

Корольов / Теория связи
.pdfрывных сообщений являются устранение избыточности, статистическое уплотнение и применение цифровых видов модуляции.
Аналоговые системы ОМ, AM и узкополосная ЧМ обеспечивают высокую частотную эффективность при сравнительно низкой энергетической эффективности. Применение этих систем целесообразно в каналах с хорошей энергетикой (при больших значениях ρвх ) или в тех случаях, когда требуемое значение мало. Цифровые системы обеспечивают высокую β -
эффективность при достаточно хорошей γ -эффективности. В каналах с ограни-
ченной энергетикой (при малых значениях ρвх ) преимущества цифровых систем особенно заметны. При высоком качестве передачи, когда требуемые значения ρвых велики, широкополосная ЧМ и цифровые системы обеспечивают примерно одинаковую эффективность.
В многоканальных системах эффективность связи снижается за счет несовершенства системы разделения сигналов.
Расчеты показывают, что наиболее эффективным является метод временного разделения каналов; менее эффективен метод частотного разделения. При временном разделении пропускная способность не зависит от числа каналов, т.к. в каждый момент времени передается только один сигнал. При ЧРК пропускная способность канала с ограниченной средней мощностью сигнала также не зависит от числа каналов. При разделении по форме между n парциальными каналами делится только мощность, полоса частот и время передачи используются одновременно всеми сигналами. В этом случае информационная эффективность уменьшается с увеличением n, причем амплитудное ограничение сигнала слабо влияет на эту зависимость.
Показатели частотной, энергетической и информационной эффективности для систем с множественным доступом определяются на основании суммарной скорости передачи СЭС, зависящей от методов формирования и обработки информационных сигналов в парциальных каналах и методов доступа.
371

9.2. Выбор сигналов и помехоустойчивых кодов
Эффективность систем передачи дискретных сообщений можно существенно повысить путем применения многопозиционных сигналов и корректирующих кодов.
9.2.1. Многопозиционные сигналы
Ансамбль сигналов si (t), где i 0,m −1, на отрезке [0,T ] можно представить в виде [5, 21, 32]:
n |
|
si (t)= ∑Cijϕj (t). |
(9.14) |
j =0
Здесь n-число отсчетов на интервале Т , а {ϕj (t)} – система базисных ортонор-
мированных функций:
T 2 |
|
|
|
∫ϕi (t)ϕj (t)= 1, приi = j . |
(9.15) |
||
−T |
2 |
0, приi ≠ j |
|
|
|
|
|
Геометрически каждому сигналу ансамбля si (t) соответствует точка (или вектор) в n -мерном пространстве с координатами (Ci1,Ci2 ,...,Cin ). В соответствии с формулой (1.8), энергия сигнала
E = Т∫si2 (t)dt , |
(9.16) |
||||
|
|
0 |
|
|
|
а расстояние (1.42) между сигналами |
|
||||
d (si , sj )= [si (t)− sj (t)]2 |
= Ei + Ej − 2Bij Eij , |
(9.17) |
|||
где |
|
|
|
|
|
1 |
T |
|
(t)s j (t)dt , |
|
|
Bij = |
|
∫0 |
si |
(9.18) |
|
Eij |
|||||
коэффициент взаимной корреляции рассматриваемых сигналов.
На рис. 9.2 приведены βγ -диаграммы для некоторых ансамблей многопо-
зиционных сигналов. Центральное место на рис. 9.2 занимают кривые для систем с сигналами ФМн-4, которые относятся к классу многопозиционных при m = 4 . В цифровых сетях система ФМн-4 является наиболее распространенной и принята в качестве стандарта, поэтому при сравнительной оценке эффективно-
372
сти систем она принята за эталон. Если начало координат перенести в точку, соответствующую ФМн-4, то в новой системе координат по вертикальной оси будет отсчитываться энергетический выигрыш ∆β рассматриваемых систем по сравнению с ФМн-4, а по горизонтальной оси – выигрыш ∆γ по удельной ско-
рости. В этой системе координат все возможные системы связи можно условно разделить на четыре группы, соответствующие четырем квадрантам на плоскости.
