

§2.2 Способы записи микропрограмм
Для записи микропрограмм в компактной форме используются граф-схемы алгоритмов (ГСА), которые представляют собой ориентированный связанный граф и имеют пять типов вершин (рис. 2.2). Начальная вершина (рис. 2.2, а) не имеет входов, имеет только один выход и определяет начало микропрограммы. Конечная вершина (рис. 2.2, б) имеет один вход и определяет конец микропрограммы. Операторная вершина (рис. 2.2, б) имеет один выход и один вход; в нее вписывают МО, выполняемые в течение одного машинного такта. Условная вершина (рис. 2.2, г) имеет один вход и два выхода; с ее помощью отождествляется выполнение логического условия (1 или 0). Ждущая вершина (рис. 2.2, д) имеет один вход и два выхода; с ее помощью можно описывать ожидание в работе дискретных устройств.
При составлении ГСА операций необходимо руководствоваться следующими правилами:
1) Гса должна содержать одну начальную, одну конечную вершину и конечное множество операторных и условных вершин;
2) Каждый выход гса соединяется только с одним входом;
3) Входы и выходы различных вершин соединяются дугами, направленными от выхода к входу;
4) Для любой вершины гса существует, по крайней мере, один путь из этой вершины к конечной вершине, проходящей через операторные и условные вершины в направлении соединяющих их дуг;
5) в каждой операторной вершине записываются МО, составляющие МК yi, где t==\,2,...,n, являющуюся подмножеством множества МО
у =={y1, ••• .yN}, yty;
6) в каждой условной вершине записывается один из элементов множества логических условий х = (x1, x2, ... , хl);
7) начальной вершине ставится в соответствие оператор у0 , а конечной—уn+1 или yk.
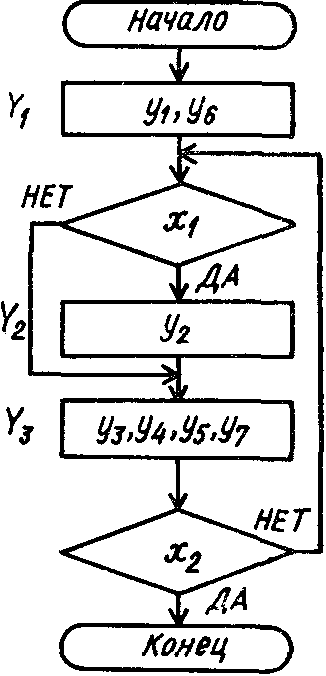
Рис. 2.3. Пример микропрограммы, записанной на языке ГСА
На рис. 2.3 показан пример микропрограммы, записанной на языке ГСА. Оператор Y 1 содержит МО y1, y6 , Y2 —y2, Y3 — y3y4y5y7.
На сложность выполняемого устройства влияет количество операторных и ждущих вершин в ГСА. Для минимизации числа операторных вершин разработаны специальные методы.
§2.3 Микропрограммный принцип управления операциями
Микропрограммирование—это метод проектирования и реализации функций управления системы обработки данных, опирающийся на последовательность управляющих сигналов, которые служат для интерпретации фиксированных или динамически изменяемых операций обработки данных. Эти управляющие сигналы, представленные в виде слов и хранящиеся в фиксированной или динамически изменяемой памяти УУ, отражают состояния сигналов, которые управляют потоком информации между исполнительными функциональными узлами и задают упорядоченный переход от одних таких состояний к другим [29].
Отличие МПА с «жесткой» логикой от МПА с программируемой логикой состоит в том, что в МПА с «жесткой» логикой закон функционирования определяется способом соединения логических элементов, в то время как в МПА с программируемой логикой он задается программой, хранимой в ячейках памяти, называемых управляющей памятью, либо памятью МК. Выполнение каждой операции расчленяется на последовательность элементарных действий, таких как сдвиг регистра, установка его в нуль.

