

2. Математична модель в системі управління
Математичне моделювання і розрахунки, які виконуються в технології, є лише окремим елементом двох видів діяльності. Перший – створення деякого технічного об’єкта, в тому числі технологічного процесу (це робота проектантів, конструкторів, технологів, дослідників), другий - оптимальна організація роботи технічної системи і управління технологічним процесом (робота експлуатаційників).
Проблеми управління технологічним процесом виходять за межі спеціальних дисциплін і складають предмет окремого розгляду в рамках понять технічної кібернетики. Не розглядаючи тут кібернетику в цілому, ми відокремимо декілька зв’язаних понять і закономірностей управління, які необхідно розуміти для того, щоб усвідомлено оцінювати місце, роль і завдання математичного моделювання в предметній технічній галузі – в даному випадку в електрохімії та електрохімічній технології.
2.1. Головні поняття технічної кібернетики
Кібернетика – наука про управління. Термін походить від грецького слова «кібер»- руль корабля, його ввів ще старогрецький філософ Платон, а французький фізик Ампер (1834 р) назвав так науку про управління державою. Сучасна кібернетика як наука веде свій початок з 1948 р, коли вийшла з друку книга професора математики Масачусетського технологічного інституту (США) Норберта Вінера «Кібернетика, або управління і зв'язок в тварині і машині»
Кібернетична система – система, яка діє для досягнення мети. Сюди належать всі біологічні об’єкти та технічні системи, які спеціально сконструйовані для виконання деякої конкретно визначеної функції. Такі системи є кібернетичними виключно в процесі виконання відповідної функції. Функцією біологічних об’єктів є саме життя.
У всіх кібернетичних систем, як біологічних так і технічних, спільною є загальна структура, елементи цієї структури і схема управління в процесі виконання функції, наведена на рис.2.1.
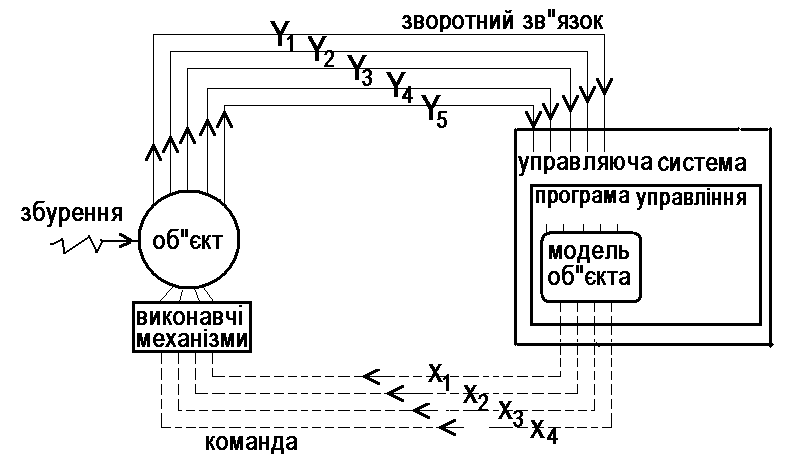
Рис. 2.1. Функціональна схема кібернетичної системи, або системи управляння.
Головним елементом в кібернетичній схемі є сам об’єкт, який функціонує для досягнення деякої конкретної мети. В технологічних системах ця мета очевидна –виробництво продукту. Стан об’єкта, при якому він вважається задовільно функціонуючим, в процесі функціонування змінюється з часом. На схемі рис. 2.1 це показано стрілкою «збурення», що означає неконтрольований (а часто невідомий чи випадковий і непередбачуваний) вплив оточуючого середовища на систему. Наприклад, з часом зменшуються каталітичні властивості електродної поверхні, зменшується гідравлічна проникність сепаратора і зростає його електричний опір, накопичуються шкідливі домішки в електролітах, і багато інших, найчастіше відомих і якісно передбачуваних явищ, рівень дії яких прогнозувати неможливо .
Стан об’єкта – це окрема неповторна комбінація кількісних та якісних значень параметрів, Y1, Y2,Y3…YN , х1…хМ, фіксованих контролюючими органами (приладами), така, що відрізняється від інших можливих комбінацій. Це визначення означає, що відхилення числового значення навіть одного параметра на величину, яку помічає відповідний контролюючий прилад, вважається як перехід об’єкта до іншого (сусіднього) стану.