Малоэффективные системы (III квадрант), имеющие относительно ФМн- 4 проигрыш по β и γ , например, АМн-2, ЧМн-2. Системы с высокой энергети-
ческой эффективностью (II квадрант), обеспечивающие выигрыш по β и про-
игрыш по γ (системы с корректирующими кодами). Системы с высокой час-
тотной эффективностью (IV квадрант), обеспечивающие выигрыш по γ и про-
игрыш по β (системы с многопозиционными ФМн и АФМ сигналами). Высо-
коэффективные системы (I квадрант), позволяющие получить одновременно выигрыш по обоим показателям β и γ на основе применения сложных сиг-
нально-кодовых конструкций).
Можно выделить также два класса многопозиционных сигналов. К первому отнесем так называемые «плотные» сигналы, когда с ростом объема ан-
самбля m при фиксированной размер- |
|
|
|
|
|
|
|
|
|
ности n расстояние между сигнальны- |
|
|
|
2 |
E |
|
|
||
ми точками уменьшается, а удельная |
|
|
|
|
|
||||
s |
|
(t) |
|
|
|
R |
|
s (t) |
|
скорость γ возрастает при соответст- |
2 |
|
|
|
|
||||
|
|
|
|
|
|
|
|
1 |
|
вующем снижении энергетической эф- |
|
|
|
|
|
|
E |
|
|
фективности β . Примерами таких сиг- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
налов служат многопозиционные ФМн |
Рис. 9.3. Двухпозиционный сигнал |
||||||||
и АФМ. |
|
|
|
|
(ФМн-2) |
|
|
||
Примером сигналов, у которых сигнальные векторы располагаются на прямой, являются двоичные противопо-
ложные сигналы ФМн-2 (рис. 9.3). Им соответствует два симметрично распо-
373
ложенных относительно начала координат вектора длиной  E . Расстояние ме-
E . Расстояние ме-
жду сигналами d12 = 2 E , а коэффициент корреляции R12 = −1.
E , а коэффициент корреляции R12 = −1.
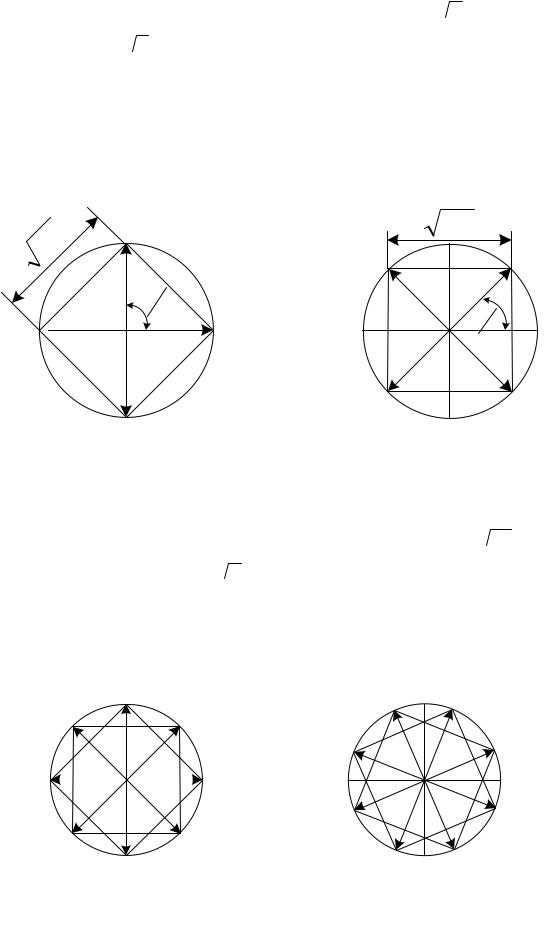
К этому же классу относятся и широко используемые сигналы с фазовой манипуляцией и числом позиций m = 4 (рис. 9.4). Сигналы ФМн-4 имеют одинаковые энергии, а сигнальные точки располагаются на одинаковом расстоянии от начала координат. На амплитудно-фазовой плоскости они образуют квад-
E 2
s3 (t) 
s2 |
(t) |
s2 (t) |
2E |
|
|
s1 (t) |
|
|
π 2 |
s1 (t) |
π4 |
|
|
||
|
|
|
|
s4 (t) |
s3 (t) |
s4 (t) |
|
|
|
||
ратную сеть. Сигналы этого ансамбля отличаются только начальными фазами.
