

Электропневмоавтоматика 2
.pdf
а) |
б) |
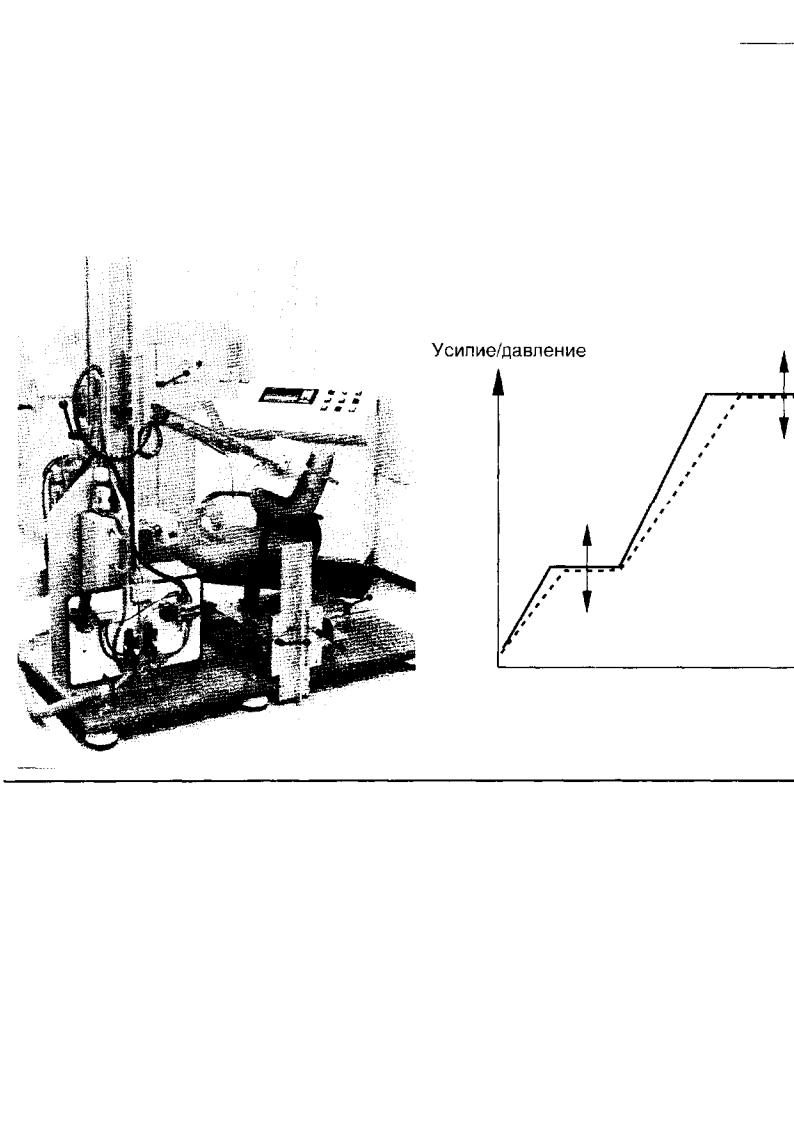
Рис. 9.17:
Установка для испытаний офисных кресел: а) общий вид; б) характеристика усилия в функции времени
Электропневматическая система управления установки для испытаний |
Упра |
кресел работает в соответствии со следующими принципами: |
испы |
• Программируемый логический контроллер с аналоговым выходом |
уста |
задает необходимые значения давления в форме напряжения |
|
212
Гпава 9
Когда напряжение на выходе ПЛК возрастает, возра сжатого воздуха, который пропорциональный регулято цилиндра. Усилие на штоке увеличивается. Когда на ходе ПЛК падает, регулятор снижает давление в п Усилие на штоке уменьшается.



