

14_08_18_ТАУ_1,2_Лекционный курс
.pdfV (ω ) = −K |
|
|
2ξTω |
|
. |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
2 |
|
|
|
|
|
(6.75) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
(1− T 2ω2 ) + (2ξTω )2 |
|
|||||||||||
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
K |
|
|
|
|
A(ω ) = U(ω)2 +V (ω)2 = |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
. |
|||||||
|
|
|
|
|
|
|
||||||||
(1 −T 2ω2 )2 |
|
|||||||||||||
|
|
|
|
|
|
|
|
+ (2ξTω )2 |
(6.76) |
|||||
|
|
|
|
|
|
|
|
2ξTω |
|
|
|
|
||
ϕ(ω) = arctg |
V (ω) |
= −arctg |
. |
|
(6.77) |
|||||||||
|
|
|
||||||||||||
|
|
U (ω) |
|
|
|
|
1 − T 2ω2 |
|
|
|
||||
6.6.2. Пример звена второго порядка
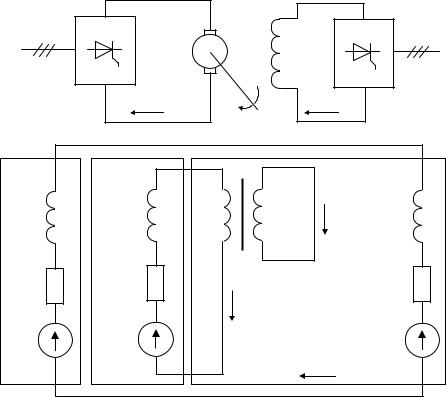
Примером звена второго порядка может служить математическое описание двигателя постоянного тока при управлении по цепи якоря и постоянном магнитном потоке (рис. 6.18).
ω
U 
I M
P
Рисунок 6.18 - Механизм подъема груза
Двигатель постоянного тока с независимым возбуждением ДПT - наиболее распространенный тип двигателей постоянного тока. При его рассмотрении будем считать, что размагничивающее действие реакции якоря компенсировано, а индуктивность якорной цепи постоянная. Действие вихревых токов, проявляющееся при изменении магнитного потока, учитывается как действие короткозамкнутой обмотки, расположенной на полюсах.
61
|
ТПЯ |
ДПT |
|
|
|
ТПВ |
|
|
|
|
|
|
|
|
|
сеть |
еd |
|
ОВ |
еdв |
|
|
сеть |
~ |
|
|
|
|
~ |
||
|
I |
|
|
iв |
|
|
|
|
|
|
ω, М |
|
|
а) |
|
|
|
|
|
|
|
||
ТПЯ |
ТПВ |
|
|
|
|
ДПС |
|
L |
Lпрв |
Lв |
|
Lвт |
i |
L |
я |
пр |
|
Rв |
|
Rвт |
вт |
|
|
|
|
|
|
|
|
||
Rпр |
Rпрв |
|
М |
|
|
|
|
|
iв |
|
|
Rя |
|||
|
|
|
|
|
|
|
|
ed |
edв |
|
|
|
|
eдв |
|
|
|
|
|
I |
|
|
|
|
|
|
|
|
|
|
б) |
Рисунок 6.19 - Силовая часть электроприводу постоянного тока: а - принципиальная схема, б - схема замещения
Двигатель постоянного тока ДПT (рис. 6.19) имеет обмотку якоря и обмотку возбуждения, которые получают питание от независимых источников постоянного тока ТПЯ и ТПВ . К якорю двигателя с моментом инерции J , который вращается с частотой ω , приложен электромагнитный момент M , под действием которого механическая часть электропривода приводится в движение.
Переходные процессы, которые протекают в двигателе постоянного тока, с учетом механической и электромагнитной инерции, описываются следующими уравнениями.
•уравнение электрического равновесия для цепи якоря;
•уравнение связи электромагнитного момента и тока двигателя;
•уравнение, связи электродвижущей силы (ЕДС) двигателя и частоты вращения;
•уравнение движения электропривода.
62

|
е = (R |
я |
+ R )i + (L |
я |
+ L ) |
||
|
d |
|
пр |
пр |
|||
|
|
|
|
|
|
|
|
М = СФi |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
едв = СФω |
|
|
|||||
|
М − Мс = J |
dω |
|
|
|
||
|
|
|
|
||||
dt |
|
|
|||||
|
|
|
|
|
|
||
di + eдв dt
. (6.78)
Система уравнений (6.78) позволяет проанализировать динамические особенности ДПТ как объекта управления, пользуясь методами теории автоматического управления.
Введем понятие электромагнитной постоянной времени цепи якоря:
Тэ = |
Lэ |
, |
|
|
|
|
(6.79) |
||||
Rэ |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
где R |
я |
+ R |
= R |
- активное сопротивление цепи якоря; L |
я |
+ L |
пр |
= L |
э |
- |
|
|
пр |
э |
|
|
|
|
|||||
индуктивность цепи якоря.
С учетом формулы (6.79) уравнение электрического уравнения для цепи якоря в операторной форме запишется в виде:
ed = Rэ(1+Tэs)i + eдв . (6.80) По аналогии с электромагнитной постоянной времени введем понятие
электромеханической постоянной времени Тм :
Т |
= |
Jωо |
, |
(6.81) |
|
||||
м |
|
Mкз |
||
|
|
|
||
где Тм |
- это время, в течение которого привод с моментом инерции J при |
|||
динамическом моменте, равном моменту короткого замыкания Мкз , достигнет скорости идеального холостого хода ωо.
В уравнении (6.81) неизвестны Мкз и ωо. Для их определения воспользуемся механической характеристикой двигателя постоянного тока. Рассмотрим точки короткого замыкания и идеального холостого хода.
Режим установившегося короткого замыкания (s = 0, ω = 0, едв = 0 ). Второе уравнение системы (6.78) и уравнение (6.80) запишутся в виде:
М = Мкз = СФIкз , |
(6.82) |
где Ф - магнитный поток, С- конструктивная постоянная двигателя.
63

еd = RэIкз . |
(6.83) |
Выразим из формулы (6.21) Iкз и подставим полученное значение в |
|
(6.81): |
|
Мкз = СФ |
еd |
. |
(6.84) |
|
|||
|
Rэ |
|
|
Режим установившегося идеального холостого хода ( S = 0, |
I = 0, |
||
ω = ωо). |
|
||
ЭДС двигателя в соответствии с третьим уравнением системы (6-73) и уравнением (6.80):
едво = еd = СФωо. |
(6.85) |
||||
Скорость идеального холостого хода: |
|
||||
ω |
|
= |
еd |
. |
(6.86) |
о |
|
||||
|
|
СФ |
|
||
|
|
|
|
||
Уравнение (6.81) с учетом (6.84) и (6.86) представим в виде: |
|
||||
|
|
J |
ed |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
JRэ . |
|
||
Тм = |
|
СФ |
|
(6.87) |
|||||||||
|
|
|
|||||||||||
|
|
|
|
|
|
= |
|
|
|
||||
|
|
|
|
|
|
С2Ф2 |
|||||||
|
|
|
|
|
e |
|
|||||||
|
СФ |
|
|
d |
|
|
|
|
|
||||
|
Rэ |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|||||
Преобразуем уравнение движения: |
|
||||||||||||
М − Мс = Jsω . |
|
|
|
(6.88) |
|||||||||
Учитывая второе уравнение системы (6.78), получим: |
|
||||||||||||
i − iс = |
J |
|
sω . |
|
|
|
(6.89) |
||||||
|
|
|
|
|
|
|
|||||||
|
|
СФ |
|
|
|
|
|||||||
Заменим J СФ в соответствии с формулой (6.87): |
|
||||||||||||
i − iс = |
Tм |
СФsω . |
|
|
(6.90) |
||||||||
Rэ |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||
На основании выражений (6.80), (6.90) решим систему уравнений (6.78) относительно тока, скорости и ЕДС двигателя:
64

|
|
= |
|
ed − eдв |
||||
i |
|
|
|
|
|
|
||
|
Rэ(Tэs |
+1) |
|
|
||||
|
|
|
|
|
|
|||
|
|
|
|
|
|
Rэ . |
||
ω = (i − ic) |
|
|
(6.91) |
|||||
|
||||||||
|
|
|
|
|
|
TмСФs |
||
e |
|
|
= CФω |
|||||
|
дв |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
Система (6.91) описывает переходные процессы в двигателе постоянного тока с учетом электромагнитной и механической инерции. Представим эту систему в виде структурной схемы, входами которой является ЭДС преобразователя, питающего якорную цепь и ток нагрузки, выходом - частота вращения двигателя.
