

Корольов / Теория связи
.pdf4. Закодируйте сверточным кодом 12 , двоичную информационную по-
следовательность: 01110011101 . Покажите путь на решеточной диаграмме.
5. Запишите полиномы связи для сверточного кодера представленного на рис. 2.22.
6. Декодируйте сверточным кодом 12 , по алгоритму Витерби, информа-
ционную последовательность: 1111001011111011110101. Правильно ли принята эта последовательность?
281

ГЛАВА 6. СИГНАЛЫ С ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ
6.1. Методы импульсной модуляции
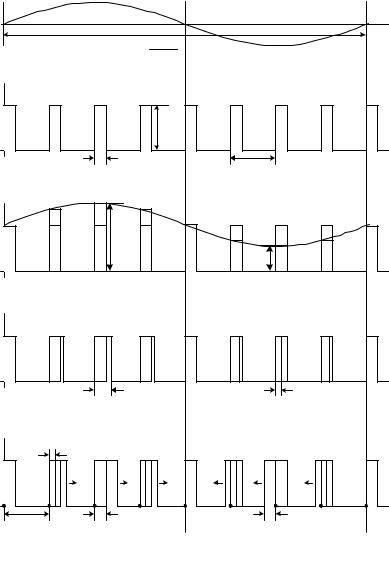
До сих пор рассматривались модулированные (манипулированные) колебания, где в качестве несущей применялось гармоническое колебание. В системах связи широко используется несущая в виде периодической последовательности видеоимпульсов. Модуляция с такой несущей называется импульсной модуляцией. Применение импульсных методов позволяет осуществить многоканальную радиосвязь с временным разделением каналов.
6.1.1. Импульсные методы передачи непрерывных сигналов
При импульсной модуляции несущее колебание имеет характер периодической последовательности импульсов (рис. 6.1,б) и может быть записано следующим выражением [32]:
∞ |
(t −t0 −kTi ), |
|
sИ (t)= s0 ∑s1 |
(6.1) |
k =−∞
где s1 (t) – функция, описывающая форму одиночного импульса, это последо-
вательность, в которой s1 (t) чаще всего прямоугольный однополярный импульс,
характеризующийся параметрами: амплитудой импульса s0 ;
длительностью импульса τ0 ;
начальной фазой t0 ;
частотой повторения (тактовая частота) Fi = 1 , обычно Ti >>τ0 .
Ti
В зависимости от параметра импульса, который подвергается модуляции различают четыре основных вида модуляции: амплитудно-импульсная (АИМ), длительно-импульсная модуляция (ДИМ) (широтно-импульсная (ШИМ)), час- тотно-импульсная (ЧИМ) и фазоимпульсная (ФИМ).
Рассмотрим пример формирования импульсно модулированных сигналов, если в качестве модулирующего сигнала взять гармоническое колебание
282
(рис. 6.1,а), а в качестве |
s |
M |
(t) |
|
|
|
|
|
||||
несущего |
периодиче- |
|
|
|
|
|
|
|
||||
а) 0 |
|
|
1 |
|
t |
|||||||
скую |
последователь- |
|
|
|
|
TM |
|
|
||||
|
|
|
|
FM |
|
|
||||||
|
|
|
|
|
sИ(t) |
|
|
|
|
|||
ность |
импульсов |
вида |
|
|
|
|
|
|||||
(6.1) (рис. 6.1,б). |
|
|
б) |
|
|
s0 |
|
|
||||
При |
АИМ |
|
(рис. |
|
|
|
|
|||||
|
|
|
|
|
t |
|||||||
6.1,в) пропорционально |
|
|
0 |
|
0 |
|
Ti |
|||||
s АИМ( t ) |
|
|
|
|||||||||
|
|
|
|
|
||||||||
модулирующему |
коле- |
|
|
|
|
smax |
|
|
|
|||
банию sM (t) изменяется |
|
|
|
|
|
smin |
|
|||||
в) |
|
|
|
|
||||||||
амплитуда импульсов, а |
|
|
0 |
|
|
|
|
t |
||||
прочие |
параметры ос- |
s ОДИМ(t ) |
|
|
|
|
|
|||||
таются неизменными. |
|
|
|
|
|
|
|
|
||||
При |
ДИМ |
(ШИМ) |
г) |
|
|
|
|
t |
||||
(рис. 6.1,г) пропорцио- |
|
|
0 |
0 |
m |
|
0 |
|||||
s ФИМ( t) |
|
m |
||||||||||
нально |
модулирующе- |
t |
|
|
|
|
||||||
му колебанию sM (t) из- |
д) |
|
|
|
|
|
||||||
меняется |
длительность |
|
|
|
|
t |
||||||
|
|
|
|
|
|
|
0 |
|
tm |
|
t m |
|
(ширина) |
импульсов. |
|
|
t0 |
|
|
|
|||||
|
|
|
Рис. 6.1. Временные |
диаграммы |
||||||||
Возможны |
два |
