239
Гпава 9
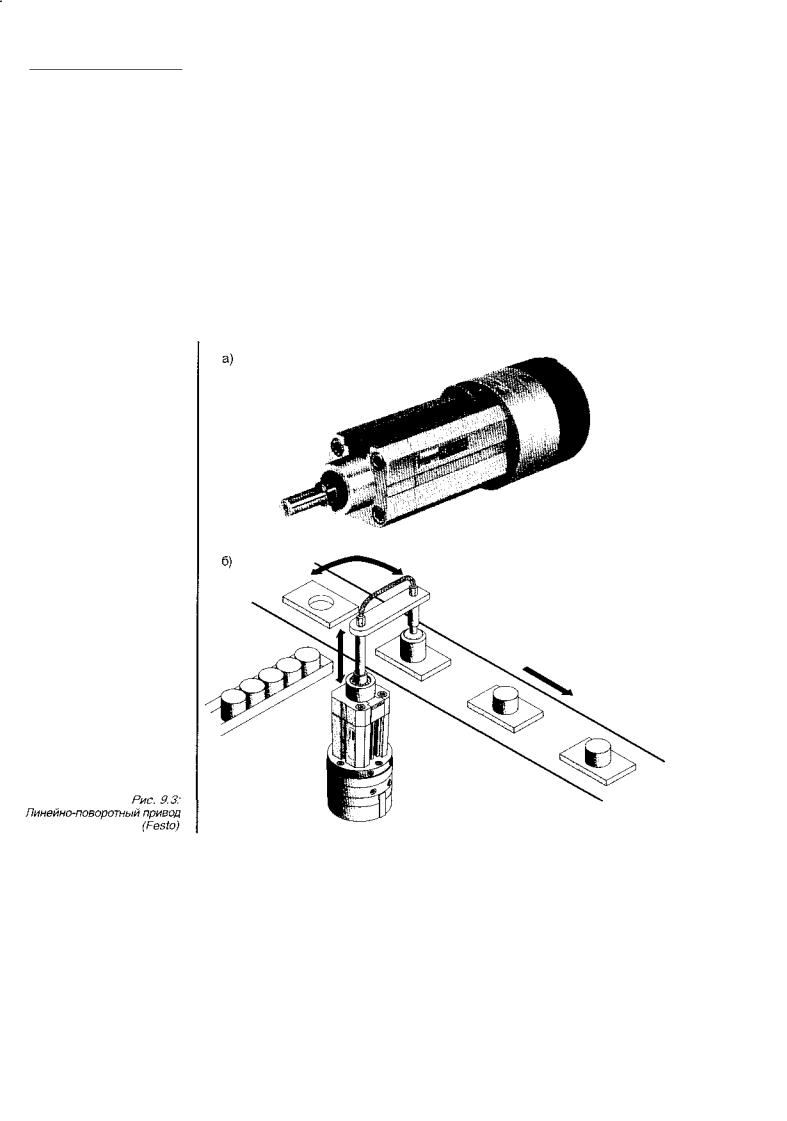
Для операций перемещения и сборки часто необходимо использовать Робототехника элементы, которые могут совершать перемещения в двух или трех раз личных направлениях. В таких случаях используются приводы специаль ных проектов. Сегодня все большее применение находят стандартные модули, из которых легко можно собрать необходимый механизм. Такой модульный подход имеет следующие преимущества:
•Простая сборка
•Сочетание приводов и механических направляющих
•Встроенные пинии питания, например для захватов и вакуумных присосок.
242
Гпава 9
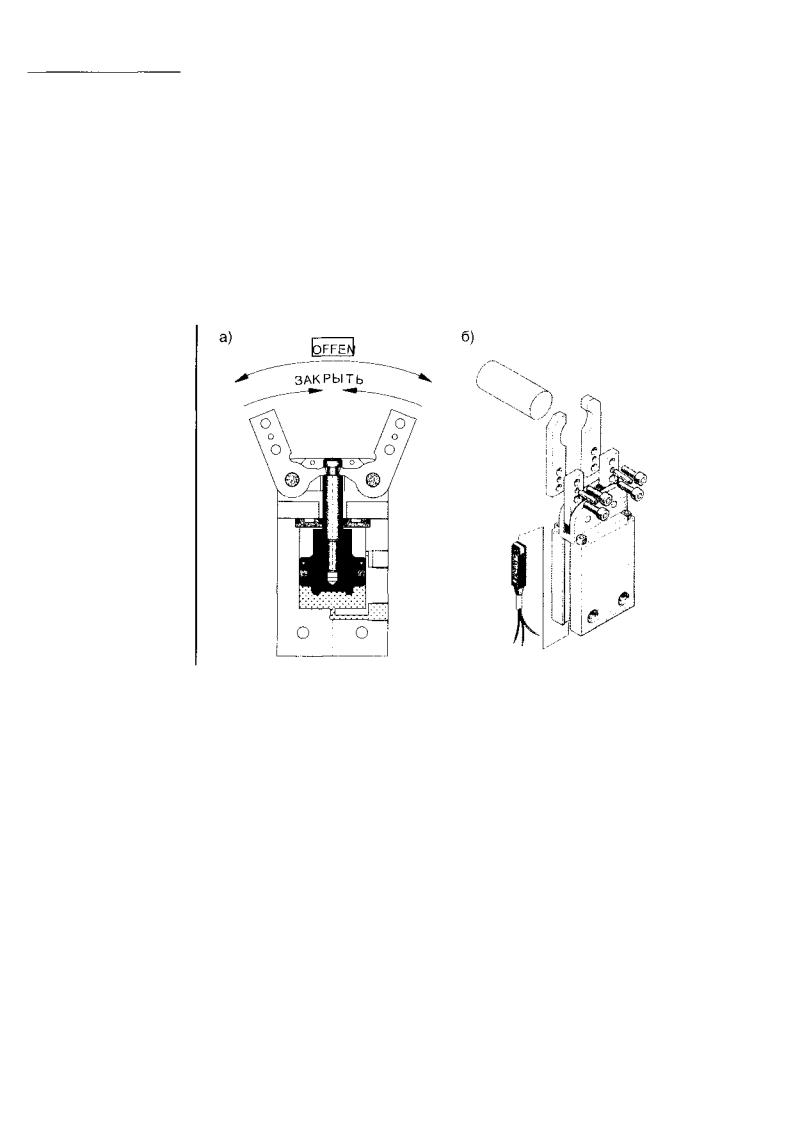
На рис. 9.5 а показан поперечный разрез углового захвата с рис. 9.4 б. Пальцы захвата приводятся в движение пневмоцилиндром двусторон него действия. На рис. 9.5 б показано, как к такому захвату можно крепить подходящие для конкретной детали губки и установить датчика положения.
Выбор типа и размера захвата, а также формы его губок зависит от формы и веса детали.
Рис. 9.5: Угловой захват: принцип работы, губки и датчики
положения
Вакуумные захваты Вакуумные захваты (или присоски) используются для манипулирования с крупными (такими как коробки), гибкими (такими как пленка, бумага) объектами или деталями с чувствительной поверхностью (например, оптические линзы).
243
Гпава 9
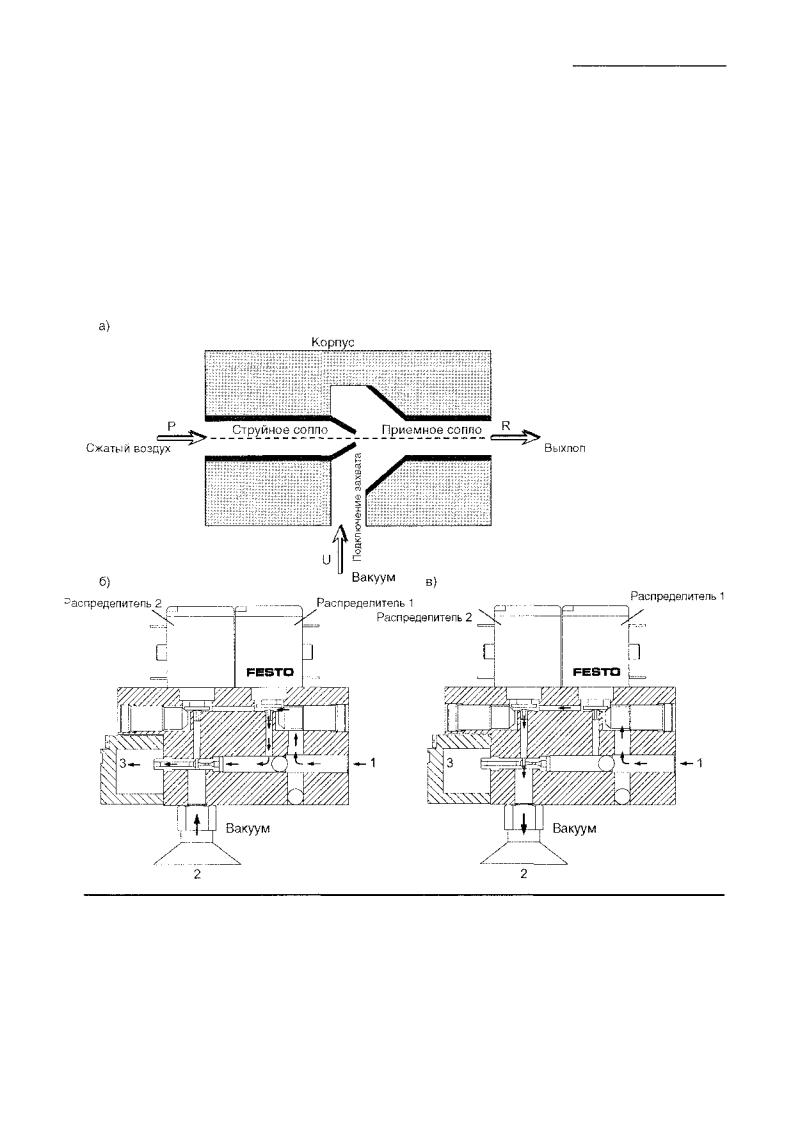
На рис. 9.6 а показан разрез генератора вакуума, работающего на прин ципе эжекции. Сжатый воздух поступает в струйное сопло, где разго няется до больших скоростей. На выходе из сопла давление меньше, чем окружающее. В результате воздух подсасывается из канала U, вызы вая в нем частичное разряжение, т. е. вакуум. К каналу U и подключа ется вакуумный захват.
Рис. |
9.6: |
|
|
|
Принцип работы |
электропневматического |
генератора |
вакуума: |
а) |
принцип эжекции; 6) режим "всасывания"; |
в) режим |
"сброса" |
244
Гпава 9
Генератор вакуума Работа генератора вакуума основана на принципе эжекции, что де монстрируют рис. 9.6 б и 9.6 в. На рис. 9.6 б показан режим "всасывания 2/2-распределитепь 1 с электромагнитным управлением открыт. Сжатый воздух поступает в канал 1, затем проходит через струйное сопло в глу шитель 3. В результате в канале 2 создается частичный вакуум, и деталь с помощью присоски захватывается.
На рис. 9.6 в показан режим "сброса". Открыт 2/2-распределитель 2, и сжатый воздух из канала 1 напрямую идет в канал 2, быстро сбрасывая деталь, удерживаемую присоской.
245
Гпава 9
Все большее распространение в электропневмоавтоматике получают 9.3. Датчики электронные двоичные (бинарные) датчики. К ним относятся:
•Индуктивные датчики положения вместо герконов
•Пневмоэлектронные преобразователи вместо реле давления.
Отсутствие в электронных датчиках подвижных частей обеспечивает большую продолжительность службы и лучшую надежность. К тому же такие датчики часто настраиваются более легко и точно.
