

5.2. Алгебраические критерии устойчивости
К алгебраическим критериям устойчивости относят те, которые позволяют судить об устойчивости системы по коэффициентам уравнения (5.2). необходимым условием устойчивости линейной системы (5.1) является положительность коэффициентов характеристического уравнения (5.2), т.е.
![]()
![]() . (5.3)
. (5.3)
Докажем
этот критерий. Пусть уравнение (5.2) имеет
n
корней
![]()
![]() ,
тогда полином
,
тогда полином![]() можно пo
теореме Безу представить в виде
можно пo
теореме Безу представить в виде
![]() .
Если
.
Если![]()
![]() ,
то произведениеn
сомножителей
,
то произведениеn
сомножителей
![]() всегда даст
полином n-й
степени с положительными коэффициентами,
и с учетом
всегда даст
полином n-й
степени с положительными коэффициентами,
и с учетом
![]() получим (5.3).
получим (5.3).
Критерий
является лишь необходимым, т.е. если
среди
![]() есть отрицательные коэффициенты, то
система неустойчива; если все
есть отрицательные коэффициенты, то
система неустойчива; если все![]() положительны, то система может быть как
устойчивой, так и неустойчивой. В этом
последнем случае требуется дальнейшее
исследование.
положительны, то система может быть как
устойчивой, так и неустойчивой. В этом
последнем случае требуется дальнейшее
исследование.
Рассмотрим критерий, дающий необходимые и достаточные условия устойчивости, предложенные немецким ученым А. Гурвицем в 1895 году. Предварительно из коэффициентов уравнения (5.2) сформируем матрицу Гурвица:
-
(5.4)
Алгоритм
ее формирования следующий. Сначала по
главной диагонали слева направо
выписываем коэффициенты
![]() .
Далее столбцы вверх от главной диагонали
дополняются коэффициентами с возрастающими
индексами, а вниз – с убывающими
индексами. Коэффициенты с индексами
большеn
и меньше нуля заменяются нулями. Последний
столбец матрицы имеет все нулевые
коэффициенты, кроме последнего
.
Далее столбцы вверх от главной диагонали
дополняются коэффициентами с возрастающими
индексами, а вниз – с убывающими
индексами. Коэффициенты с индексами
большеn
и меньше нуля заменяются нулями. Последний
столбец матрицы имеет все нулевые
коэффициенты, кроме последнего
![]() .
Обозначим
через
.
Обозначим
через
![]() главные определители матрицы Гурвица,
которые выделены в (5.4) штриховыми
линиями:
главные определители матрицы Гурвица,
которые выделены в (5.4) штриховыми
линиями:![]() ,где
,где
![]() –определитель
матрицы Гурвица.
–определитель
матрицы Гурвица.
Критepий
Гуpвица.
Необходимым и достаточным условием
устойчивости линейной системы является
при
![]() положительность всех определителей
Гурвица:
положительность всех определителей
Гурвица:
![]() . (5.5)
. (5.5)
Для систем до 4-го порядка включительно, раскрывая определители Гурвица, можно получить необходимые и достаточные условия устойчивости:
![]() (5.6)
(5.6)
![]() (5.7)
(5.7)
![]() ;
(5.8)
;
(5.8)
![]()
![]() (5.9)
(5.9)
Из
(5.6), (5.7) следует, что для системы первого
и второго порядка необходимые условия
совпадают с необходимыми и достаточными,
а при n
= 3 и 4 кроме необходимых условий следует
соблюдать дополнительное неравенство.
При n
= 5 и 6 появляются
два дополнительных неравенства, при
n
= 7 и 8 – три
и т.д. при
аналитических исследованиях критерий
Гурвица наиболее удобен для систем,
порядок которых
![]() .
.
С
помощью критерия Гурвица можно определить
границы устойчивости. Если
![]() и все определители Гурвица
и все определители Гурвица![]() ,
кроме последнего, больше нуля, то
нарушение условий устойчивости будет
при
,
кроме последнего, больше нуля, то
нарушение условий устойчивости будет
при![]() ,
откуда при
,
откуда при![]() получаем границу устойчивости
апериодического типа (появляется один
нулевой корень), а при
получаем границу устойчивости
апериодического типа (появляется один
нулевой корень), а при![]() границу устойчивости колебательного
типа (появляются два комплексно-сопряженных
корня). При этом все остальные корни
являются левыми. Граница устойчивости,
соответствующая бесконечному корню,
будет
границу устойчивости колебательного
типа (появляются два комплексно-сопряженных
корня). При этом все остальные корни
являются левыми. Граница устойчивости,
соответствующая бесконечному корню,
будет![]() .