Важливою характеристикою об’єкта є кількість його можливих станів NCT. Вона залежить від того, скільки параметрів контролюється у об’єкта, і з якою різницею x, Y відповідний прилад здатний гарантовано розпізнати два сусідні значення кожного параметра:
![]() (2.1)
(2.1)
З наведеного виразу можна зробити висновок, що чим більша чутливість вимірювальних та регулюючих приладів (тобто чим менші значення x, Y) , тим більшу кількість станів зможе розрізняти управляюча система і тим точнішим і ефективнішим буде управління об’єктом .
дозволені і заборонені стани. Стани об’єкта, які визначаються розрахунками математичної моделі, можуть бути дозволені і заборонені (законами природи). Забороненими, наприклад, будуть стани з концентрацією речовини в розчині, яка перевищує межу розчинності (за виключенням особливих ситуацій існування термодинамічно нестійких пересичених розчинів). На рис.2.2 наведено простий приклад електроліту LiOH в водно-літієвих хімічних джерелах струму як керованої системи з двома параметрами електроліту Y, його характеризуючими – температурою та концентрацією. Кожний окремий стан на рисунку зображується точкою на площині графіка в координатах Y1-Y2 В даному випадку дозволену двохкоординатну область існування станів можна відобразити на площині. Вона має форму чотирикутника і обмежена чотирма лініями: відрізком осі температур (відокремлює дійсні концентрації від недозволених від’ємних), верхньою лінією температури кипіння і нижньою –температури замерзання розчину LiOH, а також правою лінією межі розчинності LiOH в воді. За межами чотирикутника розташована область заборонених станів. Заборонені стани можуть виникати в результаті неточних або невірних розрахунків математичної моделі, але реально вони не існують.
Регламентована область. В області дозволених станів не всі стани є прийнятними для даної технологічної системи. Наприклад, в роботі джерела струму при температурах, які перевищують 50оС, або при низьких концентраціях LiOH літій бурхливо і неконтрольовано взаємодіє з водою. При великих же концентраціях, близьких до межі розчинності LiOH має місце надмірно низька швидкість процесу. Тому в межах дозволеної області в технологічних системах завжди існує ще менша за розміром робоча або регламентована (тобто обмежена технологічним регламентом) область станів.
Оптимальна область. Традиційні технологічні регламенти процесів вказують верхню і нижню межі допустимих коливань кожного параметра. Але навіть в рамках регламентованої області різні стани розчину нерівноцінні. Без доказів можна стверджувати, що всередині регламентованої області повинна існувати ще менша за розмірами область найкращих (оптимальних) станів, або навіть єдиний оптимальний стан. Окремі незалежні алгоритми пошуку таких станів складають предмет розгляду розділу «оптимізація технологічних систем».
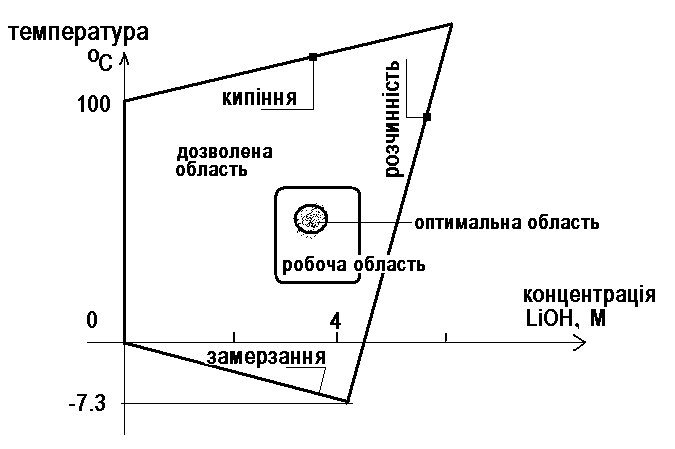
Рис.2.2. Стани розчину гідроксиду літію
Фазові траєкторії. Таким терміном позначають поступовий дрейф параметрів об’єкта від деякого початкового стану. Дрейф, або поступове зміщення станів виникає як результат постійної дії різних зовнішніх чи внутрішніх факторів (збурень), або як реакція об’єкта на миттєву регулюючу дію (наприклад, вмикання або вимикання або зміну величини струму). Такі траєкторії потрібно знати для того, щоб передбачити можливість самовільного виходу об’єкта в нерегламентовану, або навіть потенційно аварійну область станів, а також для того, щоб знати способи примусового переводу об’єкта в потрібний стан. Можливі типові траєкторії, які виникають після примусової регулюючої дії на об’єкт, наведені на рис. 2.3.
