

8.2. Схемы моделирования и виды уравнений состояния
В зависимости от структуры матрицы А в (8.3) из общего класса уравнений состояния выделяют два подкласса. Если матрица А в (8.3) является диагональной:
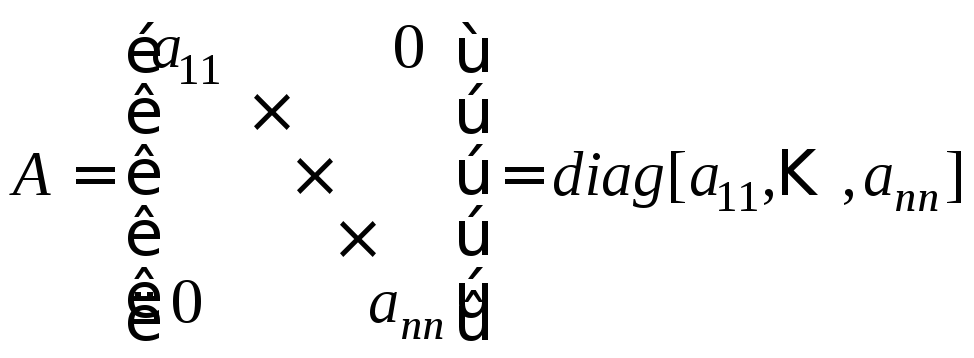 (8.5)
(8.5)
или в общем случае представлена в форме Жордана, то имеем каноническую форму уравнений состояния. Примером матрицы в форме Жордана может служить матрица

размерностью 4×4, имеющая одну клетку Жордана размерностью 3×3.
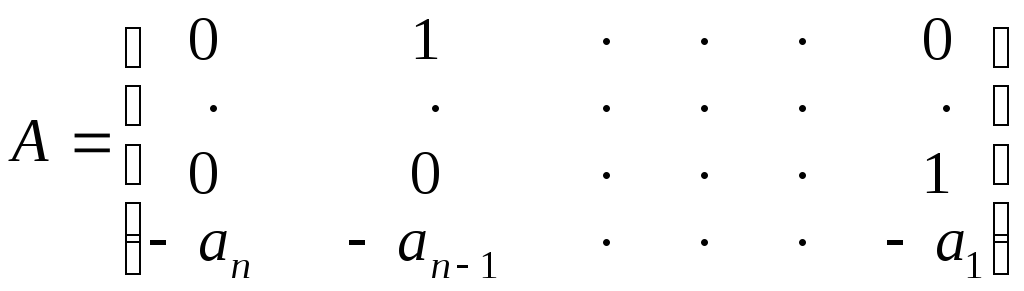
Если матрица А в (8.3) представлена в виде
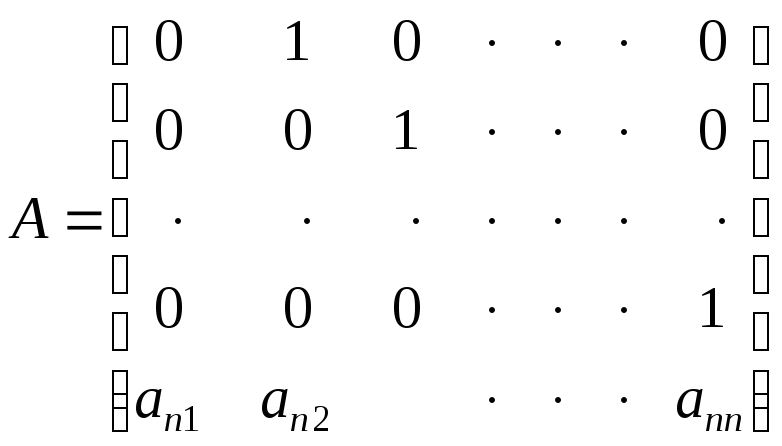 ,
(8.6)
,
(8.6)
то уравнения состояния имеют нормальную форму. Матрицу такой структуры называют сопровождающей матрицей или матрицей Фробениуса.
Пусть
в уравнении (8.3) матрица
![]() ,
т.е.
,
т.е.![]() ,
,![]()
![]() и матрицаА
является матрицей Фробениуса (8.6). Тогда,
очевидно,
и матрицаА
является матрицей Фробениуса (8.6). Тогда,
очевидно,
![]() ,
,![]() ,…,
,…,![]() ,
т.е. в качестве переменных состояния
выбрана сама выходная координатаy
и ее производные. В этом частном случае
вектор состояния называют фазовым
вектором, а
пространство состояния – фазовым
пространством.