метода: |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|||||
ОДИМ (односторонняя ДИМ) и ДДИМ (двухсторонняя ДИМ). При ОДИМ пе- |
||||||||||||
ремещается один из фронтов, а второй при этом фиксированный. При ДДИМ |
||||||||||||
изменяются два фронта, а положение середины не меняется. |
|
|||||||||||
При ФИМ (рис. |
6.1,д) пропорционально модулирующему |
колебанию |
||||||||||
sM (t) изменяется начальная фаза, т.е. положение импульса на временной оси |
||||||||||||
относительно тактовых точек. |
|
|
|
|
|
|||||||
При ЧИМ – частота следования импульсов. |
|
|
|
|||||||||
При любом виде импульсной модуляции передача непрерывного модули- |
||||||||||||
рующего сигнала осуществляется отдельными импульсами. Чем чаще следуют |
||||||||||||
импульсы в несущем колебании, тем меньше интервал Ti , а значит, тем точнее |
||||||||||||
отображается сам модулирующий сигнал. |
|
|
|
|
||||||||
283
Частота повторения импульсов находится исходя из необходимой точности восстановления непрерывного колебания sM (t) при его демодуляции. Ми-
нимальное значение частоты повторения определяется теоремой Котельникова
Fmin = |
1 |
= 2FB где FB – максимальная частота в спектре sM (t). Так, для передачи |
|||||
∆t |
|||||||
|
|
|
|
|
|
||
телефонного сигнала с |
FB = 3400 Гц значение ∆t ≤ |
|
1 |
≤147 мксек. Обычно |
|||
2 |
3400 |
||||||
|
|
|
|
|
|||
частоту следования импульсов берут с некоторым запасом FB =8 кГц, что соот-
ветствует ∆t =125 мксек. Длительность самих импульсов в современных системах связи исчисляется долями микросекунды.
Рассмотрим, как формируется импульсно-модулированное колебание.
В импульсных системах связи, используют высокочастотное колебание, при этом модуляция осуществляется в два этапа сначала модулирующее колебание sM (t) управляет информационным параметром периодической последова-
тельности видеоимпульсов, выполняющей роль промежуточного переносчика. В результате образуется модулированная последовательность видеоимпульсов (рис. 6.1,в,г,д). На втором этапе полученная модулированная последовательность видеоимпульсов используется для манипуляции гармонического высокочастотного несущего колебания. Тем самым осуществляется перенос модулированных видеоимпульсов на частоту несущего колебания Ωi . В этом случае получается двойная модуляция. Чаще всего применяется вторичная амплитудная манипуляция. Колебания с двойной модуляцией сокращенно обозначаются пятью буквами, например ФИМ–AM (фазоимпульсная модуляция и вторичная амплитудная манипуляция), АИМ–AM.
При приеме выделение модулирующего сигнала осуществляется
также в два этапа. Сначала радиоимпульсы подвергаются демодуляции, т.е. преобразуются в короткие видеоимпульсы соответствующей высоты, а затем из импульсной последовательности выделяется модулирующее колебание. Второй этап выполняется с помощью «идеального» фильтра низких частот, пропускающего все частоты от нуля до FB . Как известно, при подаче на вход такого
284

фильтра короткого импульса выходное напряжение будет пропорционально амплитуде импульса и описывается функцией вида sinx x . В результате на выхо-
де фильтра получается исходное колебание в соответствии с рядом Ко-
тельникова (п. 1.5).