ED |
|
|
|
|
|
I |
iс |
eдв |
|
|
|
|
||||||
|
|
|
1 Rэ |
|
|
|
|
Rэ |
|
|
1 |
|
ω |
|||||
|
|
|
|
|
||||||||||||||
|
|
|
|
|
Тэs +1 |
|
|
|
|
Т мs |
|
|
|
СФ |
|
|||
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 6.20 - Структурная схема двигателя постоянного тока без учета контура возбуждения
Передаточная функция двигателя в соответствии с рис. 6.20:
|
|
|
|
|
1/ Rэ |
|
Rэ |
|
|
|
1 |
|
|
|
|
|||||||
|
ω(s) |
|
|
|
|
|
× |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Wдв(s) = |
|
|
|
Tэs +1 Tмs |
1 |
|
|
СФ |
. |
(6.92) |
||||||||||||
|
= |
|
|
|
|
|
|
|
× |
|
= |
|
|
|
|
|
||||||
ed ( s) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
1 |
|
|
1/ Rэ |
|
× |
Rэ |
|
СФ TмTэs2 +Tмs +1 |
|
|
|||||||||||
|
|
+ Tэs +1 |
Tмs |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Переходные функции двигателя изображены на рис. 6.21.
ω |
|
еd |
2 |
1.0 |
|
0.5 |
1 |
0.0 |
|
T
Рисунок 6.21 - Переходные функции двигателя постоянного тока:
1-Тм / Тэ = 4; 2-Тм / Тэ = 0.25
65

Вид переходного процесса определяется корням характеристического уравнения (6.30):
|
−Т |
м |
± |
Т 2 − 4Т |
Т |
|
|
|
|
s = |
|
|
м |
м э |
. |
|
|
(6.93) |
|
|
|
|
|
|
|
|
|||
1,2 |
|
|
|
2Т мТэ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
или Тм / Тэ ≥ 4. В этом |
|
Корни действительные при Тм |
− 4Тм Тэ |
≥ 0 |
|||||||
случае переходной процесс нарастания скорости соответствует переходному процессу в двойном апериодическом звене (рис. 6.21, кривая 1):
1
Wдв(s) = |
СФ |
. |
(6.94) |
(s − s1)(s − s2) |
|
||
|
|
|
При Тм / Тэ < 4 корни мнимые и процесс нарастания скорости будет
колебательным (рис. 6.21, кривая 2).
В качестве примера, определим переходную характеристику двигателя для структурной схемы (рис. 6.20), при условии питания двигателя от источника бесконечно большой мощности. В этом случае Lэ = Lя и Rэ = Rя .
