

§6.1.3. Структура устройства управления
Устройство управления микро-ЭВМ. обеспечивает выполнение последовательности микроопераций в соответствии с кодом текущей команды и организует выборку команд программы в соответствии с выполняемой программой. Использование микропрограммирования в реализации устройства управления позволяет создавать его на регулярных структурах, допускающих легко вносить изменения в формируемую последовательность управляющих сигналов.
Представленная на рис. 6.6 обобщенная схема устройства микропрограммного управления содержит: блок микропрограммной памяти, в котором хранятся микрокоманды; блок генерации адреса микрокоманды, формирующий адрес очередной микрокоманды, который в общем случае зависит от кода выполняемой микрокоманды, кодов признаков выполняемых в АЛБ операций, информации блоков синхронизации и прерывания процессора; блок синхронизации, предназначенный для приема управляющих сигналов и формирования последовательности синхросигналов для основных блоков микро-ЭВМ для обеспечения определенной последовательности их работы; дешифратор микрокоманд, формирующий управляющие сигналы, поступающие в исполнительные блоки микро-ЭВМ.
Наиболее распространены варианты реализации устройств управления с использованием в качестве микропрограммной памяти постоянного ЗУ (ПЗУ) или перепрограммируемого ЗУ (ППЗУ) и устройства управления на базе программируемой логической матрицы (ПЛМ).
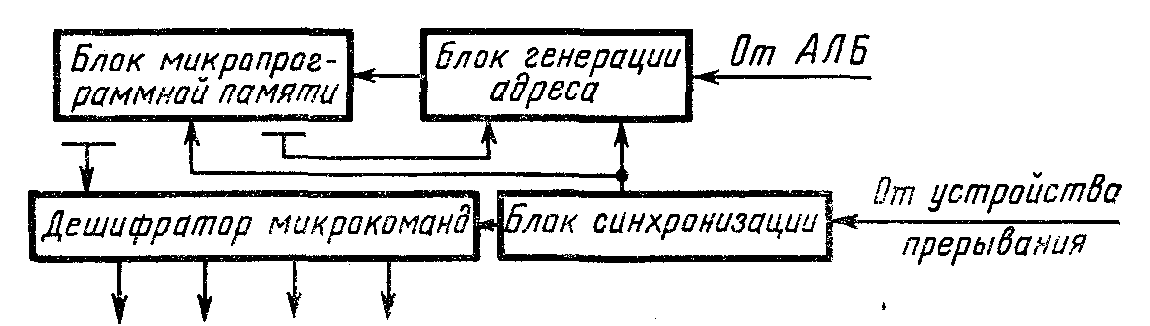
Рис. 6.6. Обобщенная схема устройства управления
В первом случае блок памяти микрокоманд выполняют на базе стандартных БИС памяти типа ПЗУ, ППЗУ. Остальные блоки устройства управления объединяют в отдельную БИС или исполняют в виде отдельных узлов на схемах средней интеграции. В устройстве управления на базе ПЛМ все блоки объединяют в одну БИС, представляющую собой фактически законченный цифровой автомат, закон функционирования которого определяется коммутацией внутренних магистралей матрицы.
Типовая структура микрокоманды. Типовой формат слова микрокоманд включает в себя зоны микроопераций, «следующего адреса» и служебных и управляющих разрядов.
Зона микрооперации содержит код выполняемой операции. В практике микропрограммирования существуют две основные стратегии кодирования зоны микроопераций: минимальное и максимальное кодирование [4]. При минимальном кодировании зона микроопераций разделяется на отдельные поля, каждое из которых имеет определенное число разрядов и через комбинационную декодирующую схему управляет конкретным операционным устройством. Содержимое различных полей не зависит друг от друга. В предельном случае стратегия минимального кодирования приводит к горизонтальному микропрограммированию, при котором каждый разряд микрокоманды управляет работой соответствующего блока или узла операционного устройства. При этом разрядность зоны микрооперации равна числу управляющих устройств.
При максимальном кодировании зона микроопераций содержит поле формата и поле микроопераций. Каждый формат предназначен для управления одним операционным блоком. Для каждого формата существует фиксированный набор микроопераций. Микрокоманды с максимальным кодированием имеют малую разрядность, но требуют довольно сложной дешифрации и не позволяют управлять несколькими операционными блоками.
Выбор стратегии кодирования зоны микрооперации связан со стремлением уменьшить формат микроопераций, упростить структуру дешифратора микроопераций и увеличить производительность процессора. Минимальное кодирование позволяет достигнуть большей производительности и распространено для управления операционных устройств широкого применения.
Для редко используемых операционных устройств целесообразно максимальное кодирование, при этом одно операционное поле управляет несколькими устройствами в зависимости от кода формата.
Зона «следующего адреса» содержит информацию, необходимую для формирования адреса следующей микрокоманды. Структура полей в этой зоне зависит от механизма формирования адреса микропрограммной памяти и будет рассмотрена более подробно при описании блока генерации адреса микрокоманды.
Зона служебных и управляющих разрядов обычно содержит информацию для управления узлами и блоками, являющимися специфичными для разных типов микропроцессоров. К такой информации относятся коды по управлению внешними устройствами памяти, коды, позволяющие маскировать входную информацию, коды, позволяющие организовать условную синхронизацию, и др.
Условная синхронизация микропроцессора необходима для изменения ритма его работы, например когда для вычислений требуется результат предыдущей операции, формируемый с заданной временной задержкой. Выполнение последующей операции в таком случае должно отставать от предыдущей на определенное число циклов работы микропрограммного устройства, которое может быть достигнуто использованием холостых операций. Однако запись программ с учетом пропуска фиксированного числа циклов достаточно сложна и требует строгого анализа, временных задержек всех блоков микро-ЭВМ. Более гибкое управление с учетом различия времени выполнения операций может быть реализовано с использованием зоны условной синхронизации микрокоманды. Код в зоне условной синхронизации обеспечивает блокировку синхронизирующих импульсов, формирующих переход к следующей микрокоманде. Блокировка прекращается при поступлении сигнала готовности от соответствующего узла процессора. Условная синхронизация обеспечивает асинхронность работы отдельных блоков микропроцессора по отношению к микропрограммному устройству, при сохранении управления под контролем синхросигналов.
Структура блока генерации адреса. Блок генерации адресов микрокоманд — один из основных блоков устройства микропрограммного управления — определяет логические возможности и структуру языка программирования. Структура этого блока задает механизм формирования в устройстве управления адреса следующей микрокоманды. Наиболее распространены в микропроцессорных устройствах управления способы формирования следующего адреса микрокоманд с использованием инкрементного счетчика, поля «следующего адреса» в составе формата микрокоманды и стековой памяти.
В микропроцессорных вычислительных системах устройства управления реализуются, как правило, на основе специальных БИС блока микропрограммного управления. Такие БИС представлены практически во всех развитых секционируемых МПК и используются для адресации памяти, содержащей представленную в микрооперациях рабочую программу или интерпретирующей фиксированную систему команд. Выбор типа БИС для устройства управления в значительной степени зависит от требований конкретного применения вычислительного устройства, поскольку устройство управления определяет возможные способы адресации и источники адресов, механизм модификации адресов при условных и безусловных переходах.
В алгоритмах, реализуемых на вычислительных устройствах с микропрограммным управлением, число типов переходов ограничено. В каждом конкретном случае это число может быть обосновано и соответственно блок генерации адресов микрокоманд должен обеспечить их выполнение. Наибольшее распространение в алгоритмах микропрограммного управления получили следующие типы переходов [8]: