

§24.3. Микропроцессорный комплект серии к587 §24.3.1. Арифметическое устройство к587ик2.
Устройство представляет собой четырехразрядный автономный модуль обработки цифровой информации с микропрограммным управлением [6]; предназначено для приема, оперативного хранения, обработки и выдачи цифровой и командной информации, а также для построения операционных блоков цифровых вычислительных средств различной разрядности, кратной четырем.
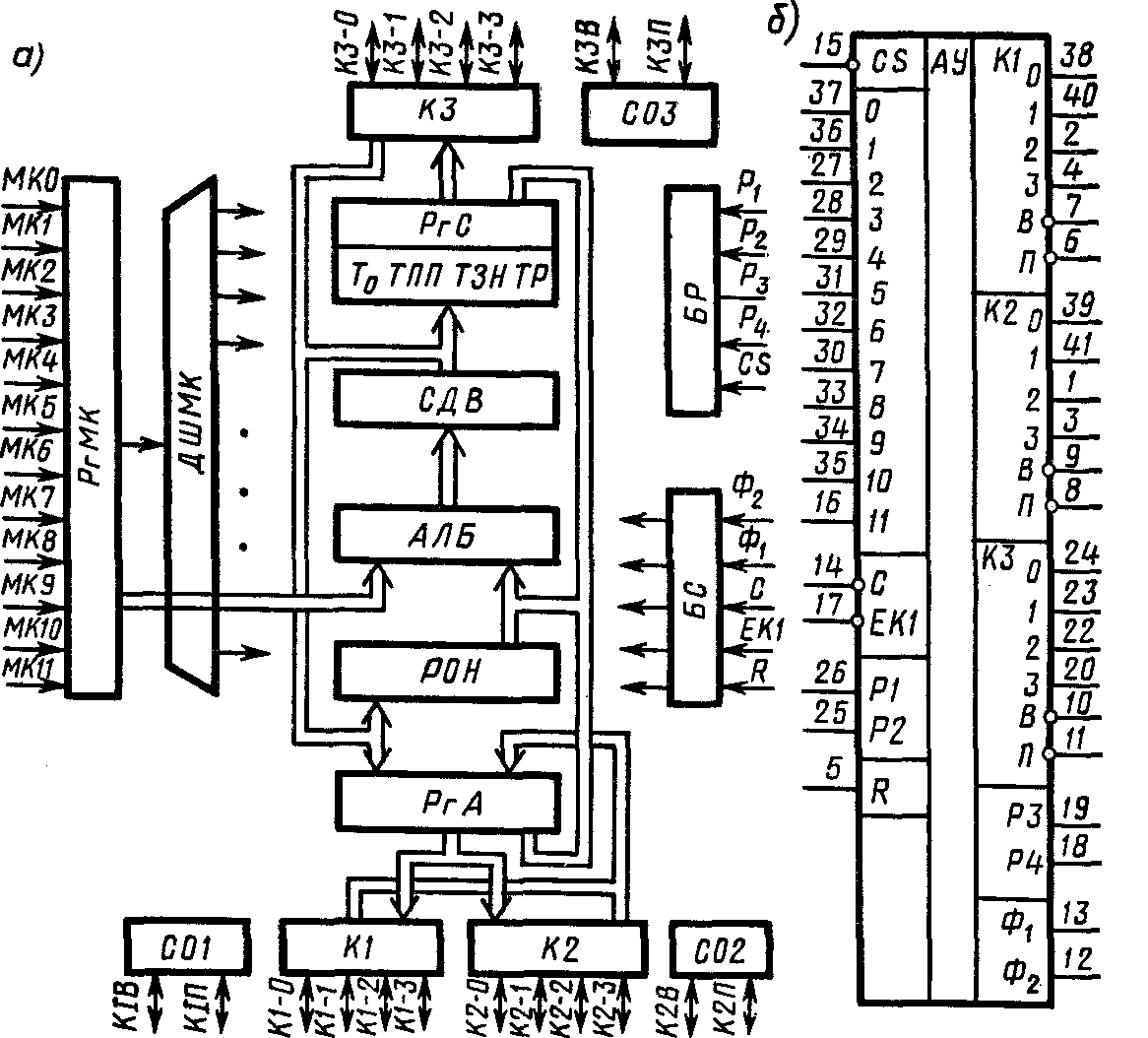
Рис. 24.2. Схема арифметического устройства К587ИК2 (а) и его условное обозначение (б)
Таблица 24.1 Распределение поля команды по разрядам
|
|
Распред |
деление поля кома |
нды по разрядам |
|
|
|
01234 |
567 |
8 9 10 |
11 |
|
РР |
0 0 КОП 1 |
pi |
Pi |
ВС |
|
А |
1 0 КОП 1 |
Pi |
КОП 2 |
ВС |
|
К |
0 1 КОП 1 |
Константа |
КОП 4 |
ВС |
|
0 |
1 1 КОП 1 |
|
КОП 3 |
ВС |
Структура устройства К587ИК2 содержит следующие функциональные блоки (рис. 24.2. а): параллельный арифметическо-логический блок АЛБ; блок регистров общего назначения РОН; блок сдвигателя СДВ; регистр состояния РгС; рабочий регистр РгА; регистр микрокоманд РгМК; три четырехразрядных канала KI, К2, К^З; схемы обмена С01, С02, СОЗ; дешифратор микрокоманд ДШ; блок синхронизации БС; блок расширения БР.
