

Розклад даного вектора за напрямками на прямій, на площині і в просторі
Означення:
Вектор
![]() називається лінійною комбінацією п
векторів
називається лінійною комбінацією п
векторів
![]() ,
де
,
де
![]() - деякі числові множники.
- деякі числові множники.
Вираз
![]() називається розкладом вектора
називається розкладом вектора
![]() за системою векторів
за системою векторів
![]() .
.
Перейдемо до лінійного вираження вектора за напрямком у більш загальній формі: на прямій, на площині, у просторі.
1.
На прямій дано два ненульові і колінеарні
вектори
![]() і
і
![]() , тобто
, тобто
![]() .
Існує таке число
.
Існує таке число
![]() ,
що
,
що
![]() .
.

![]()
2.
На площині дано два не колінеарні вектори
![]() і
і
![]() та вектор
та вектор
![]() ,
що належить тій же площині
,
що належить тій же площині
![]() .
Знайти
розклад вектора
.
Знайти
розклад вектора
![]() за напрямком векторів
за напрямком векторів
![]() і
і
![]() .
.
В
За
відомим із шкільного курсу правилом
паралелограма
![]() ,
,
![]() ,
,
![]() і
і
![]() .
Тоді
.
Тоді
![]() є лінійною комбінацією двох векторів
є лінійною комбінацією двох векторів
![]() і
і
![]() .
.
3.
В просторі задано три не компланарні
вектори
![]() і вектор
і вектор
![]() .
Знайти розклад вектора
.
Знайти розклад вектора
![]() за напрямком векторів
за напрямком векторів
![]() .
.
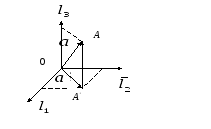
Із
пункту 2 видно, що розклад вектора
![]() на площині векторів
на площині векторів
![]() і
і
![]() має вигляд
має вигляд
![]() .
Із правила паралелограма
.
Із правила паралелограма
![]() ,
а
,
а
![]() .
Тоді
.
Тоді
![]() є лінійною комбінацією трьох векторів
є лінійною комбінацією трьох векторів
![]() .
.
Лінійна залежність і лінійна незалежність системи векторів
Означення:
Система
векторів
![]() називається лінійно залежною, якщо їх
лінійна комбінація дорівнює нульовому
вектору
називається лінійно залежною, якщо їх
лінійна комбінація дорівнює нульовому
вектору
![]() за умови, що хоча б один із коефіцієнтів
за умови, що хоча б один із коефіцієнтів
![]() відмінний від нуля.
відмінний від нуля.
Якщо
система векторів
![]() є лінійно залежною, то хоча б один із
векторів можна подати у вигляді лінійної
комбінації інших. Нехай
є лінійно залежною, то хоча б один із
векторів можна подати у вигляді лінійної
комбінації інших. Нехай
![]() ,
тоді
,
тоді
 ,
або
,
або
![]() .
.
Означення:
Система
векторів
![]() називається лінійно незалежною, якщо
їх лінійна комбінація дорівнює нульовому
вектору
називається лінійно незалежною, якщо
їх лінійна комбінація дорівнює нульовому
вектору
![]() за умови рівності нулю всіх коефіцієнтів
за умови рівності нулю всіх коефіцієнтів
![]() ,
,
![]() .
.
Поняття
лінійної залежності векторів дозволяє
характеризувати їх взаємне положення
у просторі. Так, два вектори залежні
тоді і тільки тоді, коли вони колінеарні.
Три вектори лінійно залежні тоді і
тільки тоді, коли вони компланарні.
Чотири вектори завжди лінійно залежні,
тобто існують числа
![]() такі, що для векторів
такі, що для векторів
![]() має місце розклад вектора
має місце розклад вектора
![]() .
.
Базис
Означення: Система лінійно незалежних векторів простору, за якими можна розкласти довільний вектор, називається базисом цього простору.
Вектори
![]() ,
що утворюють базис, називаються базисними.
,
що утворюють базис, називаються базисними.
Використовуючи вищевикладене можна зробити висновки, що на прямій базисним може бути всякий ненульовий вектор, а на площині утворюють базис будь-які два не колінеарні вектори, а всякий компланарний з ними може бути розкладений у цьому базисі.
Декартова прямокутна система координат
Декартова прямокутна система координат складається з трьох взаємно перпендикулярних осей (Ох – абсцис, Оу – ординат, Оz – аплікат) і точки О – їх перетину та заданого масштабу для вимірювання довжин будь-яких відрізків на площині або у просторі.
Одиничні
вектори
![]() ,
що напрямлені за координатними осями
, називаються ортами, а утворена ними
система (базис) ортонормованим.
,
що напрямлені за координатними осями
, називаються ортами, а утворена ними
система (базис) ортонормованим.
![]()
Розміщення
точки
![]() в декартовій системі координат:
в декартовій системі координат:
1)
![]() ,
тоді точка М
належить
площині yOz;
,
тоді точка М
належить
площині yOz;
2)
![]() ,
тоді точка М
належить
площині хOz;
,
тоді точка М
належить
площині хOz;
3)
![]() ,
тоді точка М
належить
площині хOу;
,
тоді точка М
належить
площині хOу;
4)
![]() ,
тоді точка М
належить
осі Oz;
,
тоді точка М
належить
осі Oz;
5)
![]() ,
тоді точка М
належить
осі Oх;
,
тоді точка М
належить
осі Oх;
6)
![]() ,
тоді точка М
належить
осі Oу.
,
тоді точка М
належить
осі Oу.

Координатами
![]() вектора
вектора
![]() називаються його проекції на координатні
осі Ох,
Оу, Оz
і
записують
називаються його проекції на координатні
осі Ох,
Оу, Оz
і
записують
![]() .
.
Координати
вектора є його коефіцієнтами при розкладі
вектора за ортами
![]() .
.
Координати
визначають вектор. У рівних векторів
рівні відповідні координати, тобто якщо
дано вектори
![]() і
і
![]() ,
причому
,
причому
![]() ,
тоді
,
тоді
![]() .
.
Вектор
![]() ,
що напрямлений із початку координат до
точки
,
що напрямлений із початку координат до
точки
![]() називається радіус-вектором точки
називається радіус-вектором точки
![]() і має розклад
і має розклад
![]() .
.
Якщо
вектор
![]() задано за допомогою координат точок
його початку і кінця
задано за допомогою координат точок
його початку і кінця
![]() і
і
![]() одержуються за допомогою віднімання
від координат кінця відповідних координат
початку
одержуються за допомогою віднімання
від координат кінця відповідних координат
початку
![]() .
.