

4.2 Командно – измерительные системы. Основные требования, предъявляемые к кис
КИС представляют собой системы для обеспечения контроля передачи команд и осуществление различного вида измерений на самом спутнике и аппаратуре ретрансляторов.
К КИС предъявляют ряд требований не свойственных системам спутниковой связи, но существенно влияющих на их построение.
-
KИС должны обеспечивать управление ИСЗ в различных режимах его полета:
- при установке в расчетную точку орбиты и функционировании на орбите,
- при ориентированном и неориентированном положении ИСЗ,
- в штатном режиме,
- при возникновении на ИСЗ нештатных и аварийных ситуаций.
-
Источники передаваемой по радиолиниям KИC информации находятся как на борту ИСЗ, так и на Земле (в ЦУП), в то время как для системы связи ИСЗ является лишь ретранслятором информации от земных станций.
-
Радиолинии КИС должны совмещать передачу информации с проведением измерений текущих навигационных параметров.
-
КИС должны обеспечивать повышенную достоверность передаваемой на ИСЗ информации с обязательным квитированием факта ее прохождения, поскольку выдача несанкционированной команды (трансформация команды) или пропуск команды могут привести к серьезным, а иногда и непоправимым последствиям.
-
Объем передаваемой по радиолиниям КИС информации относительно мал.
-
В отечественной практике КИС работают со спутниками связи сеансами.
КИС по классификации Международного союза электросвязи относятся, к службе космической эксплуатации.
В 1992 г. ВАКР на первичной основе для этой службы распределила полосы частот: 2025…2110 МГц в направлении Земля - Космос и 2200…2290 МГц в направлении Космос-Земля.
При штатной эксплуатации управление спутниками связи рекомендуется осуществлять в диапазоне используемой целевой (связной) радиолинией этого ИСЗ.
Обобщенная функциональная схема кис, принцип работы
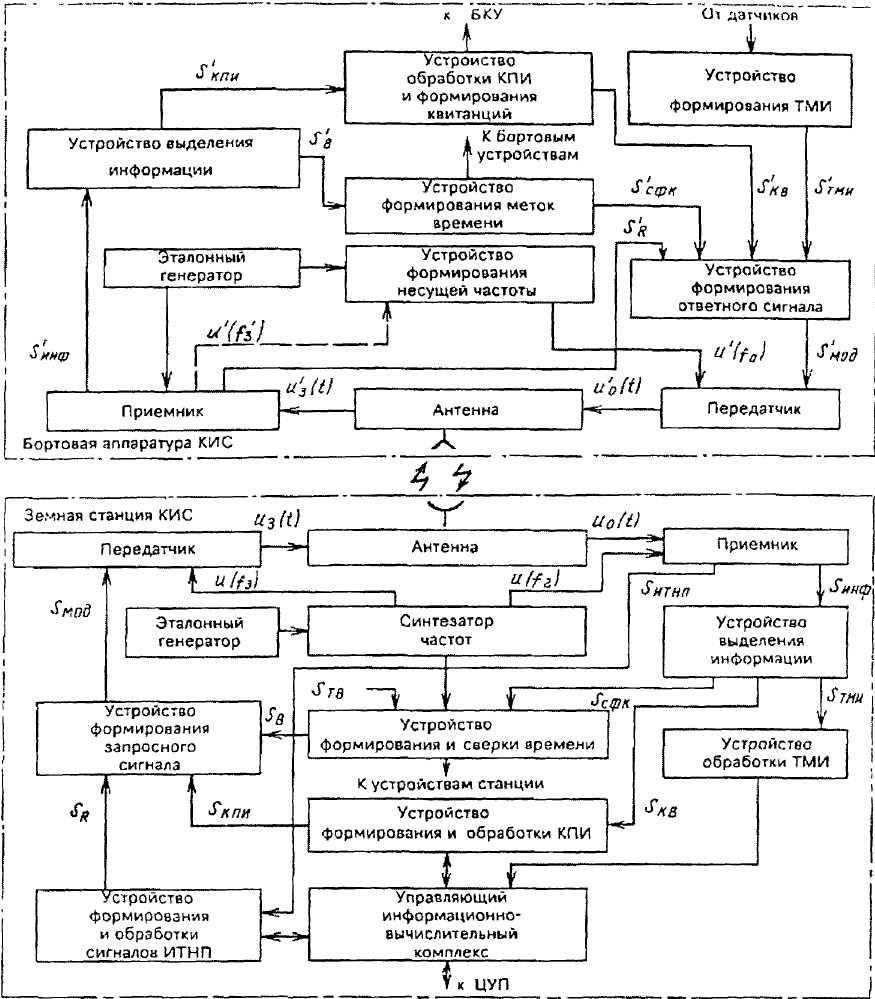
Рисунок 4.1 Обобщенная функциональная схема KИС
Функциональный состав ЗС и бортовой аппаратуры во многом аналогичны. Каждый комплект включает в себя: антенны, приемники, передатчики, эталонные генераторы, устройства выделения информации, устройства формирования запросного (ответного) сигнала, синтезатор частот в ЗС и устройство формирования несущей частоты ответного сигнала в бортовой аппаратуре.
