

8.4. Нормальная форма уравнений состояния одномерной системы
Пусть динамика одномерной системы, имеющей один вход и один выход, описывается дифференциальным уравнением
![]() , (8.16)
, (8.16)
где
![]() ,
,![]() .
.
Требуется найти уравнения состояния (8.3) в нормальной форме, эквивалентные уравнению (8.16).
Задача
легко решается для частного случая
(8.16), если m
= 0, т.е. правая
часть (8.16) будет иметь вид
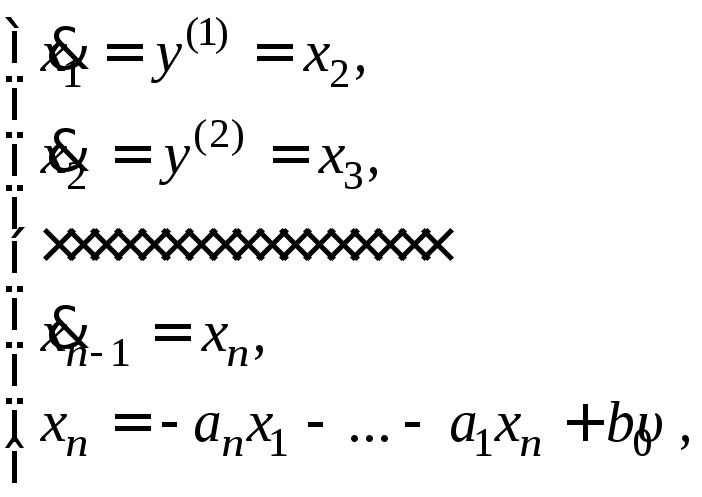
![]() .в
(8.16) сделаем замену переменных
.в
(8.16) сделаем замену переменных
![]() .
Дифференцируя
последовательно каждое равенство,
получим
.
Дифференцируя
последовательно каждое равенство,
получим
где
последнее соотношение соответствует
уравнению (8.16). Полученную систему с
учетом
![]() запишем в виде уравнений состояния в
нормальной форме:
запишем в виде уравнений состояния в
нормальной форме:
 ,
,
![]() , (8.17)
, (8.17)
где,
