]()
Если противодействующий момент создается при помощи упругих элементов, то для режима установившегося равновесия
![]()
откуда
![]() (3.20)
(3.20)
Из выражения (3.20) следует, что электростатические вольтметры могут применяться для измерений в цепях постоянного и переменного тока, так как при, изменении полярности напряжения U направление отклонения подвижной части не меняется.
При линейном приросте емкости, т.е. при
![]() ,
электростатический вольтметр имел
бы квадратичную шкалу. Для приближения
характера шкалы к равномерному выбирают
соответствующим образом форму подвижных
и неподвижных пластин, т. е. задаются
определенным законом изменения емкости
с изменением угла поворота. Этот
способ позволяет получить практически
равномерную шкалу на участке от 15–25 до
100% ее диапазона показаний.
,
электростатический вольтметр имел
бы квадратичную шкалу. Для приближения
характера шкалы к равномерному выбирают
соответствующим образом форму подвижных
и неподвижных пластин, т. е. задаются
определенным законом изменения емкости
с изменением угла поворота. Этот
способ позволяет получить практически
равномерную шкалу на участке от 15–25 до
100% ее диапазона показаний.
Индукционные измерительные механизмы. Индукционный измерительный механизм состоит из одного или нескольких неподвижных электромагнитов и подвижной части, выполненной обычно в виде алюминиевого диска.
Переменные магнитные потоки, направленные перпендикулярно плоскости диска, пронизывая последний, индуктируют, в нем вихревые токи. Взаимодействие магнитных потоков с токами в диске вызывает перемещение подвижной части.
Индукционные измерительные механизмы по устройству делятся на несколько типов. По числу потоков, пересекающих подвижную часть, они могут быть однопоточными и многопоточными.
Однопоточные измерительные механизмы имеют один электромагнит и подвижную часть в виде диска, асимметрично расположенного на оси. Такие механизмы, хотя и просты по устройству, но в измерительной технике в настоящее время не применяются из-за малости вращающего момента.
Многопоточные индукционные измерительные механизмы делятся на два типа – механизмы с бегущим магнитным полем и механизмы с вращающимся полем. В первых поток (амплитудное значение) в зависимости от времени перемещается поступательно от полюса к полюсу. В механизмах с вращающимся полем этот поток перемещается по окружности или по эллипсу.
Теорию многопоточных измерительных механизмов рассмотрим применительно к двухпоточному прибору (рис. 3.11, с).
Потоки Ф1 и Ф2 в сердечниках 1 и 2, возбуждаемые токами I1 и I2 и сдвинутые по фазе на угол ψ, пересекая диск 3, индуктируют в нем э. д. с. Е1 и Е2 отстающие от своих потоков на угол π/2 (рис, 3.11, б).
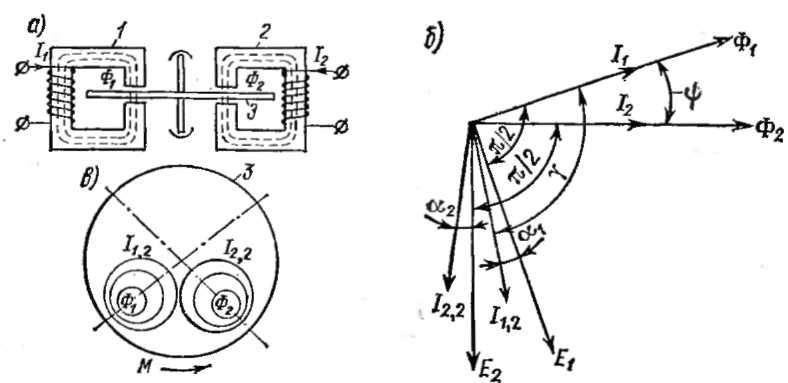
Рис. 3.11. Индукционный двухпоточный измерительный механизм: а – устройство; б – векторная диаграмма; в – диск со следами потоков и контурами токов
Токи I1,2 и I2,2 в диске будут отставать от э. д. с. Е1 и Е2 на углы α1 и α2, если диск кроме активного сопротивления обладает некоторой индуктивностью. Потоки Ф1 и Ф2, пронизывающие диск 3, а также токи I1,2 и I2,2 в диске показаны на рис. 3.11, в в виде окружностей.
Выражение для вращающего момента индукционного механизма можно получить из уравнения (3.1) для момента измерительных механизмов. Однако значительно проще это сделать, пользуясь известным соотношением, определяющим взаимодействие магнитного потока и тока.
Мгновенное значение момента Щ от взаимодействия потока и потока, созданного током i1,2 в диске,
![]()
где с – коэффициент пропорциональности.
Если
![]()
то
![]()
Ввиду относительно большого момента инерции подвижной части измерительного механизма ее движение будет определяться средним значением вращающего момента М за период переменного тока, т. е.

