

-
Определённость формы движения ро.
Форма движения РО МРС может быть вращательная (РО – шпиндель) или прямолинейная (РО – ползун, салазки, стол и т.д).
-
Возможность управления работой Пр. с необходимым быстродействием и точностью.
Управление работой Пр. включает в себя ряд процессов, таких как пуск (разгон), изменение направления движения на противоположное (реверс), изменение режима (т.е. скорости) движения, останов (торможение) и др. Каждый из этих процессов характеризуется определённым быстродействием и точностью.
Быстродействие – это отрезок времени от момента подачи управляющего сигнала до момента полной реализации команды, измеряется в секундах.
Точность – это разница между ожидаемым и фактическими положениями РО на финише отдельного регулировочного процесса, измеряется в мм ( например, команды «стоп»).
К каждому Пр. мрс предъявляются определённые требования к возможности осуществления различных управляющих процессов с определёнными параметрами быстродействия и точности.
Если выбранный тип двигателя (с S ≤ 0,1) по своим свойствам не может обеспечить выполнение этих требований, то в состав Пр. дополнительно вводится различные технические устройства (передачи, режимные регуляторы, реверсы, прерыватели, тормозы и др.).
Классификация Пр по разным признакам:
По структурному составу:
-
Элементарные Пр – состоят из И. дв и РО. Например: мотор – шпиндель
-
Простые Пр – в отличии от элементарных, дополнительно имеет механическую передачу
(например, зубчатую), являющуюся посредником между И. дв и РО.
-
Сложные Пр - в отличии от простых, имеют в качестве посредников не одну, а множество различных передач.
При этом приводы различают по степени сложности (малая, средняя, высокая, очень высокая).
По назначению в процессе ФОР:
А) Режимные приводы:
-
Приводы главного движения, быстроходные, для реализации заданного режима

 (м/мин) – скорость резания.
(м/мин) – скорость резания. -
Приводы подач, тихоходные, для реализации другого заданного режима S (мм/цикл) – подача
Б) Приводы взаимосвязанных движений ФО (винтовых траекторий, имитация обката и др.)
В) Приводы вспомогательных движений (ускоренный ход), для реализации холостых ходов
По числу приводимых в действие РО: автономные (единичные) и групповые (коллективные)
По виду энергии, потребляемой двигателем: - электро, - гидро, - пневмо и комбинированные.
По характеру перемещения РО: непрерывные и дискретные
По виду регулирования скорости РО: со ступенчатым регулированием и с плавным регулированием
По уровню скорости РО: тихоходные и быстроходные
3. Типовые детали механических приводов.
Механические приводы (М.Пр.) – совокупность технических устройств, в которых передача движения осуществляется через контактное взаимодействие твердых деталей, входящих в состав этого привода. В М.Пр. нет перехода энергии из одного вида в другой; передаётся только кинетическая энергия, но при этом есть возможность изменять её основные характеристики: геометрические – форма, направление, последовательность и размеры перемещений, кинематические – скорость; динамические – силовые параметры.
Детали, из которых состоит любой М.Пр. по назначению могут быть разделены на следующие основные типы: корпусные детали, салазки, круглые стержни и детали на них, некруглые жесткие стержни и рычаги.
1. Корпусные детали – коробчатой формы с рёбрами жёсткости между отсеками; это могут быть цельные станины (Рис. 3) или части сборных станин. Наиболее ответственные элементы у них: – базовые площадки (для монтажа при сборке); направляющие для салазок (линейные, дуговые, круговые) (Рис. 4); отверстия под подшипники валов и крепежные.

Рис. 3 – профили поперечных сечений: стоек (1-3) и станин балок (4-6)
2. Салазки (Рис. 3) – части станка подвижные по линейным (реже по дуговым) направляющим станин. Характер взаимодействия в зоне контакта – скольжение или качение. Если салазки являются РОи – их называют «суппорт», а если РОз – их называют «стол».
Сложные РО содержат ≥ 2 салазок, поставленных друг на друга, подвижных чаще всего во взаимно – перпендикулярных (координатных) направлениях.
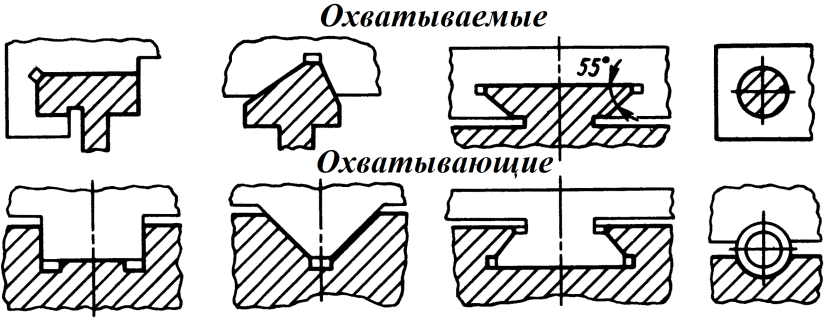

а) скольжения б) качения


в) салазки
Рис. 4 – Направляющие станин и салазки.
3. Круглые стержни – это оси и валы (Рис. 5, 6, 7).
Ось – круглый стержень определяет местоположение в пространстве центра вращения другой, вращающейся детали; сама ось может и не вращаться. Короткая ось – цапфа.
Вал – круглый стержень для передачи вращения (Мкр ≠ 0) от ведущей к ведомой детали (обе закреплены на этом валу).
Опоры валов – подшипники скольжения или качения.
![]()
а) б) в) г)
Рис. 5 – Круглые стержни:
а – ось; б – вал; в – ходовой винт; г – составной вал.
Шпиндель (Рис. 6) – это вал, выполняющий роль РО (для передачи вращения З или РИ ).
![]()
а) б) в) г) д) е)
Рис. 6 – Обозначение шпинделей различных станков:
а) патронных; б) цанговых; в) центровых; г) сверлильных; д) фрезерных; е) шлифовальных.
Составные валы – длинные валы, составленные из нескольких коротких, соединенных нерасцепляемыми муфтами (Рис. 7).

а) б) в) г) д) е)
Рис. 7 – Муфты постоянные (нерасцепляемые):
а) жесткие; б) эластичные в) зубчатые; г) шарнирные; д) плавающие; е) телескопические.