

Turanov_Bondarenko_Vlasova_Kreplenie_gruzov_v_vagonakh
.pdfRt называется силой трения Fтр и всегда направлена в сторону, противополож- ную действительному или возможному движению тела. Полная реакция сявзи R, равна геометрической сумме нормальной Rn и касательной составляющих Rt. Она отклонена от нормали к опорной поверхности на некоторый угол ϕтр. Силы трения возникают при взаимодействии тела с реальными связями.
4. Гибкая связь, осуществляемая гибкими нерастяжимыми элементами креплений (отожженная проволока (см. рис.1.3,б и 1.4), нить, трос или канат, цепь и т.п.) (рис.1.9). На рис.1.9,а гибкая связь представлена в виде троса, на рис.1.9,а - в виде растяжек, а на рис.1.9,в − в виде каната, перекинутого через подвижную и неподвижную блоки.
Рис. 1.9. Примеры применение гибких связей
Гибкие связи не дают телу удаляться от точки подвеса нити по ее направ- лению. Поэтому реакции гибких связей R, R1 и R2 направлены вдоль связей к точке ее подвеса.
Примером применение каната, перекинутого через подвижную и непод-
вижную блоки, являются компенсированные контактные подвески с регулиро- ванием натяжения контактных проводов и несущего троса.
Утверждение 2. Гибкая связь может работать только на растяжение.
5. Связь в виде жесткого прямого стержня с шарнирным закреплением концов (рис.1.10). Здесь реакции R1, R2 и R3 всегда направлены вдоль осей стержней (рис.1.10,б). Стержни при этом могут быть как растянутыми, так и сжатыми.
Рис. 1.10. Связь в виде жесткого прямого стержня
с шарнирным закреплением концов
30

6. Связь, осуществляемая ребром двугранного угла или точечной опорой
(рис.1.11). Реакции таких связей R1 и R2 направлены перпендикулярно к по- верхности опирающегося тела (рис.1.11,б).
Рис. 1.11. Связь, осуществляемая ребром двугранного угла или точечной опорой
7. Связь, осуществляемая в виде шарнирно-неподвижной (А) и шарнирно- подвижной (В) опор (рис.1.12).
Рис. 1.12. Связь, осуществляемая в виде шарнирно-неподвижной и шарнирно-подвижной опор
Проекции реакции RAx и RAy в опоре А перпендикулярно и направлены вдоль оси балки (рис.1.12,б), если на балку действует плоская система сил. Реакция RB в связи В направлена только перпендикулярно плоскости расположения опоры (рис.1.12,б), независимо от направления действия плоской системы сил.
В случае, если на балку действуют пространственные системы сил, то в шарнирно-неподвижной опоре А возникают три реакции связей (Rx, Ry и Rz), направленных вдоль этих осей. В шарнирно-подвижной опоре В всегда возникает одна реакция связи RB, направленная перпендикулярно плоскости расположения опоры.
8.Связь, осуществляемая в виде жесткой заделки (защемление) (рис.1.13). Реакции в таких связях Rx, Rz
иMy направлены вдоль и перпендикулярно оси балки (рис.1.13,б), если на балку действует плоская система сил.
Рис. 1.13. Связь, осуществляемая в виде жесткой заделки
В случае, если на балку действуют пространственные системы сил, то в за- делке возникают шесть реакции связей (Rx, Ry, Rz и Mx, My, Mz ), направленных вдоль и вокруг этих осей.
9. Связь в виде цилиндрического шарнира (подшипники качения и скольже-
ния) (рис.1.14).
31

Цилиндрический шарнир (просто шарнир) осуществля- ет такое соединение двух тел (B и K), при котором одно те- ло (B) может вращаться относительно другого (K) вокруг общей оси Az, называемой осью шарнира.
Рис. 1.14. Связь в виде цилиндрического
шарнира
Шарнир А еще и допускает перемещение тело B относительно тело K вдоль оси Az. Поэтому такой шарнир является двухподвижным.
В шарнире реакция связи R может иметь любое направление в плоскости, перпендикулярной оси шарнира, т. е. в плоскости Аху. Здесь неизвестными яв- ляются модуль и направление (угол α) реакции связи R.
На практике такой шарнир использован в соединение поворотной стрелы (тело В) с корпусом стрелового крана (тело K) на железнодорожном ходу
(рис.1.15).
Рис.1.15. Пример применение шарнирной связи в стреловом кране: 1 - поворотная стрела; 2. и 3 - неподвижный и подвижный блоки; 4 и 6 - канаты; 5 - рабочий барабан, соединенный с валом
электродвигателя подъема груза; 7 - рабочий барабан, соединенный
свалом электродвигателя подъема и опускания поворотной стрелы
9.Связь в виде сферического шарнира (рис.1.16).
Рис. 1.16. Связь в виде сферического шарнира
32