Рис. 2.4. Формат МК
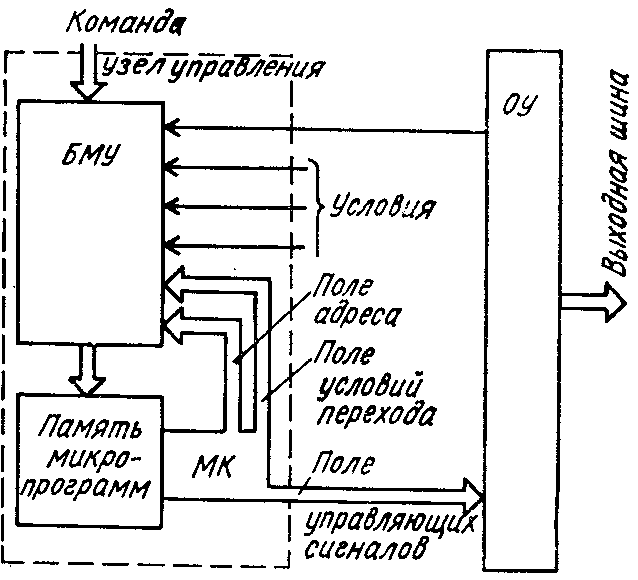
Рис. 2.5. Обобщенная структурная схема микропрограммируемого УУ
Запись в регистр числа, перенос из одного регистра в другой и т.д. Такие элементарные действия, выполняемые с приходом тактирующего импульса, называются микрооперациями (МО). На каждую МО составляется МК, в которой указывается, в какие из управляющих цепей должны поступать импульсы в данном такте. Совокупность МК называется микропрограммой. Микропрограммы составляются на каждую операцию, которую необходимо выполнить.
Выбирая в определенной последовательности содержимое ячеек памяти, т. е. МК, их подают на вход операционного устройства, где они выполняются. При таком принципе управления операциями в каждом такте определяется адрес в управляющей памяти, откуда должна считываться МК. В этом случае нет необходимости создавать сложные УУ. Программа, выполняемая таким устройством, помещается в ПЗУ либо в ПЛМ.
Микрокоманда, помещаемая в ПЗУ при микропрограммном принципе управления, имеет ряд полей (рис. 2.4).
Обобщенная структурная схема микропрограммного УУ показана на рис. 2.5.
По состоянию полей адреса и условных переходов в текущей МК, а также по значению условий, выдаваемых ОУ в процессе выполнения текущей МК, в блоке микропрограммного управления ЕМУ формируется адрес ячейки памяти микропрограммы, в которой хранится следующая МК. В следующем тактовом периоде МК считывается и поступает в ОУ, который выполняет данную МК, а ЕМУ формирует адрес очередной МК, и так происходит до тех пор, пока не будет выполнена вся микропрограмма. В памяти может храниться несколько микропрограмм для решения различных задач. В зависимости от содержания команды выполняется требуемая микропрограмма. Команда содержит адрес выполняемой МК той микропрограммы, которая будет выполняться, а последующая МК этой микропрограммы определяется автоматически. Такой способ микропрограммного управления называется управлением с естественной адресацией и нашел наиболее широкое распространение в микропроцессорной технике. Упрощенная структурная схема УУ при использовании естественной адресации изображена на рис. 2.6.
При естественной адресации используются МК двух типов: управляющие и операционные (рис. 2.7). Типы МК различаются по значению разряда Р : Р = О, если МК операционная, и Р = 1, если МК управляющая.