.
Одним из частных случаев критерия Гурвица является критерий Льенара–Шипара (1914), по которому для устойчивости системы необходимо и достаточно выполнение следующих неравенств:
![]()
или
![]() ,
,
т.е. при соблюдении необходимых условий устойчивости требуется положительность четных или нечетных определителей Гурвица.
Вторым распространенным алгебраическим критерием устойчивости, дающим необходимые и достаточные условия устойчивости, является критерий Рауса–Гурвица. Этот критерий более удобен при анализе устойчивости с помощью ПЭВМ.
На
первом этапе составляется таблица
Рауса, элементы которой образуются из
коэффициентов характеристического
полинома замкнутой системы
![]() ,
в которой
,
в которой![]() .
.
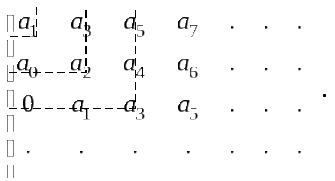
Таблица Рауса:
![]()
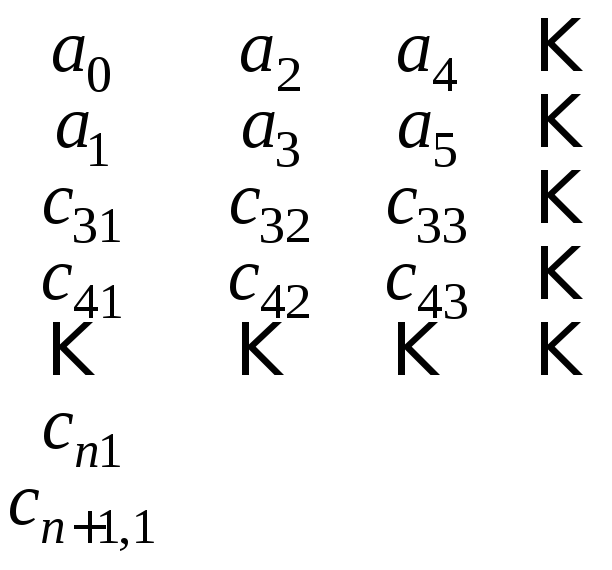 (5.10)
(5.10)
Первые
две строки состоят из коэффициентов
![]() .
.
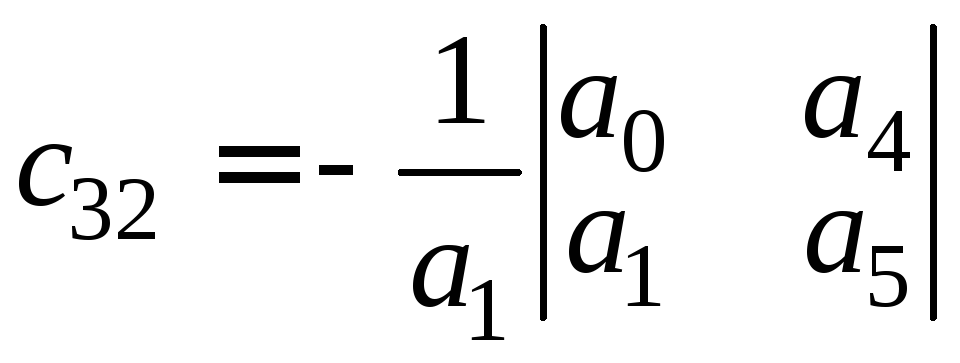
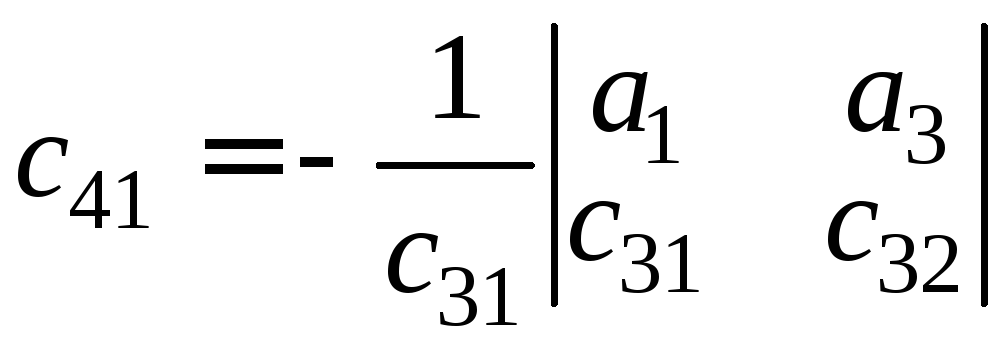
Коэффициенты последующих строк вычисляются так:
(5.11)
 ;
…
;
…
 ;
;
 ;
…
;
…
и т.д.