Расстояние между ближайшими сигнальными точками равно  2E , а между противоположными сигналами 2
2E , а между противоположными сигналами 2 E .
E .
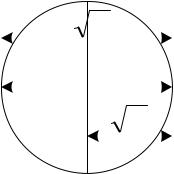
Многопозиционные сигналы с ФМн-8 образуют круговую сеть с равномер-
ным распределением точек по окружности (рис. 9.5). |
|
|
||||||
s4 (t) |
s3 |
(t) |
s2 (t) |
s3 |
(t) |
s2 (t) |
||
|
|
|||||||
|
|
s4 (t) |
|
s1(t) |
||||
s5 (t) |
|
|
|
|
s1(t) |
|
||
|
|
|
|
s5 (t) |
|
s8 (t) |
||
|
|
|
|
|
||||
s6 (t) |
|
|
s8 (t) |
|
||||
|
|
s6 (t) |
s7 (t) |
|||||
|
|
s7 (t) |
|
|
||||
|
|
|
|
|
|
|
||
374
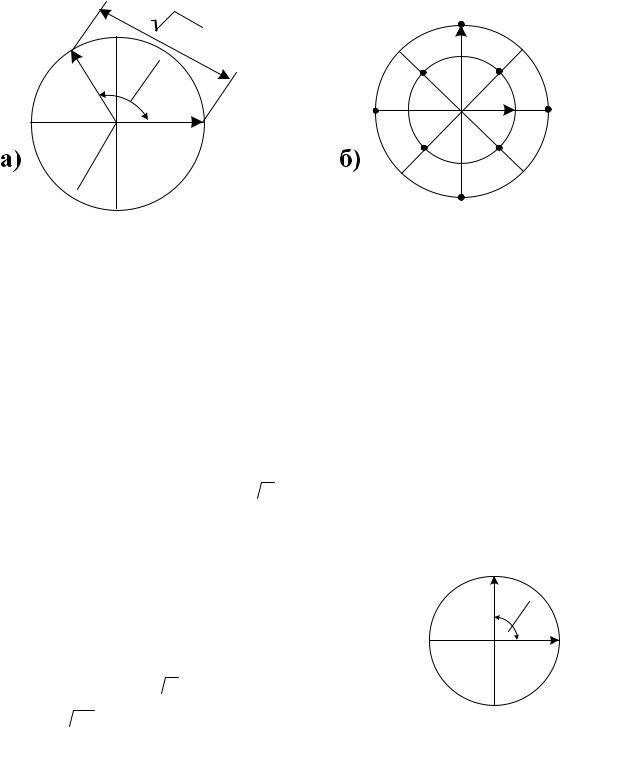
Для сигналов АФМ–4 три сигнала равномерно распределены по окружности, а четвертый расположен в центре окружности (рис. 9.6,а).
На рис. 9.6,б показано также расположение сигнальных точек в восьми позиционной системе с амплитудно-фазовой модуляцией (АФМ-8).
s2 |
(t) |
|
3 |
|
|
s2 (t) |
|
|
|
|
|
|
|||
|
|
|
E |
|
|
|
|
|
|
2π 3 |
|
s3 |
(t) |
R |
s1(t) |
|
|
s4 (t) |
s1(t) |
r |
|||
|
|
|
|
|
|
||
|
|
|
|
|
|
|
s3 (t) 
Ко второму классу отнесем ортогональные, биортогональные и симплексные сигналы. Это примеры «разнесенных» сигналов, когда с увеличением m увеличивается расстояние между сигнальными точками и соответственно увеличивается энергетическая эффективность за счет снижения частотной эффективности.