как обычно,
![]() .
.
Если
в (8.16) m
> 0, то также можно получить уравнения
состояния в нормальной форме. Вывести
их несколько сложнее, поэтому дадим
конечный результат. Для удобства будем
в (8.16) полагать m
= n.
Очевидно, если
m
< n,
то ряд первых коэффициентов
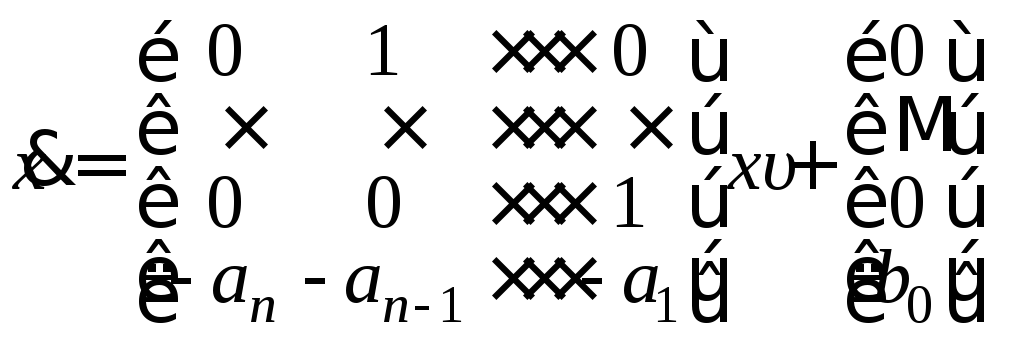
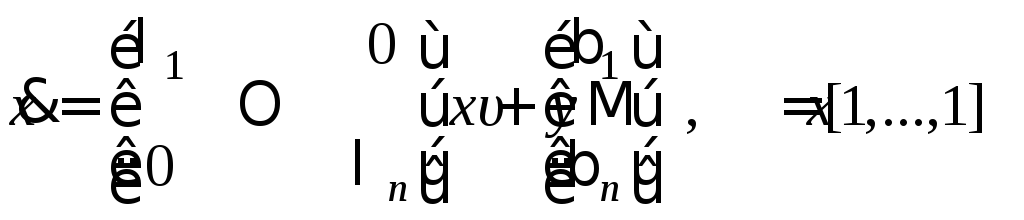
![]() будет равен нулю. Уравнения состояния
в этом случае будут иметь следующий
вид:
будет равен нулю. Уравнения состояния
в этом случае будут иметь следующий
вид:
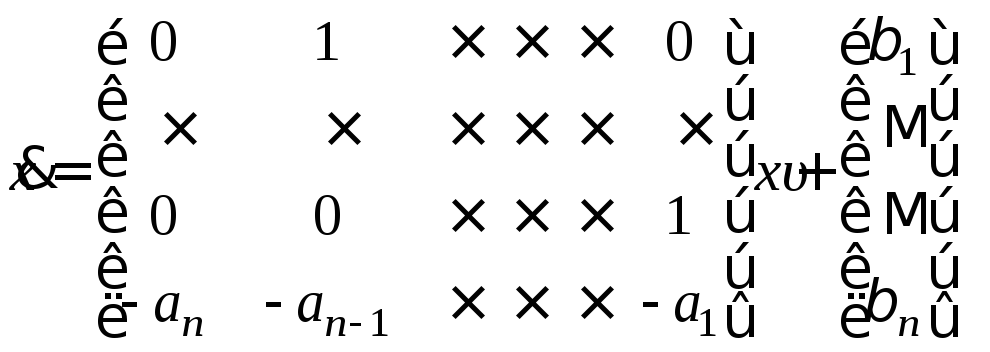 ,
,
![]() .
(8.18)
.
(8.18)
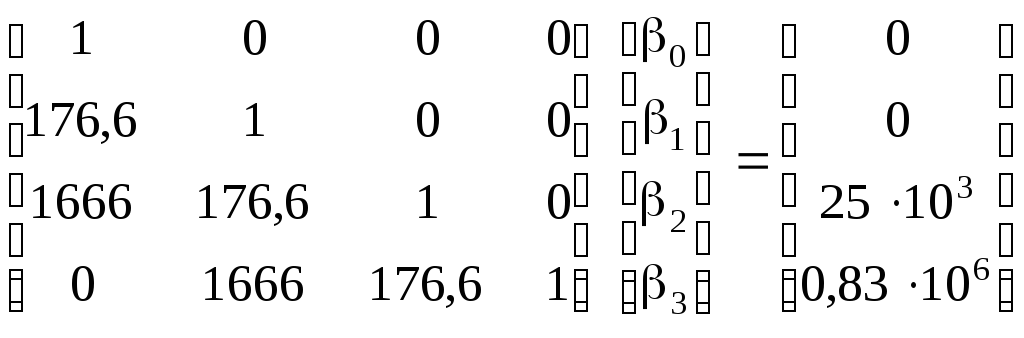
Коэффициенты
![]() определяются из решения системы линейных
алгебраических уравнений, записанных
в векторно-матричной форме:
определяются из решения системы линейных
алгебраических уравнений, записанных
в векторно-матричной форме:
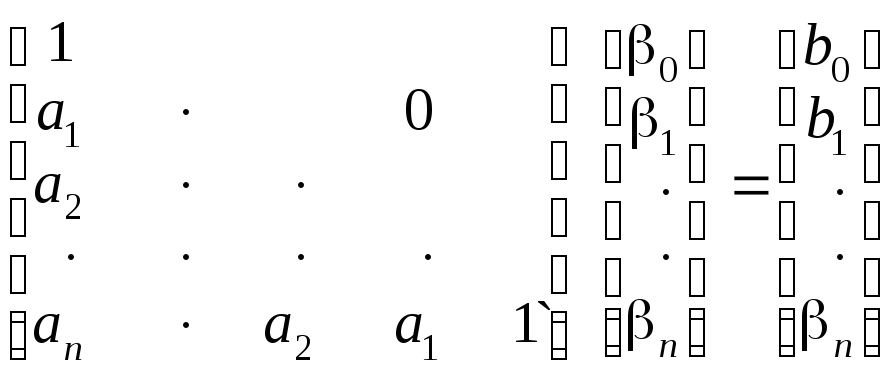 .