На рис. 2.3а показаний найбільш характерний для більшості технологічних процесів тип фазових траєкторій. Сукупність таких траєкторій, які відрізняються положенням початкового стану і заповняють всю область станів, називають фазовим портретом об’єкта. Характерна особливість цієї системи траєкторій є те, що з якого б початкового стану не починалась траєкторія руху об’єкта після короткочасних збурень (примусового переводу в різні початкові стани), вона закінчується в одному і тому ж стані. Цю точку на графіку називають сингулярною точкою, їй відповідає стаціонарний режим роботи об’єкта.
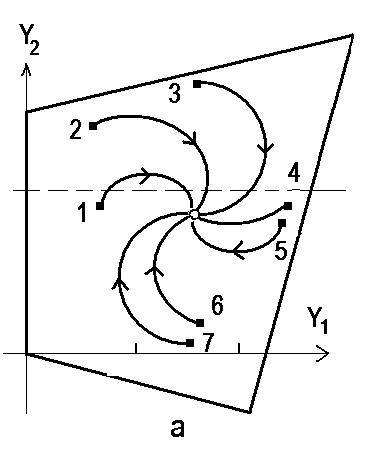
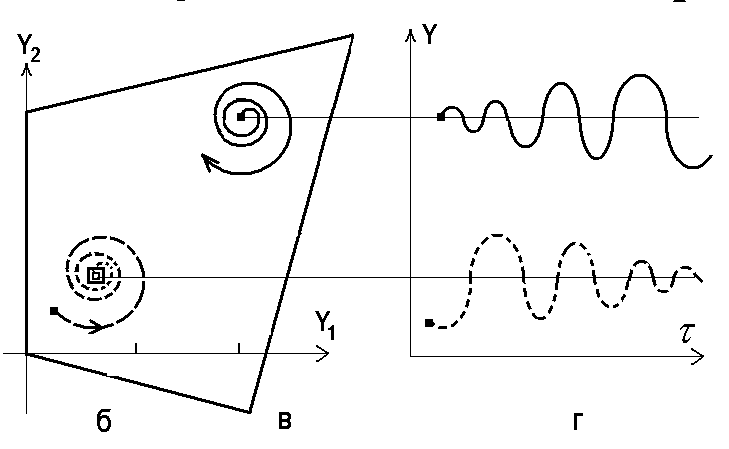
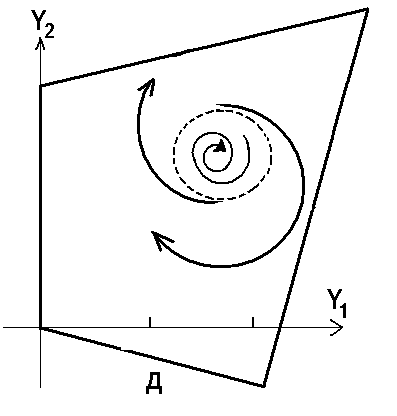
Рис. 2.3. Можливі фазові траєкторії станів системи з двома параметрами
Аналіз фазових траєкторій дає важливу інформацію про поведінку об’єкта. Наприклад, якщо рисунок 2.3.а розглядати як фазовий портрет електроліту LiOH в джерелі струму, тоді теоретичні (розраховані на математичній моделі) траєкторії 1-3 треба вважати небезпечними, бо вони хоч і ведуть до нормального стаціонарного режиму, але проходять через небезпечну область, обмежену температурною межею (на рисунку показана штриховою лінією).
