

5.3. Критерий устойчивости Михайлова
Этот
критерий относится к группе частотных
и был предложен в 1938 г.
А. Михайловым. Он базируется на
известном в теории функции комплексного
переменного принципе аргумента.
Характеристический полином замкнутой
системы представим в виде
![]() ,
где
,
где![]() – корни уравнения
– корни уравнения![]() .
.
Сделаем
замену
![]() ,
тогда
,
тогда![]() .
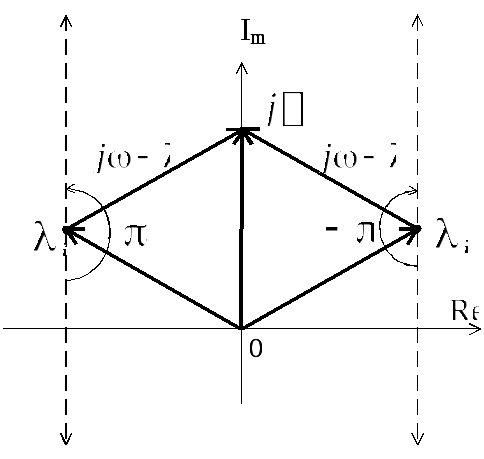
Приращение аргумента вектора
.
Приращение аргумента вектора![]() при изменении частоты
при изменении частоты![]() от
от![]() до
до![]() будет равно
будет равно![]() для левого корня и
для левого корня и![]() для правого корня (рис. 5.1). Приращение
аргумента вектора
для правого корня (рис. 5.1). Приращение
аргумента вектора![]() ,
имеющего
,
имеющего![]() правых и
правых и![]() левых корней, будет равно
левых корней, будет равно![]() ,
а при изменении
,
а при изменении![]() от 0 до
от 0 до![]() –
в 2 раза меньше, т.е.
–
в 2 раза меньше, т.е.![]() .
.
|
Рис. 5.1
|
Из последнего
выражения следует, что для устойчивой
САУ
Полином D(s)
после замены
где
|
Изменяя
![]() от нуля до
от нуля до
![]() ,
на комплексной плоскости строится
годограф, который называетсякpивой
Mиxайлова.
При
,
на комплексной плоскости строится
годограф, который называетсякpивой
Mиxайлова.
При
![]() он всегда будет находиться на действительной
оси в точке
он всегда будет находиться на действительной
оси в точке![]() ,
а при
,
а при![]() значенияХ
и Y
равны
значенияХ
и Y
равны
![]() или
или![]() ,
т.е. годограф будет уходить в бесконечность
в каком-либо квадранте комплексной
плоскости.
,
т.е. годограф будет уходить в бесконечность
в каком-либо квадранте комплексной
плоскости.
Кpитepий
Миxайлова.
Для устойчивости линейной системы
необходимо
и достаточно, чтобы
приращение аргумента функции
![]() при изменении
при изменении![]() от нуля до
от нуля до
![]() равнялось
равнялось![]() ,
что означает последовательное прохождение
кривой Михайловаn
квадрантов
против часовой стрелки в комплексной
плоскости.
,
что означает последовательное прохождение
кривой Михайловаn
квадрантов
против часовой стрелки в комплексной
плоскости.
Обычно критерий Михайлова применяется после проверки необходимого условия устойчивости (5.3).
На рис. 5.2 представлен ряд кривых Михайлова для систем различного порядка.
Кривые
1, 2
соответствуют устойчивым системам при
n
= 3, 4
соответственно, кривая 3 – неустойчивой
системе при
![]() ,
так как нарушена последовательность
прохождения квадратов комплексной
плоскости.
,
так как нарушена последовательность
прохождения квадратов комплексной
плоскости.
|
Рис. 5.2 |
Рассмотрим
определение с помощью кривой Михайлова
границ устойчивости. Система будет
находиться на границе устойчивости,
если чисто мнимая величина
|

риодическую
границу, при
![]() – колебательную,
– колебательную,![]() соответствует бесконечному корню. При
этом следует проверить, чтобывсе
остальные
корни были левыми. Такую проверку можно
осуществить, исследуя соответствующий
график кривой Михайлова в точке
пересечения начала координат. Если
малые деформации кривой приводят к
устойчивой системе, то это соответствует
границе устойчивости.
соответствует бесконечному корню. При
этом следует проверить, чтобывсе
остальные
корни были левыми. Такую проверку можно
осуществить, исследуя соответствующий
график кривой Михайлова в точке
пересечения начала координат. Если
малые деформации кривой приводят к
устойчивой системе, то это соответствует
границе устойчивости.
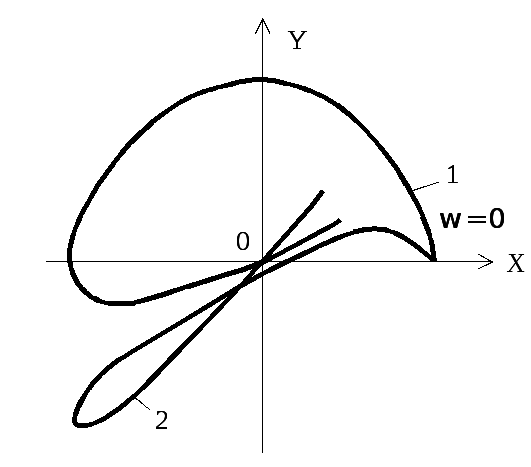
На рис. 5.3 представлены два годографа, проходящие через начало координат.
|
Рис. 5.3 |
Для кривой 1 малые деформации ее в начале координат приведут к устойчивой системе, что соответствует границе устойчивости, а для кривой 2 система при малых деформациях графика все равно будет неустойчивой.
Пример 5.4.Передаточная функция разомкнутой
системы имеет вид |
![]() ,
,
![]() кривая Михайлова при
кривая Михайлова при![]() будет начинаться на действительной оси
в точке с координатами (K,
j0)
и всегда проходить последовательно
первый и второй квадранты комплексной
области, так как мнимая часть
будет начинаться на действительной оси
в точке с координатами (K,
j0)
и всегда проходить последовательно
первый и второй квадранты комплексной
области, так как мнимая часть
![]() всегда
положительна, а действительная с ростомW
меняет знак с плюса на минус.
всегда
положительна, а действительная с ростомW
меняет знак с плюса на минус.
Система при любых K > 0, T > 0 всегда устойчива, что совпадает с результатом примера 5.1.