

6.2 Переключаемые регуляторы.
Переключаемые регуляторы – это двухваловые многовариантные передачи с неизменным расположением осей Н и К в которых, для передачи вращения от Вн к Вк предусмотрено несколько передач (до 8) с различными значениями передаточных отношений
(в
пределах
 )
и
многопозиционный продольно-подвижный
переключатель, обеспечивающий возможность
задействовать любую, но только одну из
них.
)
и
многопозиционный продольно-подвижный
переключатель, обеспечивающий возможность
задействовать любую, но только одну из
них.
По конструкции различают следующие основные типы переключателей: (Рис. 32)
1 – управляемые муфты: фрикционные, зубчатые, кулачковые (М)
3 – управляемые шестерни (УШ)
4 – блоки шестерён (Б)
5 – рычаг с накидной шестерней (НР)
6 – вытяжная шпонка (ВШ)
Переключатели трения – это 2 или 3 позиционные (1 или 2 сторонние) фрикционные муфты Мф с очень высоким быстродействием при включении и выключении, но и неизбежной пробуксовкой.
Переключатели зацепления делят на:
– жёсткие, пригодные для использования в любых М. Пр. К ним относятся: подвижные на скользящих шпонках или шлицах блоки шестерён (Б), одиночные управляемые шестерни (УШ), муфты-шестерни (МШ) и кулачковые муфты (Мк). Их главный недостаток – низкое быстродействие при включении, т.к. процесс включения сложен, осуществляется в 3 этапа (1 – предварительная синхоризация, 2 – начало включения до «закусывания» и 3 – «довключение»).
– нежесткие, пригодные для использования только в тихоходных малонагруженных М. Пр: к ним относятся вытяжные шпонки (ВШ) и поворотные рычаги с накидной шестерней (РШ).

Рис. 33 – Основные типы переключаемых регуляторов и переключателей.
6.3 Переналаживаемые регуляторы
Это двухваловые передачи зацепления или трения с неизменным расположением валов Н и К
(т.е.
межцентровое расстояние
 ),
периодически переналаживаемые для
ступенчатого изменения передаточного
отношения
),
периодически переналаживаемые для
ступенчатого изменения передаточного
отношения
 и скорости ведомого вала
и скорости ведомого вала
 .
.
Ременный
регулятор со ступенчатыми шкивами
(Рис.
34).
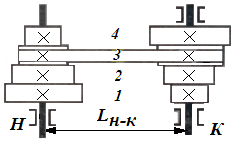
Его переналадка – это переустановка ремня с одной ступени на другую ( а их здесь – четыре ). При этом



![]()





![]()


![]() Чтобы
обходиться одним ремнем без специального
натяжного устройства, необходимо, чтобы
для всех ступеней
Чтобы
обходиться одним ремнем без специального
натяжного устройства, необходимо, чтобы
для всех ступеней
 Рис.
34 – Ременный регулятор со
Рис.
34 – Ременный регулятор со
ступенчатыми шкавами
Переналадка шестеренных регуляторов – это разборка, замена шестерен и последующая сборка, процесс с низким быстродействием. Регуляторы с одной сменной шестерней на НР – редки. Чаще встречаются регуляторы с числом сменных зубчатых колес – два и более.
Регулятор
с парносменными шестернями
(Рис
35 )
– переналаживаемая передача
непосредственного зацепления из пары
сменных шестерен
Zн
= А
и Zк
= В
между
параллельными валами Н и К с LН
- К = const







Рис. 35 – Регулятор с парносменными
шестернями




![]()




![]()

![]()
Если А – любая из Zсм , то В = (const – А)