,
т.е. в качестве переменных состояния
выбрана сама выходная координатаy
и ее производные. В этом частном случае
вектор состояния называют фазовым
вектором, а
пространство состояния – фазовым
пространством.
Для
более ясного понимания внутренней
структуры и взаимосвязи отдельных
переменных системы, описываемой
уравнениями состояния, применяют
графическую интерпретацию уравнений
состояния в виде структурных схем,
которые иногда называют схемами
моделирования. При этом используются
три основных блока, показанные на
рис. 8.1: а) сумматор
![]() ,
б) интегратор
,
б) интегратор![]() ,
в) блок преобразования (усиления)
,
в) блок преобразования (усиления)![]() ,
гдеА
– некоторая матрица.
,
гдеА
– некоторая матрица.
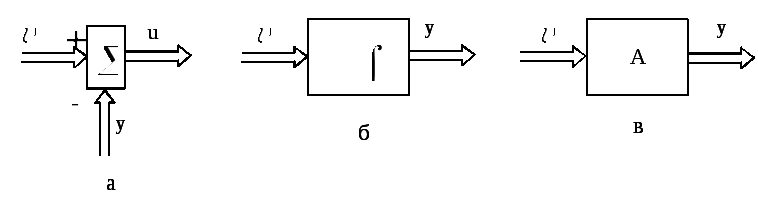
Рис. 8.1
Используя указанные блоки, можно изобразить схему моделирования по уравнениям (8.2), представленную на рис. 8.2.
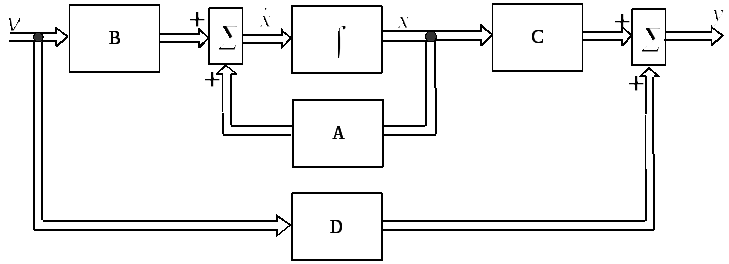
Рис. 8.2
Пример 8.2. Рассмотрим САУ из примера 8.1. В соответствии с полученными уравнениями состояния (8.4) нетрудно изобразить схему моделирования, представленную на рис. 8.3.

Рис. 8.3
Для
этого же примера получим другую структуру
схемы моделирования и соответственно
другую форму уравнений состояния.
Выходной сигнал y
и сигнал ошибки
e
можно связать следующим уравнением в
области изображений:
![]() ,
откуда нетрудно получить дифференциальное
уравнение разомкнутой системы
,
откуда нетрудно получить дифференциальное
уравнение разомкнутой системы![]() .
С учетом уравнения замыкания
.
С учетом уравнения замыкания![]() получим дифференциальное уравнение
замкнутой системы
получим дифференциальное уравнение
замкнутой системы![]() ,
в соответствии с которым нетрудно
получить схему моделирования (рис. 8.4).
,
в соответствии с которым нетрудно
получить схему моделирования (рис. 8.4).
Если
обозначить выходы интеграторов через
![]() и
и![]() ,
как показано на рис. 8.4, то можно в
соответствии со схемой моделирования
записать следующие уравнения:
,
как показано на рис. 8.4, то можно в
соответствии со схемой моделирования
записать следующие уравнения:![]() ,
,![]() ,
,![]() .
.
υ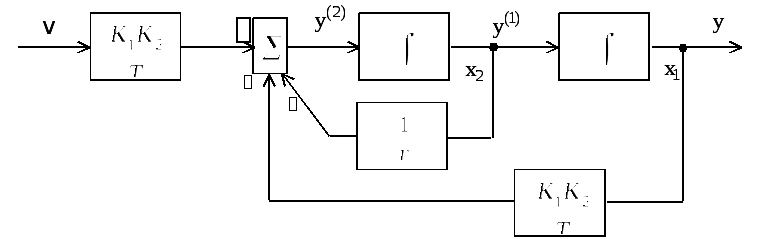
Рис. 8.4
Вводя
вектор состояния
![]() ,
уравнения представим в виде
,
уравнения представим в виде
 ,
,
![]() . (8.7)
. (8.7)
Уравнения (8.4) и (8.7) имеют различный вид, как и схемы моделирования (см. рис. 8.3 и 8.4), но описывают одну и ту же систему. Уравнения состояния (8.7) имеют нормальную форму, они составлены относительно фазовых координат.