Рассмотрим двигатель постоянного тока со следующими параметрами:
•тип П-82,
•номинальная мощность Рном = 25 кВт,
•номинальное напряжение Uном = 220 В,
• номинальная скорость nном =1000 об мин ,
мин ,
•номинальный ток Iн =133 А,
•момент инерции Jд = 0.77 кгм2 ,
•индуктивность обмотки якоря Lя = 0.308 мГн,
•активное сопротивление обмотки якоря Rя = 0.08 Ом. Определим параметры, необходимые для моделирования:
|
|
π nн |
3.14 ×1000 |
= 104.67 |
−1 |
, |
|
||||||
ωн |
= |
|
|
= |
|
|
|
|
с |
|
|
||
|
|
|
|
|
|
|
|
||||||
|
30 |
|
|
30 |
|
|
|
|
|
|
|||
|
|
Uн |
− IнRя |
|
|
220 −133× 0.08 |
|
|
|
||||
СФ = |
|
|
|
|
= |
|
|
|
= |
2 Вс , |
|||
|
ωн |
|
|
104.67 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|||
66

|
|
|
JдRя |
|
0.77 0.08 |
|
|||||
Тм |
= |
|
|
|
|
= |
|
|
= 0.0154 |
c, |
|
|
|
2Ф2 |
|
|
|||||||
|
|
|
С |
22 |
|
|
|
||||
|
|
L |
|
0.308×10−3 |
|
|
|
||||
T = |
|
|
э |
= |
|
|
|
= 3.85 10−3 с. |
|||
|
|
|
|
|
|
|
|||||
э |
|
Rэ |
|
|
0.08 |
|
|
|
|||
|
|
|
|
|
|
|
|||||
Подставив полученные |
значения в |
структурную схему (рис. 6.20), |
|||||||||
выполним моделирование. График переходной функции показан на рис. 6.22.
ω
едв
1
0.8
0.6
0.4
0.2
0
|
|
|
|
|
T |
0 |
0.02 |
0.04 |
0.06 |
0.08 |
0.1 |
Рисунок 6.22 - Результаты моделирования
7.Статический режим работы системы автоматического управления
7.1.Статическая ошибка по управлению и возмущению
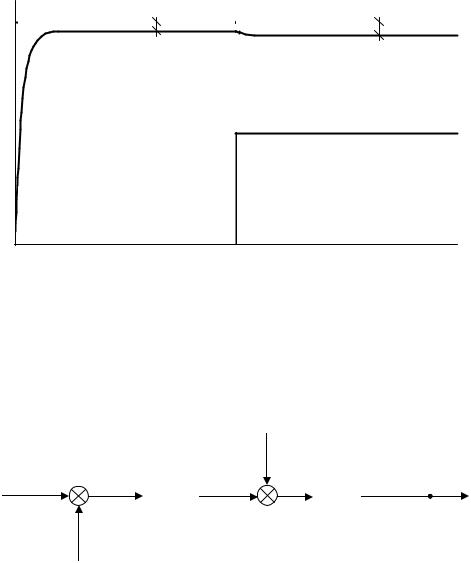
Установившийся режим работы системы автоматического управления характеризуется окончанием переходного процесса. В этом случае выходные переменные или являются постоянными величинами (статический режим работы, рис. 7.1), или изменяются с постоянной ошибкой в соответствии с изменением входного сигнала (динамический постоянный процесс, рис. 7.2).
67

X |
|
Y |
ст |
|
|
|
T |
Рисунок 7.1 - Статический режим работы |
|
ст |
Y |
X |
T |
Рисунок 7.2 - Динамический постоянный процесс Основной характеристикой установившегося режима является
статическая ошибка.
При наличии единичной обратной связи, ошибка ст определяется как разность между входным воздействием X и выходной переменной Y в
установившемся режиме (рис. 7.1, 7.2). Различают статическую ошибку по управлению и по возмущению. Статическая ошибка по управлению характеризует ошибку при отработке управляющего сигнала, а ошибка по возмущению - отклонение управляемого параметра в установившемся режиме под действием возмущения.
Статическую ошибку можно определить из передаточной функции системы, используя свойство преобразования Лапласа. Если в оригинале время T → ∞, то в выражении изображения S →0 .