Если сигнальные точки выбрать на линиях, совпадающих с ортогональ-
ными областями на расстояниях  E от начала координат, то получим систему
E от начала координат, то получим систему
ортогональных сигналов. Число сигналов в таком ансамбле m = n . |
|
|
|
Двоичные ортогональные сигналы являются |
s2 (t) |
|
|
примером сигналов, у которых сигнальные точки |
π 2 |
|
|
располагаются в плоскости (рис. 9.7). |
s1 |
(t) |
|
Им соответствуют два ортогональных вектора на плоскости длиной E . Расстояние между сигна-
E . Расстояние между сигна-
лами d12 =  2E , а коэффициент корреляции R12 = 0 .
2E , а коэффициент корреляции R12 = 0 .
Если в качестве сигналов взять отрезки гармо-
375
нических колебаний разных частот ω1,ω2 ,...,ωm , удовлетворяющих условию ор- |
|
тогональности, то получим сигналы многочастотной модуляции (МЧМ). Орто- |
|
гональные сигналы образуют эквидистантную систему; расстояния между лю- |
|
быми двумя сигнальными точками одинаковы: dij = 2E . Перспективным вари- |
|
антом ЧМн сигналов являются частотно-манипулированные сигналы с непре- |
|
рывной фазой. |
|
Биортогональные сигналы образуются путем добавления к каждому орто- |
|
гональному сигналу противоположного. При этом общее число сигналов уд- |
|
ваивается: m = 2n . |
|
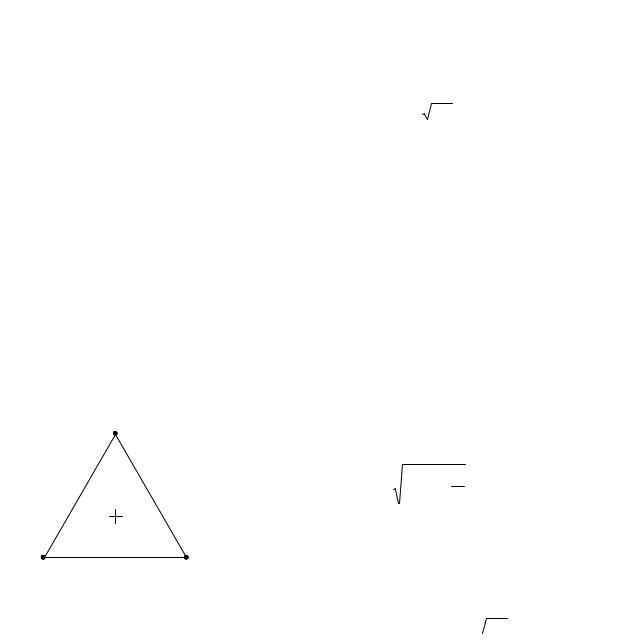
Симплексные сигналы отстоят друг от друга на одинаковом расстоянии. |
|
В n -мерном пространстве они образуют правильный симплекс с числом вер- |
|
шин m = n +1. В двумерном пространстве сигнальные точки лежат в вершинах |
|
s2 (t) |
равностороннего треугольника (рис. 9.8). Рас- |
стояние между сигнальными точками симплекс- |
|
|
ного ансамбля d = 2(n +1)E . При n =1 симплекс- |
|
n |
ные сигналы совпадают с противоположными. Для ансамблей с большим объемом ( n >>1) симплексные сигналы по своим свойствам и в част-
ности по помехоустойчивости близки к ортогональным d ≈  2E .
2E .