8.3. Преобразование уравнений состояния
Пусть
система описывается уравнениями
состояния общего вида (8.3). Сделаем в
этих уравнениях замену переменных x
=
Qz,
где
![]() – новый вектор состояния,Q
– произвольная матрица размерностью
– новый вектор состояния,Q
– произвольная матрица размерностью
![]() с постоянными
коэффициентами. На матрицу Q
накладывается единственное ограничение
– она должна быть невырожденной
(неособенной), т.е. определитель этой
матрицы
с постоянными
коэффициентами. На матрицу Q
накладывается единственное ограничение
– она должна быть невырожденной
(неособенной), т.е. определитель этой
матрицы
![]() .
В этом случае всегда существует обратная
матрица, которую будем обозначать через
.
В этом случае всегда существует обратная
матрица, которую будем обозначать через![]() ,
такая, что
,
такая, что![]() ,
где
,
где![]() – единичная матрица размерностью
– единичная матрица размерностью![]() .
Очевидно, что при этих условиях существует
однозначная связь между векторамиx
и z:
.
Очевидно, что при этих условиях существует
однозначная связь между векторамиx
и z:
![]() ,
,![]() .
.
В
уравнениях (8.3) сделаем замену x
=
Qz
и с учетом того, что
![]() ,
получим
,
получим
![]() ,
,
![]() .
(8.8)
.
(8.8)
Уравнения
(8.8) будут новыми уравнениями состояния,
имеющими основную матрицу системы
![]() ,
входа
,
входа![]() и выходаCQ.
Так как Q
– произвольная матрица, то исходным
уравнениям (8.3) соответствует бесчисленное
количество эквивалентных уравнений
состояния (8.8).
и выходаCQ.
Так как Q
– произвольная матрица, то исходным
уравнениям (8.3) соответствует бесчисленное
количество эквивалентных уравнений
состояния (8.8).
Отметим,
что две матрицы A
и
![]() ,
связанные преобразованием
,
связанные преобразованием![]() ,
называются подобными. Подобные матрицы
имеют одинаковые собственные значения.
,
называются подобными. Подобные матрицы
имеют одинаковые собственные значения.
Используя линейное преобразование, можно поставить задачу о выборе при исследовании той или иной формы уравнений состояния. Наиболее часто решается задача преобразования исходной системы (8.3) к нормальной или канонической форме уравнений состояния (8.8).
Доказано,
что для произвольной матрицы А
всегда существует невырожденная
квадратная матрица размерностью
![]() ,
которую обозначим черезM
и назовем модальной,
такая, что матрица
,
которую обозначим черезM
и назовем модальной,
такая, что матрица
![]() будет иметь форму Жордана. Если матрицаА
имеет различные собственные значения
(числа)
будет иметь форму Жордана. Если матрицаА
имеет различные собственные значения
(числа)
![]() ,
являющиеся
корнями характеристического уравнения
,
являющиеся
корнями характеристического уравнения
![]() ,
(8.9)
,
(8.9)
то
матрица
![]() будет диагональной:
будет диагональной:![]() .
.
Таким
образом, преобразование произвольной
системы уравнений (8.3) к канонической
форме всегда возможно. Наиболее просто
задача определения модальной матрицы
решается для случая различных собственных
чисел матрицы А,
которые обозначим через
![]() .
Для каждого собственного числа
.
Для каждого собственного числа![]() находится собственный вектор
находится собственный вектор![]() из решения векторно-матричного уравнения
из решения векторно-матричного уравнения
![]() .
(8.10)
.
(8.10)
Матрица,
образованная вектор-столбцами
![]() ,
т.е. матрица
,
т.е. матрица
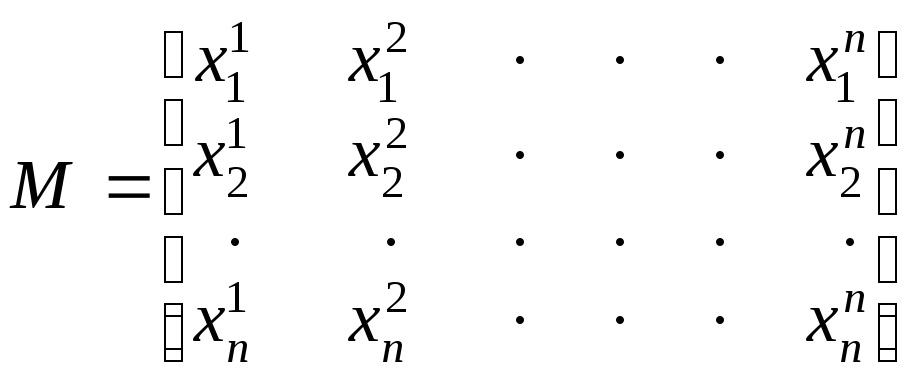 ,
(8.11)
,
(8.11)
и будет искомой модальной матрицей.