В зависимости от кодов в разрядах 0—1 регистра микрокоманд РгМК. 12-разрядную микрокоманду АУ разбивают на поля, образуя четыре формата микрокоманд (табл. 24.1).
Во всех форматах микрокоманд разряды РгМК (2—4) == КОП 1 указывают код операции АЛБ, а разряд РгМК (11)== ВС—на необходимость записи состояний в РгС и выдачи содержимого регистра состояний в канал КЗ.
Параллельный арифметическо-логический блок АЛБ предназначен для выполнения арифметических и логических операций. Блок состоит из четырехразрядной комбинационной схемы с асинхронным переносом и входных мультиплексоров по двум магистралям. Арифметическо-логическое устройство выполняет арифметические операции (сложение с логической «I», сложение, вычитание) и логические операции (конъюнкция, дизъюнкция, сложение по модулю 2, инверсия). Входные мультиплексоры коммутируют поступающие операнды на входы АЛБ.
Блок регистров общего назначения РОН предназначен для хранения данных внутри АУ. Блок включает в себя восемь 4-разрядных регистров общего назначения РОН. Содержимое регистров поступает на входы АЛБ по магистралям считывания.
Запись информации в один из регистров должна осуществляться с магистрали записи данных.
Блок сдвига теля БС выполняет операции логического и циклического сдвигов 4-разрядных кодов на один разряд вправо и влево.
В рабочий регистр РгА записываются и хранятся 4-разрядные коды результата, полученного при выполнении микрокоманды; в операциях обмена используется в качестве буферного регистр внешних каналов К1 — КЗ.
Регистр состояний РгС индицирует состояния АУ. Регистр включает в себя триггер сравнения с нулем (РгС(О) = То); триггер переполнения (РгС(\) == Гпп); триггер знака (РгС (2} == 7'зн); триггер расширения (РгС(З) =Тр). Сигналы состояния должны заноситься в РгС и выдаваться в КЗ (КЗ-0 — СРО, /<3-1—ПП, КЗ-2 — ЗН; КЗ-3 — Р).
Регистр микрокоманд РгМК предназначен для записи и хранения кода микрокоманды, поступающей в Л У.
Дешифратор микрокоманд ДШ МК формирует управляющие сигналы. Входы дешифратора подключены к РгМК, а, кроме того, ДШ МК должен стробироваться сигналами из БС.
Каналы К.1, К2 предназначены для приема и выдачи информации. Каналы К1 и К2 выдают и принимают информацию в рабочий регистр РгА. Канал КЗ принимает информацию в регистр РгА и выдает информацию из РгС. Разряд 0 — старший разряд информации в KI, разряд 3 — младший разряд информации в KI.
Схемы обмена С01, С02, СОЗ управляют приемом или выдачей информации в (из) АУ: вырабатывают сопровождающие выдаваемую информацию сигналы KIB и отмечают прием информации сигналами К1П. При работе нескольких источников информации на один канал наличие сигнала К1П свидетельствует о занятости канала и блокирует выдачу информации из АУ, но разрешает выполнение следующей микрокоманды. При незавершившемся обмене (сигнал KIB выдан) по KI или К2 в предыдущей микрокоманде схемы С01 или С02 блокирует выполнение следующей микрокоманды до окончания обмена.
Если не завершена выдача информации в КЗ по первой микрокоманде, схема обмена СОЗ не блокирует выполнение следующей микрокоманды при отсутствии в последней признака выдачи состояния (ВС), но сигнал сопровождения КЗВ и информация по каналу КЗ должны сброситься по сигналу Ф[ (из «О» в «I») второй микрокоманды, если нет входного сигнала КЗП. Сигнал КЗП, поступивший на схему обмена СОЗ при выполнении первой микрокоманды, сбрасывает сигнал КЗВ.
Приемом и выдачей информации по каналу KI управляют подачей управляющих сигналов на вывод ЕК1 (разрешение обмена по первому каналу). При выдаче информации и отсутствии сигнала разрешения («I») должен появиться только задний фронт сигнала К/В, а информация в KJ не должна выдаваться. Блок. расширения БР обеспечивает возможность объединения нескольких БИС АУ в одно арифметическое устройство с разрядностью, кратной четырем. При этом не требуется дополнительное оборудование. Блок синхронизации БС организует циклы выполнения микрокоманды. Цикл выполнения микрокоманды должен начинаться при поступлении сигнала С либо положительного фронта сигнала Фа и проходить последовательно три состояния: «Прием», «Чтение», «Запись». Сигналы на Ф] и Фа выводах синхронизации индицируют все три состояния исполнения микрокоманды. Подача на эти выводы управляющих сигналов извне позволит задерживать цикл выполнения любой из микрокоманд, а также работать в режиме внешней синхронизации.