Перехід до стаціонарного стану може мати вигляд спіралі, що скручується в напрямку до сингулярної точки, як на рис. 2.3.б. При цьому динамічні характеристики об’єкта Y1(),Y2() матимуть такий вигляд як штрихова лінія на рис.2.3г – затухаючі періодичні коливання. Об’єкт, що веде себе таким чином (фазові траєкторії а,б), з точки зору управління є стійким, бо короткочасні випадкові збурення приводять його через деякий час (або одразу, або через декілька коливань) в попередній стан стаціонарного режиму.
На рис. 2.3в наведена фазова траєкторія об’єкта в формі спіралі, що розкручується. Тут параметри об’єкта після короткочасного збурення коливаються, а амплітуда коливань з часом зростає. Оскільки зростання не може бути безмежним, то це означає , що через деякий час об’єкт перейде в нерегламентовану область станів, або навіть в аварійний стан. В даному випадку система нестійка. В технології такі системи нечасто, але зустрічаються в тих випадках, коли в системі існує додаткове внутрішнє джерело енергії.
Аналогічні, але помірніші ефекти можна проілюструвати на фазовій траєкторії рис.2.3д. Об’єкт стійко працює в стаціонарному режимі, і при невеликих збуреннях повертається до нього. Така ситуація позначається терміном «стійкий в малому». При значних же збуреннях фазова траєкторія об’єкта також має вигляд спіралі, що скручується всередину, але переходить не до стаціонарного режиму, а в режим незатухаючих коливань параметрів. На фазовому портреті об’єкта йому відповідає замкнутий контур, показаний штриховою лінією.
Управляюча
система
– система, яка коригує
відхилення
стану об’єкта управління від мети
функціювання. Управляюча система діє
за програмою
управління.
Складовою частиною цієї програми і є
інформація про властивості об’єкта,
тобто його модель,
яка в сучасних технічних системах з
комп’ютерним управлінням має форму
звичайної математичної моделі (1.1)
![]() .
.
Для того, щоб кібернетична система безперервно працювала, управляюча система також безперервно (регулярно з деяким часовим інтервалом ) повинна одержувати освідомлювальну інформацію про стан об’єкта в даний момент часу, тобто поточні тимчасові значення параметрів Y1,Y2,Y3…YN. Вони або ж залишаються на заданих рівнях, або змінюються під дією зовнішніх чи внутрішніх збурень. Цю інформацію управляюча система в технології одержує за допомогою різних приладів. Після кожного її оновлення система управління переробляє одержані дані у відповідності з алгоритмом управління. Головною частиною цього алгоритму є вирішення математичної моделі (1.1) для того, щоб визначити необхідні значення регульованих параметрів х1…хМ. Ця вихідна інформація як команда і поступає на виконавчі механізми.
Виконавчі механізми – технічні пристрої, за допомогою яких регулюють кількісні рівні параметрів (струми, напруги, швидкості потоків, тощо), вмикають або вимикають електричні прилади, крани та вентилі на гідравлічних лініях, тощо.
Таким чином, в схемі функціонування кібернетичної (синонім слова «керованої, управляємої» ) системи здійснюється безперервний потік інформації в двох протилежних напрямках –прямий потік управляючої інформації (команди) від управляючої системи до об’єкта, і зворотний потік освідомлювальної інформації від об’єкта до управляючої системи.
Закономірності роботи кібернетичних систем
А. Головний механізм впливу збурень, показаних на схемі кібернетичної системи рис. 2.1 , формулює 2-й закон термодинаміки: в ізольованій системі всі самовільні процеси приводять до зростання ентропії, дезорганізації і безпорядку. Самовільними процесами в системах електрохімічної технології є корозійні процеси, старіння матеріалів та електролітів, пасивація електродів і каталізаторів, хімічні реакції за участю компонентів навколишнього середовища, тощо.
В кінці дії таких процесів система переходить в неробочий стан, а ентропія досягає максимуму. Максимум ентропії означає, що об’єкт з однаковою імовірністю може виявитись в будь-якому з дозволених станів. З точки зору управління процесом це ж твердження можна сформулювати точніше: при максимальній ентропії імовірність того, що стан об’єкта виявиться в робочій області, близька до нуля.