В
соответствии с (8.9) при
![]() определитель системы линейных уравнений
(8.10) равен нулю, т.е. система имеет
бесчисленное множество решений, каждое
из которых можно принять за собственный
вектор. Отсюда матрицаМ
является неединственной.
определитель системы линейных уравнений
(8.10) равен нулю, т.е. система имеет
бесчисленное множество решений, каждое
из которых можно принять за собственный
вектор. Отсюда матрицаМ
является неединственной.
В случае кратных собственных значений матрицы А задача определения модальной матрица значительно усложняется.
В частности, если исходная матрица А является матрицей Фробениуса вида
 (8.12)
(8.12)
и
собственные числа
![]() ,
являющиеся
корнями характеристического уравнения
,
являющиеся
корнями характеристического уравнения
![]() =
0, (8.13)
=
0, (8.13)
различны, то модальная матрица будет иметь вид
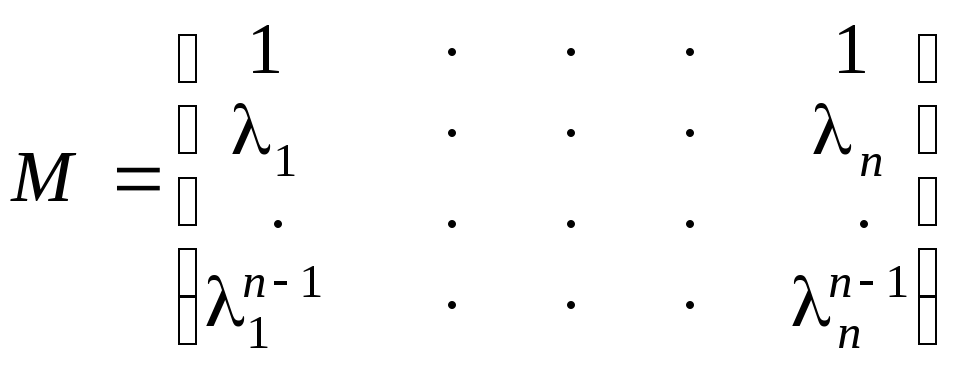 .
(8.14)
.
(8.14)
Пример
8.3. Пусть в
САУ, которая рассматривалась в примерах
8.1 и 8.2,
![]() с,
с,
![]() ,
тогда уравнения (8.7) будут иметь вид
,
тогда уравнения (8.7) будут иметь вид
![]() ,
,
![]() .
(8.15)
.
(8.15)
Преобразуем уравнения состояния к канонической форме. Основная матрица системы А является матрицей Фробениуса. Найдем ее собственные значения из решения характеристического уравнения
![]() .
.
Корни
уравнения будут различными:
![]() ,
,![]() .
Таким образом, в соответствии с (8.14)
определяем модальную матрицу M
и обратную ей
.
Таким образом, в соответствии с (8.14)
определяем модальную матрицу M
и обратную ей
![]() :
:
![]() ,
,
![]() .
.
Далее
M–1AM
= diag[–2+
j4,
–2 – j4],
![]() ,
,
![]() .
.
Итак, уравнения состояния (8.15) преобразуются к канонической форме:
![]() ,
,
![]() .
.
Пример 8.4. Пусть система описывается уравнениями состояния
![]() ,
,
![]() .
.
Корни
характеристического уравнения
![]() будут
будут
![]() ,
,![]() .
.
Находим
собственные векторы из решения системы
линейных уравнений
![]() ,
,![]() .
.
Полагая
![]() ,
будем иметь
,
будем иметь
Из
последних двух уравнений
![]() ,
откуда, задавая, например,
,
откуда, задавая, например,
![]() ,
получим
,
получим
![]() .
Итак, первый собственный вектор
.
Итак, первый собственный вектор
![]() .
При
.
При
![]() в конечном
итоге для определения координат второго
собственного вектора получим
в конечном
итоге для определения координат второго
собственного вектора получим
![]() .
Полагая
.
Полагая
![]() ,
будем иметь
,
будем иметь
![]() и соответственно
и соответственно
![]() .
Итак, матрицу М
можно выбрать в виде
.
Итак, матрицу М
можно выбрать в виде
![]() ,
,
![]() .
.
![]() ,
,
![]() ,
,![]() .
.
Окончательно уравнения в канонической форме будут иметь следующий вид:
 ,
,
![]() .
.