В первом приближении можно считать, что индуктивное сопротивление диска
мало сравнению с его активным
сопротивлением, т. е. α ≈ 0 и
![]() .
В этом случае вращающие моменты от
взаимодействия потока Ф1
и тока I1,2,
а также потока Ф2
и тока I2,2
практически равны нулю.
.
В этом случае вращающие моменты от
взаимодействия потока Ф1
и тока I1,2,
а также потока Ф2
и тока I2,2
практически равны нулю.
Определим значение вращающих моментов от взаимодействия потока Ф1 тока I2,2. потока Ф2 и тока I2,2. Для этого воспользуемся формулой (3.21). Предположим, что углы α1 ≈ α2 ≈0, т. е. индуктивностью диска пренебрегаем:

Из выражений (3.22) и (3.23) видно, что моменты имеют различные знаки и, казалось бы, действие их на подвижную часть будет противоположно. Однако оба момента будут действовать на подвижную часть в одну сторону, что можно доказать, основываясь на физических процессах, происходящих в измерительном механизме. Действительно, взаимодействие потока и тока в диске, который имеет возможность перемещаться, сводится к втягиванию в магнитное поле полюсов или выталкиванию из него диска с контуром тока.
Различие знаков у моментов М1 и М2 указывает на то, что один контур тока втягивается в поле, а другой – выталкивается из соответствующего поля. Следовательно, оба момента М1 и М2 совпадают по направлению и будут перемещать диск в одну сторону. Для определения направления результирующего момента можно воспользоваться правилом, по которому сила взаимодействия магнитного потока и тока или момент направлены от опережающего по фазе потока к отстающему (рис. 3.11, б). В данном случае опережающий по фазе поток Ф1 расположен слева от потока Ф2, поэтому направление моментов М1 и М2 будет слева направо, т. е. подвижная часть будет перемещаться в направлении, указанном стрелкой (рис. 3.11, е).
Таким образом, моменты М1 и М2, несмотря на разные знаки в уравнениях (3.22) и (3.23), будут совпадать по направлению. Поэтому для результирующего момента М, действующего на подвижную часть, можно написать:
![]()
При однородном строении диска, а также при синусоидальном характере изменения потоков можно допустить, что вихревые токи связаны с порождающими их потоками зависимостью
![]()
где f – частота изменения потоков; с3 и с4 – коэффициенты пропорциональности. Тогда результирующий момент будет
![]()
где с = с2с3 + c1c4.
Выражение (3.24) для М является общим для всех многопоточных индукционных измерительных механизмов.
Проведенный анализ показывает следующее:
1) для создания вращающего момента необходимо иметь не менее двух переменных магнитных потоков или двух составляющих одного потока, сдвинутых по фазе и смещенных в пространстве;
2) вращающий момент достигает своего максимального значения, если сдвиг по фазе между потоками равен 90°;
3) вращающий момент зависит от частоты тока.
В настоящее время выпускаются электромеханические приборы типа АСК, Предназначенные не только для измерения, но и для сигнализации изменений измеряемых величин, а также для управления различными объектами. Приборы типа АСК – узкопрофильные приборы, получившие свое название от формы лицевой панели (наличника), имеющей вид прямоугольника, с одинаковой для всех приборов АСК высотой (30 мм) и с несколькими стандартными размерами по ширине (100, 160 или 240 мм); размер по глубине – 180–300 мм. Таким образом, прибор оформлен в корпусе, имеющем форму плоской кассеты, с плоской шкалой и со световым указателем.
При приблизительно равной длине шкалы приборы АСК занимают на щитах в 3–5 раз меньшую площадь по сравнению с приборами обычного исполнения (с круглыми или квадратными лицевыми панелями). Для повышения информативности приборы АСК снабжены двумя цветными светофильтрами (слева – зеленый, справа – красный). Светофильтры располагаются за шкалой таким образом, чтобы световой указатель при выходе значения измеряемой величины за установленные пределы изменял свой цвет. Это существенно облегчает наблюдение за показаниями приборов, так как оператору достаточно взглянуть на группу приборов, чтобы заметить, какие параметры отклонились от нормы.
Приборы АСК снабжены фоторезисторами, механически связанными со светофильтрами. При выходе светового указателя за установленное значение, фоторезистор засвечивается, его сопротивление уменьшается, ток в цепи управления возрастает, что используется для переключения цепей регулирования.

Рис. 3.12. Прибор АСК
Объединение нескольких узкопрофильных приборов в один корпус позволило создать многоканальные и многошкальные приборы АСК. Многоканальные приборы занимают в два раза меньшую площадь щита, чем равное по числу каналов количество узкопрофильных приборов. Многошкальные приборы посредством специального механизма позволяют переключать световой указатель с одной шкалы на другую одновременно с переключением измеряемого параметра.
В комплект АСК входят: амперметры и вольтметры постоянного и переменного тока, частотомеры и приборы, работающие в комплекте с термометрами сопротивления или с термопарами и др.
На рис. 3.12 показан внешний вид двенадцатиканального прибора АСК (на двенадцать измеряемых величин). Из рисунка ясно видно удобство контролирования всех измеряемых параметров одновременно.
Работа по созданию комплекса приборов АСК была удостоена Государственной премии СССР в 1978 г.