Заметим, что спектр реальных колебаний не имеет резкого ограничения по частоте, а идеальный ФНЧ нереализуем, поэтому восстановление гда осуществляется приближенно.
6.1.2. Спектральные характеристики импульсных модуляции
Представление о спектральном составе импульсно-модулированных колебаний можно получить, рассмотрев спектр при АИМ.
Спектр модулирующего колебания представлен одной составляющей на частоте FM (рис. 6.2,а). Спектр несущего колебания определяется периодической последовательностью импульсов (рис. 6.2,б).
Амплитудно-частотный спектр АИМ сигнала показан на рис. 6.2. Обратим внимание, что спектр содержит постоянную составляющую, составляющую на частоте модулирующего сигнала FM и составляющие на частотах Fi , i =1,2,... ,
при этом около каждой составляющей на частотах Fi , i =1,2,... , находятся боко-
вые частоты, отстоящие на частоту модулирующего сигнала Fi ± FM .
Наличие в спектре составляющей с частотой модулирующего сигнала FM
позволяет выделять ее с помощью ФНЧ. Если последовательность видеоимпульсов модулируется не простым гармоническим колебанием, а сигналом тональной частоты (речевой сигнал) с полосой Fmin − Fmax , то в спектре АИМ сигнала вместо частот FM будут присутствовать спектральные составляющие в полосе (рис. 6.3). Из-за сравнительно низкой помехоустойчивости АИМ обычно используется несамостоятельно, а в качестве промежуточной процедуры при формировании сигналов.
285

Амплитудно-частотный спектр ОДИМ сигнала показан на рис. 6.2,г. Состав |
||||||||
AM (F ) |
|
спектра |
|
аналогичен |
||||
|
F |
рассмотренному |
|
слу- |
||||
|
чаю АИМ, но имеет |
|||||||
AИ (F ) |
|
более |
сложную |
|
струк- |
|||
|
|
туру. |
Однако значения |
|||||
|
|
амплитуд |
высших |
|||||
|
F |
спектральных |
состав- |
|||||
AАИМ (F ) |
|
ляющих |
быстро |
убы- |
||||
|
вают и |
при демодуля- |
||||||
|
|
|||||||
|
|
ции также можно ис- |
||||||
|
F |
пользовать |
ФНЧ. При |
|||||
AОДИМ (F ) |
|
этом |
возможно |
огра- |
||||
|
ничение импульсов по |
|||||||
|
|
|||||||
|
|
амплитуде; |
это |
|
делает |
|||
|
F |
систему более помехо- |
||||||
|
устойчивой. |
|
|
|
||||
AФИМ (F ) |
|
|
|
|
Амплитудно- |
|||
|
|
частотный |
|
спектр |
||||
|
|
ФИМ сигнала показан |
||||||
|
F |
на рис. 6.2,д. По своей |
||||||
|
|
структуре он близок к |
||||||
спектру ДИМ, однако спектральная составляющая на частоте модулирующего |
||||||||
сигнала FM меньше, чем при ДИМ и АИМ в 50 и |
A |
|
(F ) |
|
|
|
|
|
|
АИМ |
|
|
|
|
|
|
|
более раз. Это объясняется тем, что, информация |
|
|
|
|
|
|
|
|
заложена в положении импульсов, а их сдвиги |
|
|
|
|
|
Fi |
|
|
при модуляции невелики. Следовательно среднее |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
значение частоты модулирующего сигнала приня- |
|
|
|
|
|
|
|
|
той ФИМ последовательности также мало. В этом |
|
|
|
|
|
|
|
|
случае применять ФНЧ нецелесообразно. Для де- |
|
|
|
|
|
|
|
|
286
модуляции ФИМ сигналы предварительно преобразуют в АИМ или ДИМ, и после этого применяют стандартные ФНЧ.