Левый столбец записывается для наглядности.
По
критерию Рауса–Гурвица система
устойчива, если при
![]() положительны все элементы первого
столбца таблицы (
положительны все элементы первого
столбца таблицы (![]() ,
,![]() ,
,![]() ,
,![]() …).
…).
Число правых корней в случае неустойчивой САУ равно числу перемен знака элементов первого столбца. Если элемент какой-то строки первого столбца равен нулю, то САУ либо неустойчива, либо находится на границе устойчивости [6].
Пример
5.1. Рассмотрим
замкнутую систему управления, у которой
передаточная функция разомкнутой
системы W(s)
имеет порядок не выше второго (![]() )
и определяется одним из перечисленных
выражений:
)
и определяется одним из перечисленных
выражений:
![]() ,
,
![]() ,
,![]() ,
,![]() ,
,![]() .
.
Характеристическое
уравнение замкнутой системы для
соответствующей разомкнутой будет
иметь следующий вид:
![]() ,
,
![]() ,
,![]()
![]() ,
,![]() .
Если параметры
.
Если параметры![]() ,
то в соответствии с (5.6), (5.7) замкнутая
система будет асимптотически устойчивой
для всех передаточных функций, кроме
,
то в соответствии с (5.6), (5.7) замкнутая
система будет асимптотически устойчивой
для всех передаточных функций, кроме![]() .в
этом случае замкнутая система будет
находиться на границе устойчивости,
так как
характеристическое
уравнение
.в
этом случае замкнутая система будет
находиться на границе устойчивости,
так как
характеристическое
уравнение
![]() имеет чисто мнимые корни
имеет чисто мнимые корни![]() (коэффициент
(коэффициент![]() и условие (5.7) не выполняется).
и условие (5.7) не выполняется).
Пример 5.2. Пусть передаточная функция разомкнутой системы
 ,
а
,
а
![]() .
.
Характеристическое
уравнение замкнутой системы будет
![]()
![]() ,
из которого следует, что при
,
из которого следует, что при![]() ряд коэффициентов характеристического
уравнения
ряд коэффициентов характеристического
уравнения![]() (при
(при![]() ),
),![]() и
и![]() (при
(при![]() )
и т.д. равен нулю. В этом случае не
выполняется необходимое условие
устойчивости (5.3) и система ни при таких
значениях параметровK
и
)
и т.д. равен нулю. В этом случае не
выполняется необходимое условие
устойчивости (5.3) и система ни при таких
значениях параметровK
и
![]() не может быть асимптотически устойчивой.
Такой класс систем называютстpуктуpно
нeустойчивыми.
не может быть асимптотически устойчивой.
Такой класс систем называютстpуктуpно
нeустойчивыми.
Пример
5.3. Передаточная
функция разомкнутой системы задана в
виде
![]() .
Характеристическое уравнение будет
.
Характеристическое уравнение будет![]() .
Используя (5.8), найдем условие устойчивости
системы в виде
.
Используя (5.8), найдем условие устойчивости
системы в виде![]() ,
,![]() ,
,![]() ,
,![]() ,
из которого следуют неравенства
,
из которого следуют неравенства![]() ,
,![]() ,
,![]() ,
,![]() .
.
Таким
образом, при заданных
![]() и
и![]() максимальное значение коэффициента
усиления ограничено и увеличение
приведет к потери устойчивости. Это
свойство, как будет показано дальше,
является весьма характерным для систем
автоматического управления и в общем
случае. Система будет находиться на
границе устойчивости, если выполняется
одно из соотношений:
максимальное значение коэффициента
усиления ограничено и увеличение
приведет к потери устойчивости. Это
свойство, как будет показано дальше,
является весьма характерным для систем
автоматического управления и в общем
случае. Система будет находиться на
границе устойчивости, если выполняется
одно из соотношений:![]() ,
,![]() ,
,![]() ,
,![]() .
.