276
Гпава 9
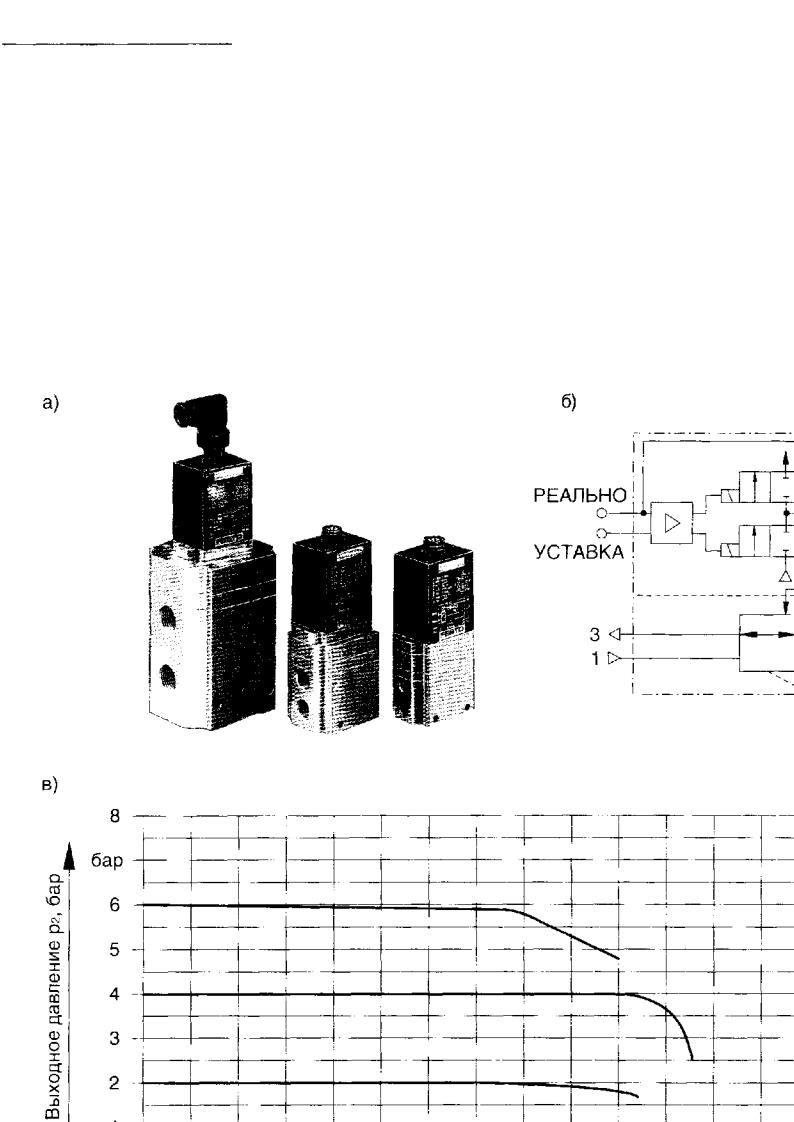
Принципиальная схема |
На рис. 9.19 б показана принципиальная схема 5/3- |
|
распределителя с |
пропорциональным управлением. В соответствии с ан |
|
пропорциональным |
ческим входным сигналом распределитель может за |
|
управлением |
положения: |
|
|
• |
Входной сигнал менее 5 В: каналы 1 и 2, а такж |
|
|
друг с другом |
|
• Входной сигнал равен 5 В: распределитель закрыт (с |
|
|
• |
Входной сигнал выше 5 В: каналы 1 и 4, а также 2 |
|
|
с другом. |
Расходная |
В зависимости от значения входного сигнала прохо |
|
характеристика |
пределителя также может изменяться. График зави |
|
распределителя с |
протекающего через распределитель, в зависимости |
|
пропорциональным |
ного сигнала показан на рис. 9.19 в. |
|
управлением в функции |
• Входной сигнал О В: |
|
входного сигнала |