6.2. Помехоустойчивость непрерывных каналов связи с импульсной модуляцией
6.2.1. Помехоустойчивость систем передачи с импульсными методами модуляции
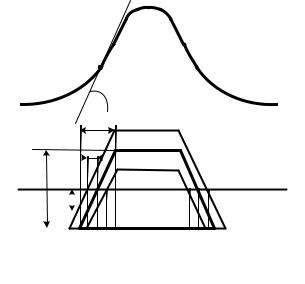
В реальных системах форму канальных импульсов стремятся сделать близкой к колоколообразной (рис. 6.4,а). У таких импульсов энергия сосредоточена в более узкой полосе частот, чем у прямоугольных.
Важным параметром импульсов |
|
|
|
|
|
|
|
|
|||||||||
является |
крутизна |
фронта |
(см. |
рис. |
|
|
|
|
|
|
|
s(t ) |
|||||
|
|
ds(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
6.4,а) SФ = |
|
= tgϕ , |
которая |
при |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
ϕ |
|||||||||
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
||
максимальном |
значении |
улучшает |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
τФ |
||||||||||||
выигрыш |
системы |
модуляции. |
На |
|
|
|
|
|
|||||||||
∆tш |
|
|
|
|
|
||||||||||||
огибающей |
импульса |
можно найти |
|
|
|
|
|||||||||||
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||
такую точку |
d |
(точку касания каса- |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
||||||||||
тельной и огибающей) в которой кру- |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
||||||||||
тизна фронта максимальна ( SФ = max ).
Для удобства анализа колоколообразную форму импульса заменим тра-
пецеидальной с амплитудой U0 и длительностью фронта |
τФ (рис. 6.4,б – |
||
сплошная линия). Крутизна фронта такого импульса SΦ = |
U0 |
. Заштрихованная |
|
τΦ |
|||
|
|
||
область условно представляет собой множество состояний информационного импульса, обусловленное воздействием помехи n(t) на входе устройства вре-
менного разделения и демодуляции. В результате помехи возникает паразитная модуляция канального импульса по амплитуде, длительности и фазе, что вызывает неодинаковый характер искажений демодулированного сигнала при АИМ, ДИМ (ШИМ), ФИМ.
287

Помехоустойчивость систем связи оценивается через выигрыш, который
можно представить в виде выражения: |
|
||||||
|
g = |
hвых |
, |
|
(6.2) |
||
|
|
||||||
|
|
|
hвх |
|
|||
где hвх – отношение сигнал/шум (ОСШ) на входе приемника, а hвых |
– ОСШ на |
||||||
выходе канала тональной частоты. |
|
||||||
Определим вначале выигрыш g для систем связи с АИМ. |
|
||||||
Отношение сигнал/шум на входе приемника определяется выражением: |
|||||||
hвх = |
U0 |
. |
|
||||
|
|
|
|||||
|
Uш вх |
|
|||||
Отношение сигнал/шум на выходе канала тональной частоты: |
|
||||||
hвых = |
Um |
= hвхmАМ , |
(6.3) |
||||
|
|||||||
Uшвых |
|
||||||
т.к. максимальное значение полезного сигнала на выходе демодулирующего ФНЧ:
|
|
|
|
|
|
Um =U0 mАМεKФНЧ , |
|
|
где mАМ = |
Umax −Umin |
– индекс амплитудной модуляции; ε = |
τ0 |
– коэффициент |
||||
|
T |
|||||||
U |
max |
+U |
min |
|
|
|||
|
|
|
|
|
i |
|
||
заполнения; KФНЧ |
– коэффициент передачи ФНЧ. Обозначим εKФНЧ =ν , где ν – |
|||||||
коэффициент пропорциональности, тогда Um =U0νmАМ .
Эффективное значение напряжения помехи на выходе индивидуального канала:
Uшвых =ν Uш вх ,
тогда:
hвых = U0νmАМ = U0 mАМ = hвхmАМ , |
|
νUш вх |
Uш вх |
откуда величина выигрыша для АИМ:
g АИМ = mАМ .
Таким образом, при АИМ отношение сигнал/шум на выходе демодулятора пропорционально глубине амплитудной модуляции. Максимальная помехоустой-
288
чивость достигается при (mАМ =1), однако в реальных системах связи всегда mАМ <1. Поэтому отношение сигнал/шум на выходе демодулятора АИМ всегда ниже, чем на входе.
