

7.11 Потери и кпд синхронных машин
Преобразование энергии в синхронной машине связано с потерями энергии. Все виды потерь в синхронной машине разделяются на основные и добавочные. Основные потери слагаются, в свою очередь, из электрических потерь в обмотке статора, потерь на возбуждение, магнитных и механических потерь.
Электрические потери в обмотке статора определяются
|
|
(7.12) |
где r1 – активное сопротивление одной фазы обмотки статора.
Потери на возбуждение зависят от типа возбудителя и определяются как:
|
|
(7.13) |
где
![]() =2
В – падение напряжения в щеточном
контакте.
=2
В – падение напряжения в щеточном
контакте.
Магнитные потери происходят в сердечнике статора, который подвергается перемагничиванию вращающимся магнитным полем. Эти потери состоят из потерь на гистерезис и потерь от вихревых токов:
|
|
(7.14) |
Механические потери равны сумме потерь на трение в подшипниках и вентиляцию.
Добавочные потери в синхронных машинах делятся на два вида: пульсационные потери в полюсных наконечниках ротора и потери при нагрузке. Добавочные пульсационные потери Рп в полюсных наконечниках вызваны пульсацией магнитной индукции в зазоре из-за зубчатости внутренней поверхности статора. Добавочные потери при нагрузке Рдоб определяются в процентах (≈0,5%) от подводимой мощности двигателей или от полезной мощности генераторов.
Суммарные потери в синхронной машине
|
|
(7.15) |
Коэффициент полезного действия для синхронного генератора
|
|
(7.16) |
где Рном – активная мощность, отбираемая от генератора при его номинальной нагрузке.
Коэффициент полезного действия для синхронного двигателя
|
|
(7.17) |
7.12 Пуск трехфазного синхронного двигателя
Если обмотка возбуждения неподвижного ротора синхронного двигателя подключена к источнику постоянного тока, то она создает основной магнитный поток, который определяет полярность полюсов ротора (рисунок 7.7). При включении обмотки статора его трехфазная система токов создает вращающийся магнитный поток, частота вращения которого определяется формулой 7.11. При числе пар полюсов р=1 и f=50 Гц частота вращения будет равна n=3000 об/мин. При такой частоте вращения каждую 0,01с меняется полярность статора по осевой линии неподвижного ротора, сила притяжения сменяется силой отталкивания, средний вращающий момент равен нулю и ротор не успеет тронуться с места. Отсутствие пускового момента является большим недостатком синхронных двигателей.
Основными способами пуска в ход синхронных двигателей являются асинхронный пуск и пуск с помощью разгонного двигателя.
Для осуществления асинхронного пуска на роторе синхронного двигателя располагают специальную пусковую обмотку, которая является короткозамкнутой. При подключении обмотки статора к сети создается вращающийся магнитный поток статора. Короткозамкнутая обмотка ротора в результате взаимодействия с вращающимся потоком статора создает асинхронный вращающийся момент, под действием которого ротор трогается с места и разгоняется до частоты вращения, близкой к синхронной частоте. После этого обмотку возбуждения переключают на источник постоянного тока, и полюсы ротора приобретают собственную полярность.
n
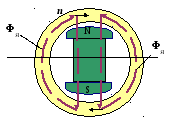
Рисунок 7.7 – Основной магнитный поток синхронного двигателя
При незначительном различии в частотах вращения полюсов статора и ротора разноименные полюсы притягиваются друг к другу, а одноименные – отталкиваются. В результате ротор получает ускорение и после нескольких качаний ротора его частота вращения достигает синхронной и двигатель «втягивается в синхронизм».
Пуск с помощью разгонного двигателя осуществляют только при холостом ходе двигателя. При этом его ротор приводят во вращение разгонным двигателем (асинхронным или постоянного тока). Мощность разгонного двигателя небольшая, необходимая для вращения ротора синхронного двигателя.
С помощью синхроскопа проверяют выполнение условий параллельной работы синхронных машин, и когда они выполнены, статор синхронного двигателя подключают к сети. После этого разгонный двигатель отключают, а синхронный – вращается с синхронной частотой.