В соответствии с назначением КИС в ЗС можно выделить устройства формирования и обработки КПИ, обработки ТМИ, формирования и обработки сигналов для измерения текущих навигационных параметров (ИТНП), формирования и сверки времени. В бортовой аппаратуре – предназначенные для решения тех же функциональных задач, соответственно, устройства обработки КПИ и формирования квитанций, формирования ТМИ, формирования меток БШВ. Отметим, что на многих спутниках связи (особенно геостационарных) устройство формирования БШВ не требуется, а в некоторых случаях функции формирования ТМИ выполняются специальной аппаратурой, не входящей в состав КИС.
В состав ЗС входит управляющий информационно-вычислительный комплекс, построенный в современных ΚИС на базе ЭВМ. С его помощью осуществляется автоматизированное управление станцией во время подготовки и проведения сеанса управления с ИСЗ.
Комплекс выполняет необходимые для этого расчеты, в нем хранятся требуемые для работы данные и полученные результаты, с его помощью осуществляется также обмен информацией с ЦУП.
До начала сеанса управления из ЦУП в земную станцию поступают данные, содержащие номер ИСЗ, с которым должен проводиться сеанс, время и программу его проведения. Наличие предварительной информации об орбите ИСЗ позволяет перед началом сеанса рассчитать целеуказания для наведения земных антенн. Априорная информация используется также для прогноза доплеровского смещения частоты в земном синтезаторе и прогноза ожидаемого времени запаздывания сигнала в радиолинии Земля – ИСЗ (ИСЗ – Земля). Приходящая из ЦУП информация либо запоминается в устройстве формирования и обработки КПИ, либо через него в реальном масштабе времени передается на борт.
Земной синтезатор частот из высокостабильного колебания эталонного генератора формирует колебание с несущей частотой fз запросного сигнала, с частотой fг гетеродина приемника, а также ряд высокостабильных колебаний, необходимых для работы других устройств станции. При этом частоты fз и fг изменяются по программе в соответствии с ожидаемым доплеровским смещением частоты. В передатчике несущее колебание модулируется по частоте или фазе низкочастотным сигналом Sмод, образованным в устройстве формирования запросного сигнала из дальномерного сигнала SR, сигналов КПИ Sкпи и сигналов Sв, предназначенных для фазирования и коррекции бортовой шкалы времени. Сформированный для излучения на ИСЗ высокочастотный запросный сигнал поступает на антенну и излучается в направлении ИСЗ.
Принятый земной антенной с ИСЗ ответный сигнал обрабатывается и демодулируется в приемнике.
Низкочастотный сигнал Sинф в устройстве выделения информации декодируется и разделяется на сигналы:
- Sкв – сообщения о результатах прохождения переданной на борт информации КПИ (квитанции),
- Sтмк – телеметрическая информация,
- Sсвк – сообщения о бортовом времени, передаваемые при проведении СФК бортовой шкалы времени.
- Sитип – информация об измеренных текущих навигационных параметрах.
Эти сигналы поступают на соответствующие функциональные устройства, в которых производится их окончательная обработка.
Существуют два способа построения бортовой аппаратуры КИС: с некогерентным и когерентным преобразованием несущей частоты сигнала.
При первом способе несущая частота ответного сигнала f0 формируется непосредственно из частоты бортового эталонного генератора. При втором способе она формируется из частоты принятого запросного сигнала fз и связана с ней коэффициентом преобразования α: f0 = α · fз, где α – простая дробь.
Когерентное преобразование несущей частоты существенно усложняет построение БА КИС, требуя выделения и узкополосную фильтрацию гармонического сигнала с частотой fз. Однако оно позволяет обеспечить высокоточное измерение радиальной скорости ИСЗ запросным доплеровским методом. Кроме того, выделенное колебание несущей частоты может быть использовано в качестве опорного при применении синхронного детектирования сигналов КПИ в БА КИС.
Принятый бортовой антенной сигнал fз усиливается, фильтруется и демодулируется в приемнике. Здесь же выделяется для дальнейшей ретрансляции на Землю дальномерный сигнал SR. Низкочастотный информационный сигнал в устройстве выделения информации декодируется и разделяется на сигналы КПИ и сигналы предназначенные для фазирования и корректирования бортовой шкалы времени. В бортовом передатчике несущее колебание с частотой fо модулируется сигналом, образованным в устройстве формирования ответного сигнала из сигналов квитанций, времени, телеметрии и ответных сигналов дальности.