Тела, соединенные сферическим шарниром, могут как угодно поворачи- ваться одно относительно другого вокруг центра шарнира А. Поэтому такой шарнир является трехподвижным. Следовательно, реакция R сферического шарнира может иметь любое направление в пространстве. Для такой реакции неизвестными являются модуль и направление относительно оси координат, т. е. углы α, β и ϕ реакции R с осями Аxyz.
Примером применение на практике такого шарнира служат соединения турникетных опор для перевозки длинномерного груза и подвески передних колес к корпусу автомобиля.
1.2.3.1. Принцип освобождаемости от связей
Principle clear constraints
Несвободное твердое тело можно рассматривать как свободное, если мыс- ленно освободить от связей, заменив действие связей соответствующими реак- циями связей.
Этот принцип дает возможность, в частности, применить к несвободному твердому телу (груз) условия равновесия, справедливые для любого свободного твердого тела. При этом следует, отбросив связи (гибкие элементы креплений и пол вагон), наложенные на твердое тело (груз), заменить их соответствующими реакциями связями. После этого надлежит рассмотреть равновесие этого несво- бодного твердого тела, как тела свободного, под действием активных сил и ре- акций связей.
Все силы, действующие на твердое тело, можно разделить на две группы: силы активные и реакции связей (пассивные силы). При этом активными следу- ет считать все силы, не являющиеся реакциями связей. Таким образом, какая- либо неизвестная сила, не являющаяся реакцией связи, также является активной силой.
Утверждение 3. Активные силы не зависят от связей, а, значит, и от реак- ций связей, наложенных на твердое тело. Реакции же связей зависят от актив- ных сил.
Утверждение 4. В задачах креплений груза на открытом железнодорож- ном подвижном составе величины реакции связей в виде гибких проволок Ri
(i = 1, n , где n − количество гибких элементов креплений груза) и нормальная составляющая реакции связи (пол вагона) N, координаты точки приложения нормальной реакции связи xN и уN, проекции касательной составляющей реак- ции связи (пол вагона) в виде силы трения Fтрх и Fтру подлежат определению из рассмотрения условия равновесия пространственной системы сил, действую- щих на механическую сиcтему «груз – крепление – вагон».
Согласно принципу осбовождаемости от связей, реакции связей N и Ri
(i = 1, n ) полностью заменяют опорную поверхность (пол вагона) и гибкие эле- менты креплений груза. Поэтому на расчетной модели их можно и не показы-
вать (рис.1.17).
33

Рис.1.17. Замена опорной плоскости и гибких элементов креплений груза реакциями связей N и R
На расчетной модели обозначены: вес груза G; динамическая продольная
сила Fпр; динамическая поперечная сила Fп; реакции связей Ri ( i = 1, n , где n - количество гибких элементов креплений груза); нормальная составляющая ре- акции связи N и координаты ее точки приложения xN и уN; силы трения Fтрх и
Fтру.
Примерами расчетных схем также являются модели, показанные на рис.1.9,а1, б1, в1; 1.10б…1.13б, а также на рис. 1.18 (см. рис.1.15).
Рис.1.18. Замена опорной плоскости и гибких элементов креплений груза реакциями связей R (взамен шарнира А) и R6 (взамен натяжение каната 6)
На рис.1.18 неизвестными являются реакции связей R (шарнир А) и R6 (на- тяжение каната 6).
1.2.4. Разложение силы на три составляющие
Resolution of force into third components
При изучении дисциплины “Крепление грузов в вагонах” рассматриваются пространственные произвольные системы сил, приложенные к грузам. При
34
составлении уравнений равновесия таких систем удобно усилия (реакции связи) в гибких элементах креплений разложить по трем заданным направ- лениям, не параллельным одной плоскости (например, по трем взаимно перпендикулярным координатным осям).
Разложение результирующей силы (усилия) на три составляющие состоит в замене одной силы тремя взаимно перпендикулярными силами, эквивалент- ными данной силе.
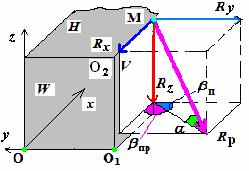
Для этого на основании правил параллелепипеда достаточно построить та- кой параллелепипед, ребра которого имели бы заданные направления, и диаго- налью которого являлось бы данное усилие (рис.1.19).
С этой целью рассмотрим параллелепипед со сторонами: длиной aр, шири- ной bр и высотой hр, касающийся боковой вертикальной поверхности V груза так, чтобы нижняя горизонтальная его поверхность Н совпала с полом вагона, на которой расположены увязочные устройства (или стоечные скобы) вагона, с
помощью которых закрепляют один из концов гибкого элемента крепления (растяжки).
При этом считаем, что одна из диагоналей этого параллелепипеда МА представляет собой одну из растяжек, закрепляющих груз за его монтажную петлю М и увязочное устройство вагона А.
На рис.1.19 обозначены:
М – точка, совпадающая с серединой увязочного устройства груза;
A – точка, которая совпадает с серединой увязочного устройства вагона; A0 – проекция монтажной петли груза к полу вагона;
A01 и A02 – проекции точки A на вертикальную V и фронтальную W поверх- ности параллелепипеда, совпадающие с боковой вертикальной поверхностью груза;
35