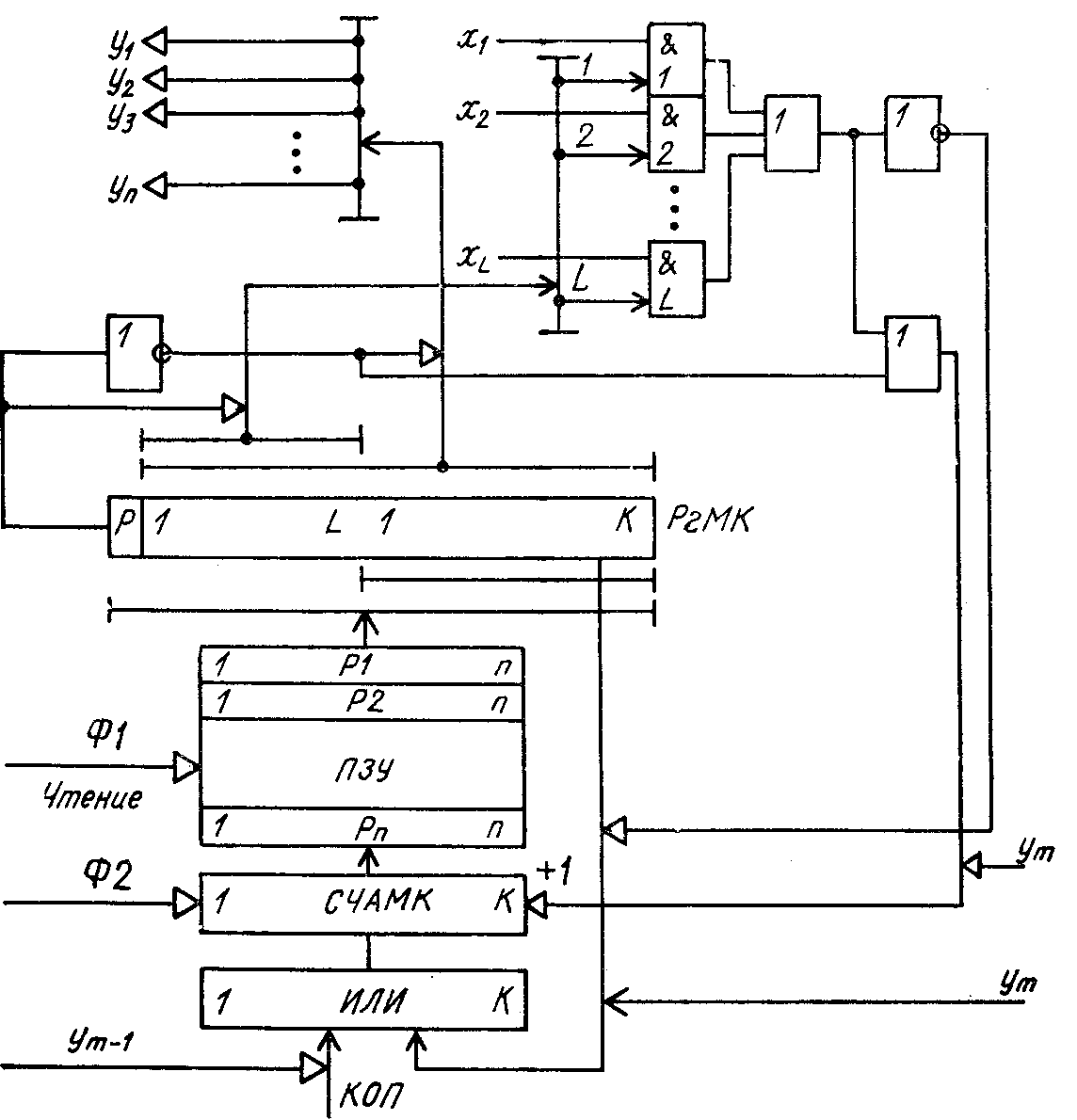
Рис. 2.6. Упрощенная структурная схема УУ с естественной адресацией
Определение адреса следующей МК производится с помощью счетчика адреса микрокоманды СЧАМК- Посредством операционной МК вырабатываются сигналы y1, у2 ..., yn и автомат переходит к следующему адресу.
Управляющая команда предназначена для изменения естественного порядка ее выполнения. С помощью этой МК реализуются условные и безусловные переходы в соответствии со значениями проверяемых условий xi.
Если в поле х есть единица, то проверяется значение соответствующей переменной xl: при xl == 1 адрес следующей МК соответствует А + 1, при xl = 0 следующий адрес формируется за счет содержания поля В, т. е. происходит безусловная передача управления МК с адресом В.

Рис. 2.7. Структура операционной (а) и управляющей (б) МК
Сигнал Ф2 предназначен для занесения информации в адресный регистр СЧАМК., Ф\ —для считывания МК из ПЗУ и занесения ее в регистр МК.
Синтез автоматов с программируемой логикой состоит из следующих этапов: