

9.3. Корректирующие устройства по внешнему воздействию
При изменении передаточной функции прямой цепи с помощью последовательных, параллельных или встречно-параллельных корректирующих устройств для достижения заданных показателей качества неизменным остается главный принцип построения системы – принцип обратной связи (управление по отклонению). Учет внешнего воздействия при коррекции, в частности применение принципа компенсации (управление по возмущению) совместно с управлением по отклонению, позволяет расширить возможности коррекции системы.
Системы, использующие как управление по отклонению, так и по возмущению, относятся к классу комбинированных систем управления (см. подразд. 1.1). Наиболее часто комбинированное управление применяется для повышения точности системы управления и уменьшения установившейся ошибки. При определенных условиях с помощью комбинированного управления можно свести установившуюся ошибку к нулю при любой форме внешнего воздействия. Такое свойство называется инвариантностью системы по отношению к внешнему воздействию.
На
рис. 9.5, а
представлена структура комбинированной
системы с корректирующим устройством
по управляющему воздействию, а на рис.
9.5, б –
с корректирующим устройством
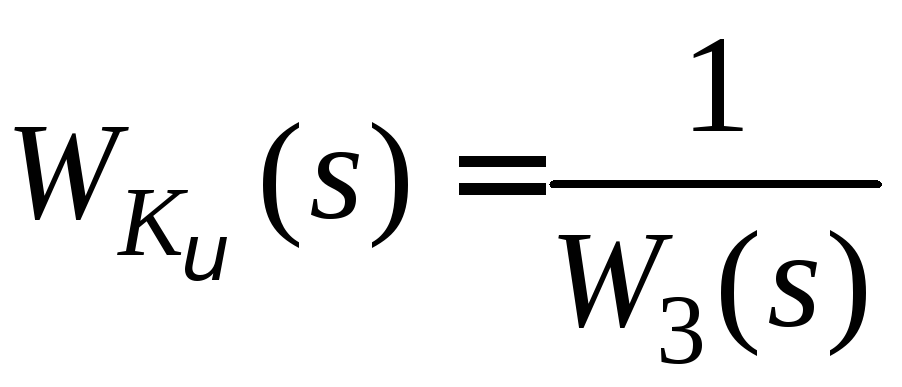
по возмущению, где в первом случае
передаточная функция корректирующего
устройства обозначена через
![]() ,
а во втором
– через
,
а во втором
– через
![]() .
.
Передаточная
функция замкнутой системы без коррекции,
связывающая выход y
со входом ![]() ,
для обоих
случаев имеет вид
,
для обоих
случаев имеет вид
![]() .
(9.9)
.
(9.9)
Найдем связь изображений выходного сигнала y с внешними воздействиями.
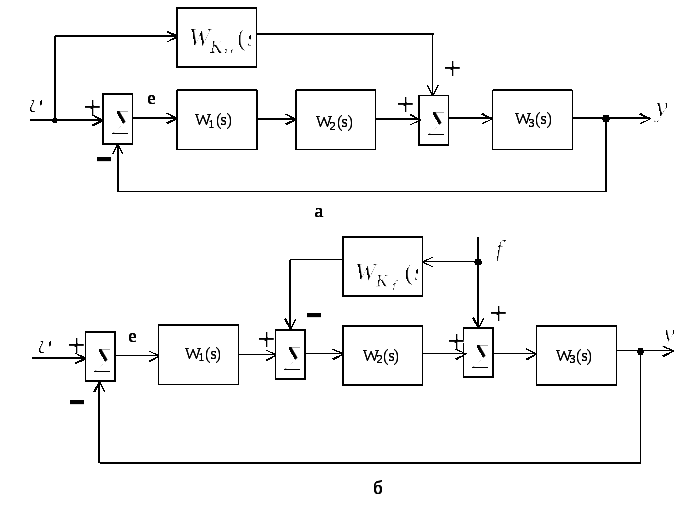
Рис. 9.5
Для структуры, изображенной на рис. 9.5, а, имеем
 ,
(9.10)
,
(9.10)
а для структуры на рис. 9.5, б имеем
 . (9.11)
. (9.11)
Задача
любой системы автоматического управления
– как можно более точно воспроизвести
управляющий (полезный) сигнал
![]() и максимально ослабить влияние возмущения
на выходной сигнал. С этой точки зрения
желательно, чтобы в (9.10) передаточная
функция, связывающая
и максимально ослабить влияние возмущения
на выходной сигнал. С этой точки зрения
желательно, чтобы в (9.10) передаточная
функция, связывающая![]() и
и![]() ,
была равна единице (тогда
,
была равна единице (тогда![]() ),
а передаточная функция в (9.11), связывающая
),
а передаточная функция в (9.11), связывающая![]() и
и![]() ,
была равна нулю (тогда
,
была равна нулю (тогда![]() не влияет на
не влияет на![]() ).
).
Выполнением этих условий будут соответственно следующие соотношения:
 , (9.12)
, (9.12)
![]() . (9.13)
. (9.13)
Условия
(9.12), (9.13) соответствуют так называемой
полной инвариантности
системы. При
выполнении (9.12) передаточная функция,
связывающая ошибку е
и входной сигнал
![]() ,
как это нетрудно проверить, будет равна
нулю, т.е. ошибка в системе не зависит
(инвариантна) от управляющего сигнала
и всегда равна нулю. При выполнении
(9.13) выход системыy
не зависит
(инвариантен) от возмущения f.
,
как это нетрудно проверить, будет равна
нулю, т.е. ошибка в системе не зависит
(инвариантна) от управляющего сигнала
и всегда равна нулю. При выполнении
(9.13) выход системыy
не зависит
(инвариантен) от возмущения f.
Отметим, что условия (9.12), (9.13) гарантируют инвариантность соответствующих координат с точностью до свободной составляющей, т.е. процессы, вызванные начальными отклонениями соответствующих координат и их производных, компенсироваться не будут.
Сравнивая (9.9)–(9.11), приходим к выводу, что характеристическое уравнение нескорректированной системы (9.9) и скорректированных систем (9.10), (9.11) одно и то же:
![]() , (9.14)
, (9.14)
т.е. коррекция по внешнему воздействию не изменяет характеристического уравнения системы и соответственно свойств устойчивости (запасов устойчивости), а также ряда других показателей качества переходных процессов.
В силу этого контур управления по отклонению, как правило, используют для придания определенных динамических свойств системе, а контуры коррекции по внешним воздействиям – для обеспечения точности.
Точное
выполнение условий инвариантности
(9.12), (9.13) практически невозможно из
условий физической реализуемости.
Действительно, если в (9.12), (9.13) передаточные
функции
![]() ,
,![]() соответствуют физически реализуемым
звеньям, т.е. степени полиномов относительно
соответствуют физически реализуемым
звеньям, т.е. степени полиномов относительно![]() их числителя меньше степеней знаменателя,
то передаточные функции
их числителя меньше степеней знаменателя,
то передаточные функции![]() и
и![]() ,
обратные им, будут соответствовать
физически нереализуемым звеньям.
,
обратные им, будут соответствовать
физически нереализуемым звеньям.
Поэтому (9.12), (9.13) выполняются на практике с некоторой погрешностью, в силу чего и инвариантность систем будет неполной, но ошибки в системе с помощью корректирующих устройств по внешнему воздействию могут быть значительно уменьшены.