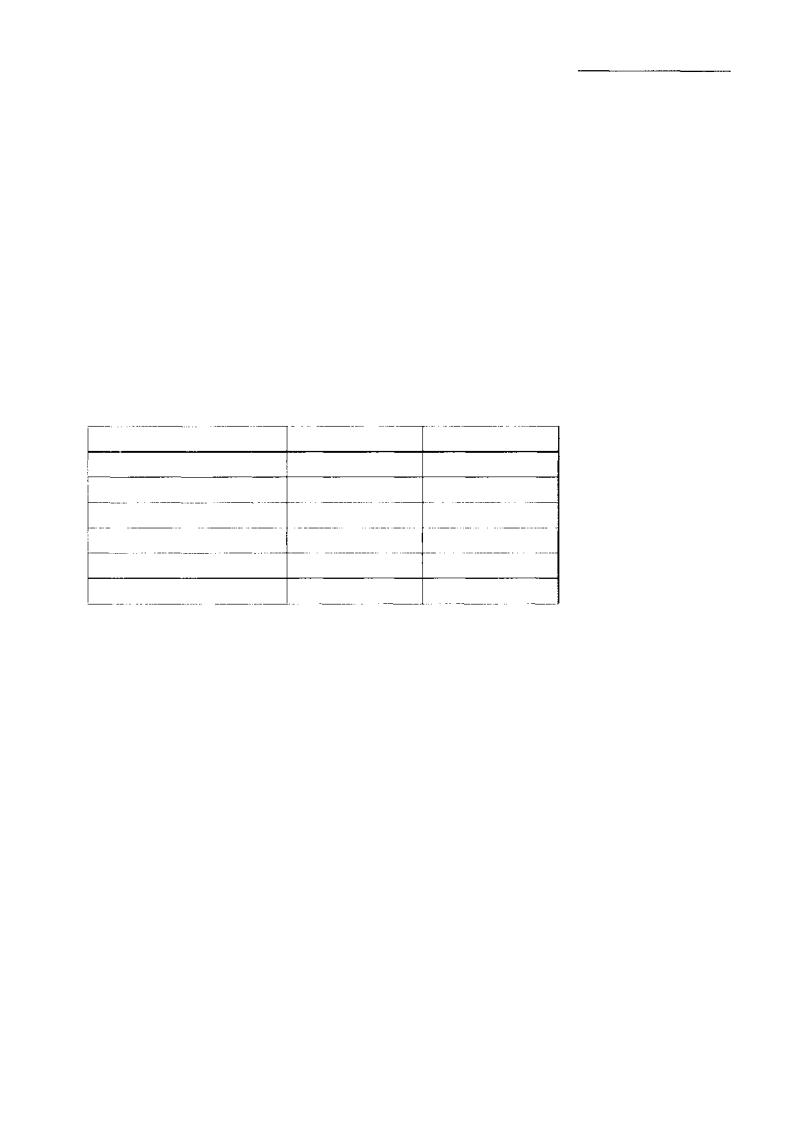
В таблице 9.1 собраны двоичные датчики, которые используются для об |
Обнаружение |
наружения объектов и подтверждения положения рабочих органов. Про |
положения |
должают использоваться и механические концевые выключатели |
|
|
благодаря своей прочной |
конструкции. |
|
|
|
Тип датчика |
Принцип работы |
Способ переключения |
|
|
Концевой выключатель |
Контактный |
Подвижный контакт |
|
|
Геркон (магнитный) |
Бесконтактный |
Подвижный контакт |
|
|
Индуктивный |
Бесконтактный |
Электронный |
|
|
Емкостной |
Бесконтактный |
Электронный |
|
|
Ультразвуковой |
Бесконтактный |
Электронный |
Таблица |
9.1: |
|
|
|
Оптический |
Бесконтактный |
Электронный |
Датчики |
приближения, |
|
|
|
положения |
и концевые |
выключатели
248
Гпава 9
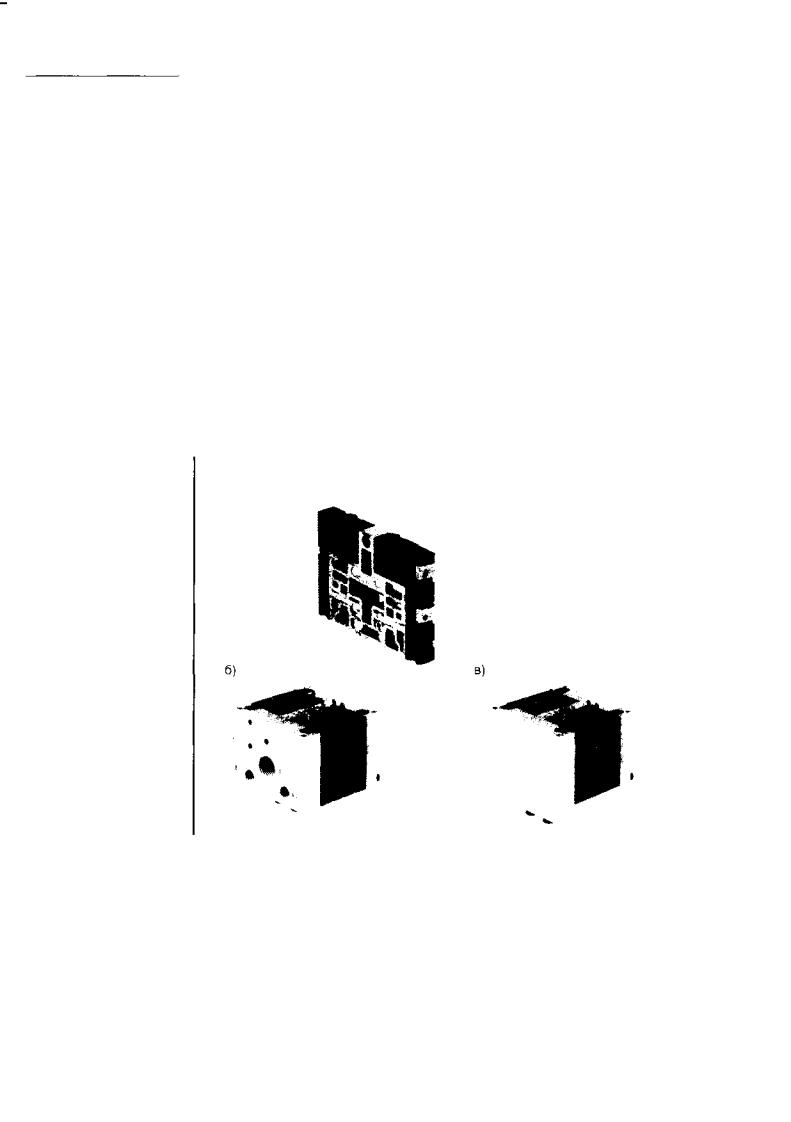
Оптимизация |
Блоки или батареи распределителей, показанные на рис. 9.76 и 9.7 = |
распределителей |
характеризуются более простым и эффективным подводом и выхлопе, |
блочного монтажа |
воздуха, компактностью и хорошим соотношением цена/качество. Бл:- |
|
может состоять из следующих частей: |
|
• |
Модулей самих распределителей |
|
• |
Модулей для пневматических подключений |
|
• |