Б. Ступінь організованості. Кібернетичну систему можна назвати управляємою (організованою) , якщо вона здатна протягом тривалого часу утримувати об’єкт в межах робочої (регламентованої або оптимальної) області станів. Ступінь організованості системи тим більша, чим менший розмір робочої області, максимальною вона могла б бути, якщо б об’єкт утримувався в якомусь єдиному оптимальному стані.
Ступінь організованості кібернетичної системи, тобто якість управління, неважко визначити кількісно. Можна також визначити ступінь «неорганізованості», як структурну ентропію, скориставшись формулою Больцмана, яка була виведена в рамках молекулярно-кінетичної теорії будови речовини для статистичних систем з великої кількості станів (10 і більше порядків):
![]() ,
(2.2)
,
(2.2)
де k=1.3810-23 Дж/К , W- термодинамічна імовірність стану, в даному випадку – кількість станів. Математичну імовірність стану можна визначити як результат ділення кількості станів у відповідній області (робочій або оптимальній) на загальну кількість станів NCT.
В. Завдання управління об’єктом полягає в тому, щоб при безперервній дії збурень утримувати об’єкт в межах робочої області або в ще меншій оптимальній області станів.
Таким чином, дія постійно діючих збурень у відповідності з 2-м законом термодинаміки намагається вивести об’єкт з регламентованої області станів, а система управління протидіє цьому шляхом періодичних короткочасних регулюючих дій, які виконуються виконавчими органами за командами управляючої системи.
Г. Управляюча система по функціональному відношенню до об’єкта є частиною «зовнішнього середовища» – її дія на об’єкт також має форму короткочасного збурення. Різниця полягає лише в тому, що «зовнішнє середовище» діє непередбачуваним чином, а управляюча система виконує точно розраховану дію, внаслідок якої об’єкт переходить в заданий стан. Сам по собі ізольований об’єкт не здатний функціонувати без управляючої системи.
Д. Існування кібернетичної системи неможливе без інформаційних потоків. В управлінні циркулює інформація двох типів:
– Ознайомлювальна інформація про те, в якому стані знаходиться об’єкт в момент спостереження. Цю інформацію дають вимірювальні прилади та органи чуття.
– Інформація про те, як управляти станом об’єкта. Ця інформація також містить три головні частини:
знання властивостей об’єкта і траєкторій його руху, які містяться в математичній моделі об’єкта;
знання способів знаходження оптимальних станів;
знання способів переходу від одного стану до заданого іншого, наприклад, оптимального. Це і є власне алгоритм управління.
Всі дії управляючої системи по збиранню інформації, її опрацюванні, формулюванні управлінського рішення і команди в сукупності складають програму управління.
Алгоритми управління можна грубо розділити на дві групи.
Детерміновані алгоритми управління. Вони працюють на основі математичної моделі, яка дає точну залежність між регульованими вхідними и нерегульованими вихідними параметрами, однозначно визначає поведінку об’єкта в різних умовах. Математична модель дає можливість точно визначити дію, яка приведе об’єкт в заданий стан. Недолік детермінованого алгоритму – нечутливість до дії факторів, які не передбачені в математичній моделі. Такий алгоритм не здатний виконувати правильні дії по управлінню об’єктом в умовах, коли з часом змінюється поведінка «навколишнього середовища».
Адаптивні алгоритми управління. На відміну від детермінованих, в адаптивних алгоритмах математична модель об’єкта (1.1) не використовується взагалі, а зв’язки між параметрами Y1, Y2,Y3…YN та х1…хМ встановлюються лише шляхом пробних дослідів на самому об’єкті, тобто в процесі управління. Сам алгоритм простий - він пробує різні випадкові дії, аналізує результат цієї дії, і обирає найкращий варіант. Одночасно запам’ятовує свої дії і їх результати, тобто в процесі управління «навчається».
Адаптивні алгоритми мають ту перевагу, що вони здатні правильно реагувати на будь-які непередбачувані ситуації, навчатись в процесі управління і вдосконалюватись. Недоліком адаптивних алгоритмів є повільність їх роботи – для навчання потрібно витрачати час.
Інформація та інформаційні процеси