68

Рассмотрим вычисление статической ошибки по управлению для системы, структурная схема которой представлена на рис. 7.3.
|
|
X(S) |
|
|
|
|
|
|
ст |
|
|
|
|
|
|
|
|
|
|
|
Y(S) |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W1(S) |
|
|
W2(S) |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xос (s) |
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
Рисунок 7.3 - Структурная схема замкнутой системы регулирования |
|
|||||||||||||||||||||||||||||||||
Статическая ошибка |
|
ст равняется: |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
ст = y ( 0) − x( 0) . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(7.1) |
||||||||||||||
Будем полагать, что W1( S) - звено регулятора, а W2 ( S) - звено объекта |
||||||||||||||||||||||||||||||||||
управления. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Для примера возьмем следующие передаточные функции: |
|
|
||||||||||||||||||||||||||||||||
W1( s) = К р , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(7.2) |
|||||||
W2 (s) = |
|
|
|
Коб |
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(7.3) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
1+ Тоб s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Передаточная функция замкнутой системы регулирования по |
||||||||||||||||||||||||||||||||||
управлению: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
К |
р |
|
|
|
|
Коб |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
y(s) |
|
|
|
|
|
|
1 + Т s |
|
К рКоб |
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
Wу ( s) = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
об |
|
|
|
|
|
|
. |
(7.4) |
|||||||||
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(1 + Тоб s) |
|
|
|
|
||||||||||||||||
|
|
|
|
|
x(s) |
1 |
+ К |
|
|
|
|
Коб |
|
|
|
+ К рКоб |
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
р 1 + Т s |
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
об |
|
|
|
|
|
|
|
|
|||||
Если приравнять S = 0, то передаточная функция будет иметь вид: |
|
|||||||||||||||||||||||||||||||||
Wу (0) = |
|
|
К рКоб |
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(7.5) |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
1+ К рКоб |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Статическая ошибка по управлению (рис. 7.4): |
|
|
|
|
|
|
||||||||||||||||||||||||||||
ст |
|
= x |
(0)Wу (0) − x(0) = x(0) |
|
К рКоб |
|
− x(0) = |
|
|
|||||||||||||||||||||||||
у |
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 + К рКоб |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
= − |
|
x(0) |
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
(7.6) |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
1+ К рКоб |
|
|
|
|
|
|
|
|
||||||||||||||||||||
69
X |
сту |
ств |
|
Y |
|
|
F |
|
|
|
T |
Рисунок 7.4 - График переходных процессов в системе при отсутствии интегратора в регуляторе и в объекте регулирования
Из формулы (7.6) видим, что чем больше коэффициент усиления регулятора, тем меньше ошибка по управлению.
Определим статическую ошибку по возмущению, используя структурную схему на рис. 7.5.
|
|
|
|
|
F(S) |
||||||
X(S) |
|
|
ст |
|
|
|
|
|
Y(S) |
||
|
|
W1(S) |
|
|
|
W2(S) |
|||||
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
xос (s) |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 7.5 - Структурная схема замкнутой системы регулирования с возмущающим воздействием F(S)
Передаточная функция замкнутой системы регулирования по возмущению:
Wв ( s) = |
y( s) |
= |
|
W2 ( s) |
|
. |
|
|
|
(7.7) |
||||||
F ( s) |
|
|
( s)W1( s) |
|
|
|
||||||||||
|
|
1+W2 |
|
|
|
|
|
|||||||||
Учитывая то, что W1( s) = К р , W2 |
(s) = |
Коб |
, получим: |
|
||||||||||||
1+ Тоб s |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Коб |
|
|
|
|
|
|
|
|
|
|
|
||
Wв ( s) = |
1 + Тоб s |
|
|
= |
|
|
Коб |
|
. |
(7.8) |
||||||
|
|
|
|
|
|
|
|
|
|
|
||||||
1 + К |
р |
|
Коб |
|
|
|
(1 + Тоб s) + К рКоб |
|
||||||||
1 + Т |
s |
|
||||||||||||||
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
об |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
70 |
|
|
|
|
|
|