Рис.1.19. К определению проекции усилий гибкого элемента крепления (растяжки) на оси координат
АМ – длина растяжки, равная одной из диагоналей параллелепипеда;
γ – угол, образованный между следом растяжки МA01, расположенной на боковой поверхности груза и линией A0A01, лежащей параллельно оси абсцисс;
χ – угол, образованный между следом растяжки МA02, расположенной на фронтальной поверхности W и линией A0A02, лежащей параллельно оси орди- нат;
Rр – реакция растяжки, приложенная в точке M груза после отбрасывания связи, согласно принципу освобождения от связей, известной из курса теорети- ческой механики (см. на ссылку на литературу, приведенной на С.25), в кН; По аксиоме действия и противодействия усилие в растяжке равно этой реакции, которая далее будет отождествляться с усилием растяжки;
Rx, Ry и Rz - проекции на координатные оси усилия в растяжке;
RH, RV и Rw - проекции на горизонтальную Н, вертикальную V и фронталь- ную W поверхности параллелепипеда усилия в растяжке Rр.
Проекции усилия в растяжке на координатные оси x, y и z определяются методом двойного проецирования с использованием формул п.1.1 согласно рис. 1.18:
Rx = RH × cos βпр ; Ry = RH × sin βп ; Rz = Rр ×sin α , (1.10)
где RH - проекция на горизонтальную плоскость (пол вагона) усилия в растяж- ке:
RH = Rр × cosα |
(1.11) |
Подставляя выражение (1.11) в первое и второе равенства (1.10), получим:
36

Rx = Rр × cosα × cos βпр ; Ry = Rр × cosα × sin βп .
Rz = Rр × sinα . |
(1.12) |
Имея в виду формулу (1.1), (1.4) и (1.5), окончательно можно получить формулы для определения проекции усилий в растяжке на координатные оси x, y и z в удобном для вычисления виде (заменой тригонометрических функции отношениями проекции растяжек к их длине):
Rx = |
a |
р |
× Rр ; |
Ry = |
вр |
× Rр ; . |
Rz |
= |
h |
р |
× Rр |
. (1.13) |
|
lр |
|
|
|||||||||
|
|
lр |
||||||||||
|
|
|||||||||||
|
lр |
|
|
|
|
|
|
|||||
При необходимости можно выразить проекции усилий RV и RW через уси- лия в растяжке Rр по формулам:
RV = Rр × cosγ ; RW = Rр × cos χ , |
(1.14) |
где |
|
cosγ = |
lV |
|
cos χ = |
l |
|
|
|
и |
W |
(1.15) |
|||
lр |
||||||
lр |
||||||
|
|
|
|
с учетом того, что в них lv и lw проекции растяжек соответственно на верти- кальную и фронтальную плоскости:
|
|
|
|
|
|
|
|
l = a2 |
+ h2 |
, |
l = в2 |
+ h2 |
|||
V |
р |
р |
W |
р |
р . |
||
Таким образом, получены компоненты усилия растяжки в виде проекций на координатные оси:
Rх – проекция усилия растяжки на продольную ось вагона (или на пол ва- гона);
Rу – проекция усилия растяжки на поперечную ось вагона;
Rz – проекция усилия растяжки на вертикальную ось вагона (или на боко- вую поверхность груза).
Полученные компоненты или проекции активно используются при состав- лении уравнений равновесия, как в проекциях, так и в моментах относительно оси.
1.2.5. Момент силы относительно точки
Moment of a force relatively point
Пусть в плоскости Н к телу приложены силы F1 и F2, имеющие произволь- ные направления (рис.1.20). Требуется определить эффект действия этих сил, вызывающий поворот объекта относительно некоторого центра O. Такой эф- фект оценивается с помощью вычисления момента сил F1 и F2 относительно точки О.
37

