

4. Детали на валах и осях (Рис. 8, 9, 10).

а) б) в) г) д)
Рис. 8 – Основные типы деталей:
а) гильза (ℓ/d > 5); б) втулка (ℓ /d ≤ 5); в) диск (ℓ/d ≤ 1); г) блок; д) «конус» колес.

а) б) в) г) д) е)
Рис. 9– Круглые колеса (r = const (= 0,5d); ℓ = const), основные типы:
а) маховик; б) шкив; в) звездочка; г) шестерни; д) шестерня-муфта; е) полумуфта.

а) б)
Рис. 10 – Некруглые колеса (кулачки):
а) дисковые (r ≠ const); б) цилиндрические (1 и 2 профильные ℓ ≠ const).







Рис. 11 – Типы закреплений деталей на валах:
а) подвижное винтовое закрепление (ходовой резьбой)
б) закрепление свободного вращения на валу (или деталь на оси)
в) глухое закрепление детали на валу (шпонкой или штифтом)
г) продольно – подвижное вдоль вала закрепление на скользящей шпонке
д) продольно – подвижное вдоль вала закрепление на шлицах
е) поочередно – выборочное закрепление с валом вытяжной шпонкой (по ГОСТ)
ж) поочередно – выборочное закрепление с валом вытяжной шпонкой (пример конструкции)
5. Жесткие стержни и рычаги.
Они выполняют роль посредников, передающих движение от ведущей детали к ведомой, через шарнирные и другие виды закреплений. Чаще – это стержни с отверстиями на концах. Их делят на типы по геометрической форме траектории движения центров отверстий, и другим признакам (Рис. 12).
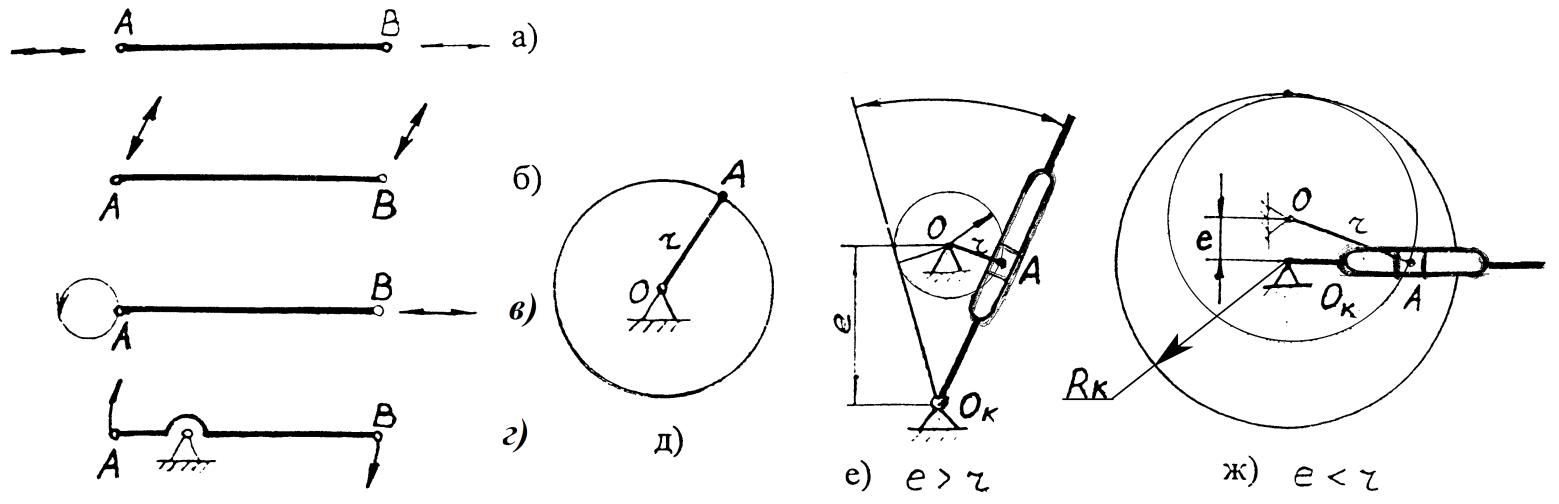
Рис. 12 – Основные типы жестких стержней:
а – шток б – тяга в – шатун г – качалка
д – кривошипный рычаг (или диск) с кр. пальцем
е, ж – кулисный рычаг с кулисным камнем
4. Типовые передачи
4.0 Общие сведения о передачах
|
Передача – техническое устройство из двух твердых тел – деталей (ведущей начальной – Н, и ведомой конечной – К), в котором К получает движение от Н в зоне их непосредственного контакта, или (при значительных расстояниях между Н и К) через гибкую связь (ремень или цепь). При этом оба компонента передачи (Н и К) являются крайними, между которыми нет никаких жестких «посредников». |
Механизм – техническое устройство, где в передаче движения от Н к К принимают участие промежуточные детали (жесткие посредники), количество которых определяет степень сложности этого механизма (она может быть малой, средней, высокой).
Характер контактного взаимодействия компонентов передачи зависит от конструктивных особенностей контактирующих поверхностей и может быть двух видов: трение и зацепление.
-
Трение гладких поверхностей Н и К, сопровождается неизбежным проскальзыванием – пробуксовкой. Если
 и
и
 -
линейные скорости деталей Н и К в зоне
их контакта, то из за пробуксовки
-
линейные скорости деталей Н и К в зоне
их контакта, то из за пробуксовки