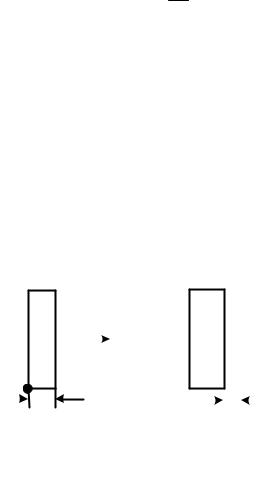
Оценим теперь помехоустойчивость систем связи с ФИМ (ДИМ). В этом случае сигнал на выходе демодулятора пропорционален девиации длительности ∆τm (ДИМ) и положения ∆tm (ФИМ) канальных импульсов, соответственно
(рис. 6.1,г,д).
При ФИМ, как и при ДИМ, можно исключить значительную часть искажений, а также аддитивных шумов, путем двухстороннего ограничения импульсов по амплитуде и их последующего восстановления по длительности.
Предположим, что ограничитель обладает порогом ограничения U20 (рис. 6.4,б),
а время переходных процессов пренебрежительно мало. Тогда на выходе ограничителя будут формироваться модулированные по соответствующему параметру импульсы.
Отношение сигнал/шум на входе демодулятора, можно оценить на основании подобия треугольников (рис. 6.4,б) через отношение:
hвхФИМ( ДИМ) = |
U0 |
= |
τФ |
. |
|
|
|
|
|
|
|
(6.4) |
|
|
|||||
|
|
|
|||||||||||||||||
Uш вх |
∆tш |
|
|
|
|
|
|
|
|||||||||||
Отношение сигнал/шум на выходе канала тональной частоты будет опре- |
|||||||||||||||||||
деляться выражением (6.3). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Максимальное значение полезного |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
сигнала на выходе демодулятора про- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
порционально девиации канальных им- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
пульсов ∆tm при ФИМ Um =ν ∆tm и ∆τm |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
при ДИМ Um =ν ∆τm (рис. 6.5): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Эффективное напряжение шума на выходе демодулятора: |
|
|
|
|
|
|
|
||||||||||||
Uшвых =ν ∆tш , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
тогда: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
289

hвыхФИМ = |
Um |
= |
|
ν∆tm |
= |
∆tm , |
|
Uшвых |
ν∆tш |
||||||
|
|
|
∆tш |
||||
hвыхДИМ = ∆τm .
∆tш
Подставляя (6.4) и (6.5) в (6.2), получим выигрыш при ФИМ:
gФИМ = ∆τtm .
Φ
(6.5)
(6.6)
Аналогично подставляя (6.4) и (6.6) в (6.2), получим выигрыш при ДИМ:
g ДИМ = ∆ττm .
Φ
Очевидно, выигрыш при ФИМ (ДИМ) прямо пропорционален девиации положения (длительности) канальных импульсов ∆tm ( ∆τm ) и обратно пропор-
ционален длительности фронта. Таким образом, порог ограничения реальных ФИМ (ДИМ) видеоимпульсов необходимо выбирать на таком уровне, при котором крутизна фронта канальных импульсов максимальна (например, в точке d на рис. 6.4,а)
Так как на практике всегда выполняются неравенства τΦ < ∆tm при ФИМ и
τΦ < ∆τm при ДИМ, то >1, т.е. отношение сигнал/шум на выходе демо-
дуляторов ФИМ (ДИМ) выше, чем на их входах.
Сравним между собой системы с ДИМ и ФИМ. Для получения требуемой девиации среднюю длительность канальных импульсов при ДИМ приходиться выбирать большей, чем при ФИМ. Это приводит к тому что PсрШИМ > PсрФИМ . Сле-
довательно в системах с ФИМ при сохранении средней мощности передатчика имеется возможность увеличить амплитуды канальных радиоимпульсов и тем самым повысить ОСШ на входе приемника. Кроме того, в системах с ДИМ для безискаженной передачи самых коротких импульсов приходиться выбирать полосу пропускания приемопередающих трактов более широкой чем это необходимо для импульсов средней длительности.
В то же время в системах с ФИМ длительность всех канальных импульсов одинакова и неизменна, что позволяет лучше согласовывать полосу про-
290