

7.6 Рабочие характеристики асинхронного двигателя
Рабочие
характеристики асинхронного двигателя
(рисунок
7.4) представляют
собой зависимости: частоты вращения
n2,
КПД, полезного момента М2,
коэффициента мощности cos
![]() и тока статора
и тока статора![]() от полезной мощности
Р2
при постоянстве питающего напряжения
U1
= const и частоты
f1
= const. При
этом зависимость
от полезной мощности
Р2
при постоянстве питающего напряжения
U1
= const и частоты
f1
= const. При
этом зависимость
![]() называетсяскоростной
характеристикой.
называетсяскоростной
характеристикой.
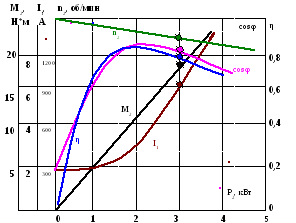
Рисунок 7.4 – Рабочие характеристики асинхронного двигателя
Существует два метода получения данных для построения рабочих характеристик асинхронных двигателей: метод непосредственной нагрузки и косвенный метод. Метод непосредственной нагрузки заключается в опытном исследовании двигателя в диапазоне нагрузок от холостого хода до режима номинальной нагрузки. Этот метод применяется для двигателей мощностью не более 10—15 кВт. Универсальный косвенный метод, применение которого не ограничивается мощностью двигателя. Метод заключается в выполнении двух экспериментов: опыта холостого хода и опыта короткого замыкания. Опыты холостого хода и короткого замыкания асинхронных двигателей аналогичны таким же опытам трансформаторов. Но имеют особенности, обусловленные наличием у двигателя вращающейся части – ротора.
7.7 Регулирование частоты вращения асинхронных двигателей
Частоту вращения ротора асинхронного двигателя можно регулировать изменением скольжения, частоты тока или числа полюсов в обмотке статора.
Регулирование частоты вращения изменением скольжения возможно изменением подводимого к обмотке статора напряжения или активного сопротивления обмотки ротора. Регулировка частоты вращения изменением скольжения происходит только в нагруженном двигателе.
Изменение подводимого напряжения. Увеличение подводимого к двигателю напряжения вызывает рост частоты вращения. Однако диапазон регулирования частоты вращения получается небольшим, так как с превышением номинального напряжения возникает опасность перегрева двигателя, вызванного резким увеличением электрических и магнитных потерь. А с уменьшением напряжения двигатель утрачивает перегрузочную способность, которая пропорциональна квадрату напряжения сети.
Подводимое к двигателю напряжение изменяют или регулировочным автотрансформатором или реакторами, включаемыми в разрыв линейных проводов.
Узкий диапазон регулирования и неэкономичность (необходимость в дополнительных устройствах) ограничивают область применения этого способа регулирования частоты вращения.
Изменение активного сопротивления в цепи ротора. Этот способ регулирования частоты вращения возможен только в двигателях с фазным ротором. Изменение активного сопротивления цепи ротора достигается включением в цепь ротора регулировочного реостата, подобного пусковому реостату, но рассчитанного на длительный режим работы.
В зависимости от конструкции регулировочного реостата этот способ регулирования частоты вращения может быть плавным или ступенчатым. Способ обеспечивает регулирование частоты вращения только в сторону уменьшения синхронной частоты вращения.
Изменение
частоты тока в статоре. Этот
способ регулирования, называемый
«частотное
регулирование»,
основан на изменении синхронной частоты
вращения
![]() .
Для осуществления этого способа
регулирования необходим источник
питания двигателя переменным током с
регулируемой частотой, в качестве
которого применяются электромашинные
или полупроводниковые преобразователи
частоты. Чтобы регулировать частоту
вращения, достаточно изменить частоту
тока
.
Для осуществления этого способа
регулирования необходим источник
питания двигателя переменным током с
регулируемой частотой, в качестве
которого применяются электромашинные
или полупроводниковые преобразователи
частоты. Чтобы регулировать частоту
вращения, достаточно изменить частоту
тока![]() ,
которая влияет на максимальный момент.
Поэтому для сохранения перегрузочной
способности, коэффициента мощности и
КПД двигателя на требуемом уровне
одновременно с изменением частотыf1
необходимо
изменять и напряжение питания.
,
которая влияет на максимальный момент.
Поэтому для сохранения перегрузочной
способности, коэффициента мощности и
КПД двигателя на требуемом уровне
одновременно с изменением частотыf1
необходимо
изменять и напряжение питания.
Частотное регулирование двигателей позволяет плавно изменять частоту вращения в широком диапазоне.
Изменение
числа полюсов обмотки статора. Этот
способ регулирования частоты вращения
дает ступенчатую регулировку. Так, при
![]() и
и![]() пар
полюсов можно получить следующие
синхронные частоты вращения: 3000, 1500,
1000, 750, 600 об/мин.
пар
полюсов можно получить следующие
синхронные частоты вращения: 3000, 1500,
1000, 750, 600 об/мин.
Изменять число полюсов в обмотке статора можно или укладкой на статоре двух обмоток с разным числом полюсов, или укладкой на статоре одной обмотки, конструкция которой позволяет путем переключения катушечных групп получать различное число полюсов. Последний способ получил наибольшее распространение.
Регулирование частоты вращения изменением числа полюсов на статоре применяют исключительно в асинхронных двигателях c короткозамкнутым ротором, т. к. число полюсов в обмотке этого ротора всегда равно числу полюсов статора и для изменения частоты вращения достаточно изменить число полюсов в обмотке статора.