Модулей для электрических подключений. |
На рис. 9.7 а показан модуль распределителя, оптимизированный д г - блочного монтажа. Несколько таких модулей заключаются между к о н цевыми плитами. Сжатый воздух подается к одной из концевых п л и - (рис. 9.7 б) или к присоединительному модулю снизу (рис. 9.7 в).
248
Гпава 9
Оптимизация |
Блоки или батареи распределителей, показанные на рис. 9 . 7 6 и 9 . 7в |
распределителей |
характеризуются более простым и эффективным подводом и выхлопов |
блочного монтажа |
воздуха, компактностью и хорошим соотношением цена/качество. Бпс*. |
может состоять из следующих частей:
• Модулей самих распределителей
• Модулей для пневматических подключений
• Модулей для электрических подключений.
На рис. 9.7 а показан модуль распределителя, оптимизированный для блочного монтажа. Несколько таких модулей заключаются между кон цевыми плитами. Сжатый воздух подается к одной из концевых пли- (рис. 9 . 7 б) или к присоединительному модулю снизу (рис. 9 . 7 в).
а)
Рис. 9.7: Блок распределителей модульного дизайна:
а) |
модуль |
распределителя; |
б) подвод |
сжатого |
воздуха |
|
|
и |
выхлоп |
|
в |
концевых |
крышках; |
в) |
подвод |
сжатого |
воздуха |
|
|
и выхлоп снизу |