(
( -
-
 )
=
)
=

абсолютная
пробуксовка.
абсолютная
пробуксовка.
Отношение
 ;
где С
– коэффициент
жесткости передачи.
;
где С
– коэффициент
жесткости передачи.
Для передач трения:
 =
=
 =
=
 =
=
 =
=

Выражение
 =
=
 –
относительная
пробуксовка,
для передач трения – величина
непостоянная, т.к. зависит от множества
факторов, (
часто
непредсказуема
!
). С учетом этого обстоятельства,
с целью упрощения решения учебных задач
будем считать пробуксовку постоянной
–
относительная
пробуксовка,
для передач трения – величина
непостоянная, т.к. зависит от множества
факторов, (
часто
непредсказуема
!
). С учетом этого обстоятельства,
с целью упрощения решения учебных задач
будем считать пробуксовку постоянной

и тогда коэффициент жесткости для любых передач трения будет постоянным

-
Зацепление негладких поверхностей Н и К (т.е. прочных выступов за прочные впадины) исключает возможность пробуксовки.
Для передач зацепления:



По числу компонентов – валов передачи делят на одно- , двух- и трехваловые. Компонентами передач являются:
-
у одноваловых вал (Вн) и салазки (Ск)
-
у двухваловых – два вала (Вн и Вк)
-
у трехваловых – три соосных вала (Во, В1, В4)
Для ' = 1' (мин): поведение салазок (мм / мин) скорость (средняя)
поведение вала n (об / мин) частота вращения
Стабильные передачи те, для которых отношение скоростей Н и К деталей сохраняется неизменным.
Для одноваловых стабильных передач, где ведомые салазки (Ск) двигаются от ведущего вала (Вн), это отношение – линейная характеристика


Для двухваловых стабильных передач такое отношение – передаточное отношение


Кинематический баланс – это математическое описание поведения компонентов передачи за определенный период ( ' ) ее работы.
Формула кинематического баланса (ФКБ) – это выражение кинематического баланса в буквенной форме.
Если для ' = 1' , то для любого ' ≠ 1'
ФКБ
для одноваловых

× '
ФКБ
для двухваловых


Уравнение кинематического баланса (УКБ) – это ФКБ, переписанная с использованием доступной числовой и количественной информации.