||
|
|
Каналы 1 и 2 соединены, максимальный расход |
|
• |
Входной сигнал 2,5 В: |
|
|
Каналы 1 и 2 соединены, уменьшенный расход |
|
• |
Входной сигнал 5 В: |
|
|
Распределитель закрыт |
|
• |
Входной сигнал 7,5 В: |
|
|
Каналы 1 и 4 соединены, уменьшенный расход |
|
• |
Входной сигнал 10 В: |
|
|
Каналы 1 и 4 соединены, максимальный расход. |
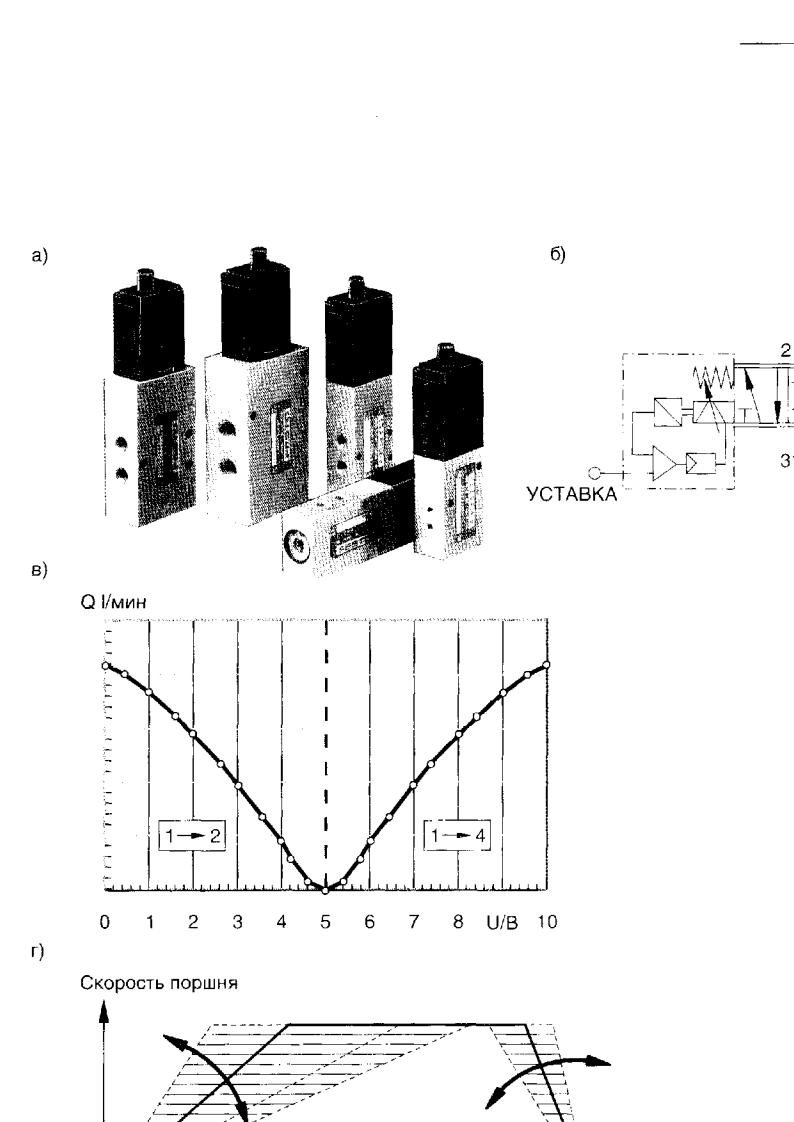
Пневматический |
Пневматический привод позиционирования использует |
|
привод |
с помощью пневматического цилиндра рабочий элем |
|
позиционирования |
несколько задаваемых программой позиций. С помощ |
|
|
ционирования поршень цилиндра в каждой позиции за |
|
|
сторон давлением сжатого воздуха. Это позволяет ос |
|
|
не только в крайних положениях, но и в любой желаем |
|
|
позиции в пределах рабочего хода. В зависимости о |
|

278
Гпава 9