Построение ансамблей многопозиционных сигналов можно осуществить и на основе двоичных последовательностей: для этого можно использовать элементарную матрицу Уолша–Адамара ( A0 ). Формирование матриц высшего по-
рядка подчинено следующему правилу: матрица младшего порядка трижды повторяется в позитивной и один раз в негативной форме. При достижении размерности матрицы 4×4 , она уже представляет собой ансамбль многопозиционных ортогональных сигналов с m = 4 [5, 21]:
376
|
|
|
|
|
|
|
|
+1 |
+1 |
+1 |
+1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
A0 = +1, |
A1 = |
|
+1 |
+1 |
|
, |
A2 = |
+1 |
−1 |
+1 |
−1 |
|
. |
(9.19) |
|
|
|||||||||||||
|
|
|
+1 |
−1 |
|
|
|
+1 |
+1 |
−1 |
−1 |
|
|
|
|
|
|
|
|
|
|
|
+1 |
−1 |
−1 |
+1 |
|
|
|
Каждая строка этой матрицы (последовательность двоичных символов) образует один сигнал; нетрудно убедиться в том, что строки (столбцы) этой
матрицы взаимно ортогональны. Дополняя матрицу A2 |
инверсиями строк, мож- |
||||||
но получить матрицу B , представляющую ансамбль |
m =8 биортогональных |
||||||
сигналов: |
|
|
|
|
|
|
|
|
+1 |
+1 |
+1 |
+1 |
|
|
|
|
|
|
|||||
|
+1 |
−1 |
+1 |
−1 |
|
|
|
|
+1 |
+1 |
−1 |
−1 |
|
|
|
B = |
+1 |
−1 |
−1 |
+1 |
|
. |
(9.20) |
|
−1 |
−1 |
−1 |
−1 |
|
|
|
|
−1 |
+1 |
−1 |
+1 |
|
|
|
|
−1 |
−1 |
+1 |
+1 |
|
|
|
|
−1 |
+1 |
+1 |
−1 |
|
|
|
Ансамбли с большим числом сигналов строятся аналогично. В асинхрон- но-адресных системах широко используются ансамбли «почти ортогональных» сигналов, которые также формируются на основе двоичных последовательностей. Это известные рекуррентные псевдослучайные D и M - последовательности.
Приведенные на рис. 9.2 кривые позволяют количественно оценить обменный выигрыш (проигрыш) различных систем. Так, применение многопозиционных АФМ сигналов с m =16 позволяет получить частотный выигрыш в 2 раза ( ∆γ = 3 дБ) в обмен на снижение энергетического выигрыша ∆β более чем на 4 дБ. Получить энергетический выигрыш в обмен на снижение удельной скорости можно с помощью ортогональных и биортогональных сигналов.
9.2.2. Корректирующие коды
Наряду с многопозиционными сигналами для повышения эффективности СЭС широко используются помехоустойчивые коды. Применение корректирующих кодов позволяет повысить верность передачи сообщений или при за-
377
данной верности повысить энергетическую эффективность системы. Это особенно важно для систем с малой энергетикой, например, систем спутниковой связи.
На практике используются как блочные, так и непрерывные коды. На рис. 9.2 приведены кривые эффективности для циклического кода Боуза- Чоудхури-Хоквингема (БЧХ) и для сверточного кода (СК) с декодированием по алгоритму Витерби.
Применение циклического кода позволяет получить энергетический выигрыш ∆β = 2...4 дБ, а сверточного кода ∆β = 4...6 дБ в обмен на снижение час-
тотной эффективности примерно в 2 раза (3 дБ).
Энергетический выигрыш ∆β от применения помехоустойчивого кодиро-
вания тем больше, чем выше требуемая верность передачи. Для непрерывного канала с белым гауссовским шумом при требуемой вероятности ошибки 10−5 предельный энергетический выигрыш кодирования по сравнению с ФМн-2 без кодирования при оптимальном когерентном приеме составляет примерно 10 дБ.