►Момент силы относительно точки – алгебраи-
ческая величина, численно равная произведению силы на плечо.
►Плечо силы - это кратчайшее расстояние дан-
ной точки до линии действия силы. Иначе, плечо – длина перпендикуляра, опущенного от данной точки на линию действия силы.
Рис.1.20. К определению момента
силы относительно точки
Момент силы считается положительным, если эта сила вращает тело во- круг точки О в направлении отсчета углов, т. е. в обратном ходу часовой стрелки, согласно ссылки на литературу, приведенной на С. 30.
Единицей измерения момента силы является Н×м (ньютон на метр), кН×м (килоньютон на метр) или тс×м (тонна сила на метр), который все еще широко используется на железнодорожном транспорте (см., например, гл.1 ТУ).
Математически момент силы относительно точки (в кН·м) запишется в ви-
де:
mO (F) = ±Fh , |
(1.16) |
где F – сила, приложенная на тело в кН; h – плечо силы F в м.
Моменты силы F1 и F2, относительно точки О запишутся в виде:
mO (F1) = F1h1 , mO (F2 ) = −F2h2 . |
(1.17) |
Сумма моментов дает меру механического действия, связанного с поворо- том рассматриваемого тело относительно центра O.
Можно показать, что при переносе этих сил в один центр возникают соот- ветствующие пары сил – совокупности двух равных параллельных сил, направ- ленных в противоположенные стороны (метод Пуансо). Сумма моментов этих пар позволяет оценить вращательный эффект данной системы сил, а суммар- ный вектор, полученный после сложения перенесенных сил в этот центр, – по- ступательное движение системы в направлении результирующего вектора.
Пользуясь формулой (1.16), можно определить моменты любых сил отно- сительно выбранного центра, в том числе и моменты пар сил, составить мо- ментные уравнения равновесия и найти реакции опор двух опорной балки, на- груженной силами и моментами. Аналогично можно определить статически уравновешенное распределение силы тяжести груза, опирающегося на две подкладки, на определенные точки рамы платформы, и в результате найти си- лы, действующие на шкворневую балку платформы.
38
1.2.6. Момент силы вокруг неподвижной оси
Moment of a force around the ummobility axes
При изучении дисциплины “Крепление грузов в вагонах” и решении задач на определение усилий в гибких элементах креплений груза и устойчи- вость груза от опрокидывания широко используется понятие “момент силы вокруг неподвижной оси”.
Момент силы относительно оси – алгебраическая величина, численно равная произведению проекции силы на плоскость, перпендикулярную оси, на плечо этой проекции относительно точки пересечения оси с этой плоскостью.
Данное определение сводит вычисление момента силы относительно оси (в пространстве) к вычислению момента силы относительно центра (на плоско- сти). Плечо проекции силы на плоскость определяется так же, как и ранее для момента силы относительно центра.
Момент силы относительно оси считается положительным, если проекция
силы на перпендикулярную плоскость вращает тело вокруг оси против часовой стрелки при взгляде навстречу оси.
При использовании разложения усилия, произвольно расположенного в пространстве, на компоненты, параллельные координатным осям (см. п.1.2.4)
момент относительно любой из осей легко может быть вычислен как сумма моментов от каждой из компонент (теорема о моменте равнодействующей).
При вычислении моментов силы относительно оси следует помнить сле- дующие легко доказываемые два утверждения.
Утверждение 1. Момент силы, направленной параллельно оси, равен нулю. Утверждение 2. Момент силы, пересекающей ось, равен нулю.
Пусть, например, тело (груз) от сдвига и/или опрокидывания удерживается усилием одного гибкого элемента крепления Rр, компоненты которого Rx, Ry и Rz показаны так, как на рис.1.21. При расчетах на опрокидывание собственный вес груза и усилия от растяжек являются удерживающими силами, а возни- кающие силы инерции при движении платформы – опрокидывающими.
В данном случае на тело действует сис- тема удерживающих сил Rx, Ry и Rz. Требует- ся определить моменты от каждой из компо- нент усилия Rx, Ry и Rz относительно коорди-
натных осей для качественной оценки схемы постановки данного элемента крепления в предположении, что опрокидывание может произойти относительно этих осей.
Рис.1.21. К определению момента силы
относительно неподвижной оси
39