(8.19)
.
(8.19)
Из
(8.19) следует, что
![]() ,
,![]() ,
,![]() ,…,
откуда последовательно находятся
,…,
откуда последовательно находятся![]() ,
,![]() ,…
.
,…
.
Для
физически реализуемых систем
![]() и
и![]() .
.
Пример
8.5. Рассмотрим
замкнутую систему управления стандартной
структуры (см. рис. 3.1), где будем полагать
![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]() с,
с,![]() с,
с,![]() с.
с.
Передаточная функция разомкнутой системы будет равна
 .
.
Найдем
дифференциальное уравнение разомкнутой
системы, связывающее y
и e:
![]() .
.
Коэффициенты
этого уравнения
![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]() .
.
Уравнение
для определения
![]() имеет вид
имеет вид
 ,
,
откуда
![]() ,
,![]() ,
,![]() ,
,![]() .
.
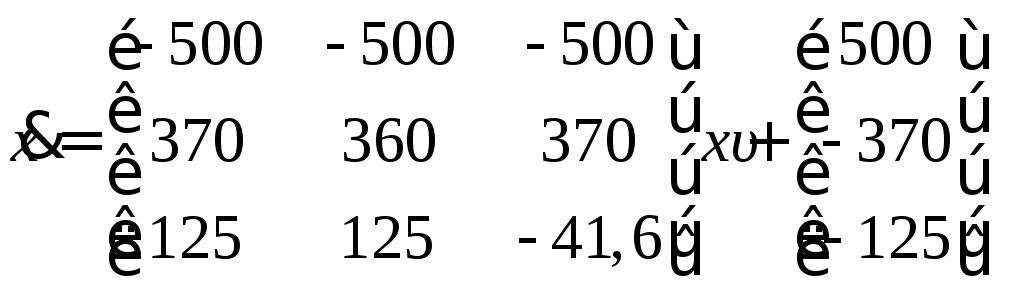
Итак, уравнения состояния разомкнутой системы в нормальной форме имеют вид
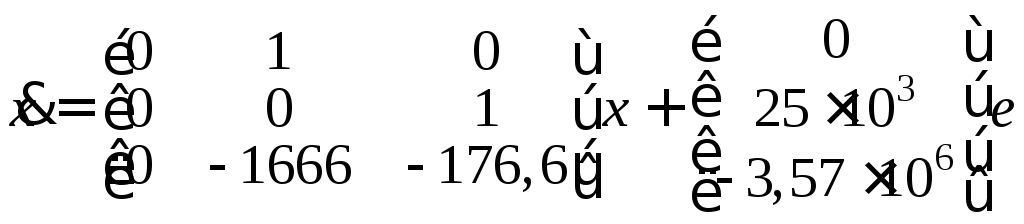 ,
,
![]() .
(8.20)
.
(8.20)
Для
получения уравнений состояния замкнутой
системы учтем уравнение замыкания
![]() ,
после подстановки
которого в (8.20)
получим
,
после подстановки
которого в (8.20)
получим
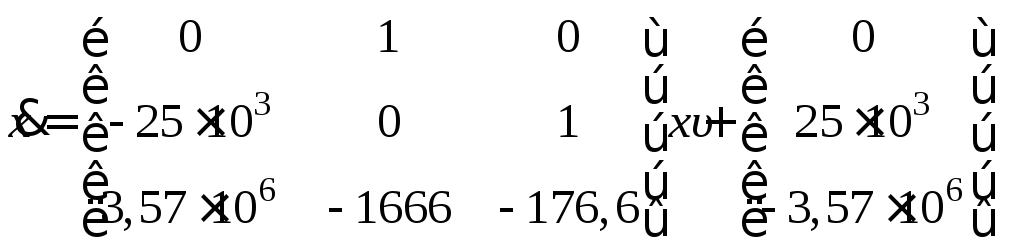 ,
,
![]() .
(8.21)
.
(8.21)
Уравнения состояния замкнутой системы (8.21) уже не являются уравнениями в нормальной форме.
8.5. Каноническая форма уравнений состояния одномерной системы
Для
получения уравнений состояния одномерной
системы в
канонической
форме используется передаточная функция
системы. Будем полагать, что система
описывается дифференциальным уравнением
(8.16), которому соответствует передаточная
функция
 .
.
Пусть
характеристическое уравнение системы
имеет n
различных корней
![]() ,
тогда передаточную функцию можно
представить в виде
,
тогда передаточную функцию можно
представить в виде
 .
(8.22)
.
(8.22)
Очевидно,
что в этом случае
![]() .
.
Обозначим
![]() ,
тогда
,
тогда![]() ,
,![]() .
.
Перейдем
в операторных соотношениях к оригиналам,
полагая
![]() .
Получим
.
Получим![]() ,
,![]() ,
,![]() .
.
Вводя
вектор состояния
![]() ,
запишем полученные уравнения в виде
уравнений состояния
,
запишем полученные уравнения в виде
уравнений состояния
 .
(8.23)
.
(8.23)
Итак,
получили уравнения состояния в
канонической форме с диагональной
матрицей коэффициентов, где в общем
случае элементы
![]() ,
,![]() матриц могут быть и комплексными
величинами.
матриц могут быть и комплексными
величинами.
Из
(8.22) можно получить другую каноническую
форму уравнений состояния. Если обозначить
![]() ,
то проводя аналогичные рассуждения,
получим уравнения состояния:
,
то проводя аналогичные рассуждения,
получим уравнения состояния:
 ,
,
![]() .
(8.24)
.
(8.24)
Рассмотрим
теперь случай кратных корней. Пусть
характеристическое уравнение имеет
корни
![]() кратностиk,
а остальные корни
кратностиk,
а остальные корни
![]() простые.
простые.
Тогда передаточную функцию можно представить в виде разложения
![]() ,
,
где
 ,
,
 .
.
в
этом случае
 или
или
![]() .
.
Между
изображениями
![]() существует связь
существует связь![]()
![]() .
Полагая
.
Полагая![]() и переходя к оригиналам, получим в
области оригиналов:
и переходя к оригиналам, получим в
области оригиналов:![]()
![]() ;
;![]() ;
;![]()
![]() ;
;![]() .
.
Вводя
вектор состояния
![]() ,
полученные соотношения запишем в
векторно-матричной форме:
,
полученные соотношения запишем в
векторно-матричной форме:
(8.25)
Уравнения
состояния (8.25) имеют каноническую форму,
основная матрица – форму Жордана. Корню
кратности k
соответствует клетка Жордана размерностью
![]() .
Очевидно, при наличии нескольких кратных
корней будем получать соответствующие
клетки Жордана для каждого корня.
.
Очевидно, при наличии нескольких кратных
корней будем получать соответствующие
клетки Жордана для каждого корня.
Пример
8.6. Обратимся
к системе управления из примера 8.5 и
найдем уравнения состояния в канонической
форме для разомкнутой системы.
Характеристическое уравнение разомкнутой
системы
![]() имеет три различных корня:
имеет три различных корня:![]() ,
,![]() ,
,![]() .
Используя выражение
.
Используя выражение ,
находим величины
,
находим величины
![]() :
:![]() ,
,![]() ,
,![]() .
Таким образом, уравнения состояния в
канонической форме для разомкнутой
системы имеют вид
.
Таким образом, уравнения состояния в
канонической форме для разомкнутой
системы имеют вид
 ,
,
![]() .
.
С
учетом уравнения замыкания
![]() нетрудно получить следующие уравнения
состояния замкнутой системы:
нетрудно получить следующие уравнения
состояния замкнутой системы:
 ,
,
![]() (8.26)
(8.26)
Сравнивая (8.21) и (8.26), видим, что одна и та же система описывается разными уравнениями состояния, которые эквивалентны между собой.