Расчетные кривые на рис. 9.2 показывают, что применение циклического кода в канале с ФМн или сверточного кода в канале с АФМ позволяет повысить одновременно энергетическую, так и частотную эффективности. Построение таких высокоэффективных систем на основе сигнально-кодовых конструкций ведет к неизбежному увеличению сложности системы. Не пропускная способность, а сложность является ограничивающим фактором при построении высокоэффективных систем. Задача состоит в том, чтобы построить систему, удовлетворяющую высоким показателям эффективности, при допустимой сложности.
При современной элементной базе затраты на реализацию кодирующих и декодирующих устройств значительно сократились. В то же время стоимость энергетики канала практически не изменилась. Таким образом, «цена» выигрыша ∆β за счет кодирования может быть существенно меньше цены того же выигрыша, полученного за счет увеличения энергетики канала (мощности сигнала или размеров антенн).
378
Отметим, что выбор способов кодирования и модуляции зависит от характеристик канала. Улучшение этих характеристик, например, путем адаптации к помехам и оценивания искажений сигнала и их последующей компенсации, снижает потери в канале и создает лучшие условия для применения корректирующих кодов.
9.3. Оптимизация систем связи
Повышение таких важнейших показателей систем электрической связи, как скорость и верность передачи, связано со значительными частотными и энергетическими затратами. Сравнение между собой различных СЭС осуществляется по степени использования ими основных ресурсов канала связи (пропускной способности, мощности, занимаемой полосы частот), выражаемой через показатели информационной, энергетической и частотной эффективности. Создание СЭС, в которых достигаются близкие к предельным показатели эффективности, требует совместного согласования кодека и модема с учетом статистических свойств непрерывного канала.
9.3.1. Согласование методов модуляции и кодирования
Эффективный путь повышения удельной скорости передачи информации заключается в увеличении числа используемых сигналов m на интервале T . Однако увеличение m приводит к уменьшению расстояния между ближайшими сигналами ансамбля и снижению энергетической эффективности.
При высоких требованиях к верности передачи целесообразным становится применение помехоустойчивых кодов, которые позволяют повысить энергетическую эффективность за счет снижения частотной. Помехоустойчивое кодирование позволяет снизить необходимую величину мощности сигнала поскольку расстояние между кодовыми комбинациями увеличивается. Одновременное требование большой скорости и верности передачи в условиях ограниченного частотного и энергетического ресурса может быть выполнено при использовании многопозиционных сигналов и помехоустойчивых кодов.
379
При многопозиционной модуляции, когда по каналам связи передается блок из n кодовых символов, важно также правильно выбрать манипуляционный код, определяющий правило сопоставления с каждым передаваемым сигналом определенного блока кодовых символов. Общий принцип заключается в том, что большему расстоянию по Хэммингу между кодовыми блоками должно соответствовать большее расстояние по Евклиду между отображающими их сигналами.
Создание СЭС, в которых достигаются близкие к предельным показатели эффективности, требует совместного согласования кодека и модема с учетом статистических свойств непрерывного канала. Это означает, что кодирование и модуляцию необходимо рассматривать как единый процесс формирования сигнала, а демодуляцию и декодирование – как процесс оптимального приема сиг- нально-кодового блока в целом.
Согласование модуляции и кодирования сводится к поиску такого заполнения сигнального пространства, при котором обеспечивается высокая удельная скорость (сигналы расположены достаточно плотно) и одновременно высокая помехоустойчивость (сигналы достаточно далеко друг от друга).
Комбинирование различных ансамблей m -ичных сигналов, помехоустойчивых и манипуляционных кодов порождает множество конструкций. Однако только согласованные варианты обеспечивают повышение частотноэнергетической эффективности СЭС. Эти варианты называют сигнальнокодовыми конструкциями (СКК).
Рассмотрим обобщенную схему передачи дискретных сообщений, приведенную на рис.9.9.
380