

1. Безусловный переход из адреса Ai по адресу Aj определенному одним из способов адресации (рис. 6.7,а).
2. Условный переход по адресу Aj при выполнении некоторого условия с и по адресу Ak при невыполнении условия (рис. 6.7, б).
3. Выполнение циклов по условию. Реализуется с использованием условного перехода по условию (рис. 6.7, б) или с помощью стека (рис. 6.7, г). При выполнении таких переходов выход из цикла на адрес A* осуществляется по выполнению условия с.
4. Выполнение циклов по заданному числу их повторений. Такая организация реализуется со счетчиком R числа повторений N, входящим в состав УУ (рис. 6.7, (5).
5. Повторение выполнения микрокоманды подачей нулевого сигнала в счетчик/инкрементор адреса.
6. Условный переход к микропрограмме Aj, и возврат из нее по значениям условий с (рис. 6.7, е).
7. Условный переход к микропрограмме Aj и возврат из нее по счетчику количества циклов (рис. 6.7, ж).
8. Безусловный переход к микропрограмме Aj и возврат после ее выполнения к основной программе (рис. 6.7, з).
Для выполнения всех рассмотренных переходов УУ должно содержать в своем составе: средства мультиплексирования внутренних источников адреса (переходы типа 1—6), регистр микропрограммного счетчика с инкрементором и директором нуля (1), полный сумматор (3,4), средства маскирования/конкатенации полей адреса (6), стековую память со средствами индикации состояния (полный/пустой). Для адресации внешними устройствами микропрограммная память на выходе должна иметь буферные схемы с тремя состояниями.
Устройство с инкрементным счетчиком для определения следующего адреса является самым простым. Адрес следующей микрокоманды определяется увеличением на единицу адреса исполняемой команды. Такое устройство управления предполагает естественный порядок следования микрокоманд, при котором последующие микрокоманды отличаются адресом на единицу от предыдущих. Для организации условных и безусловных переходов в устройствах с естественной последовательностью микрокоманд должны быть предусмотрены специальные служебные микрокоманды и источники адреса команды условного перехода. Достоинство этого устройства управления — малая длина слова микрокоманды и возможность достигнуть высокого быстродействия в формировании адреса, недостатки — сложность организации циклов в микропрограмме, сложность размещения отдельных последовательностей микрокоманд и формирования переходов от одной последовательности микрокоманд к другой в управляющей памяти.
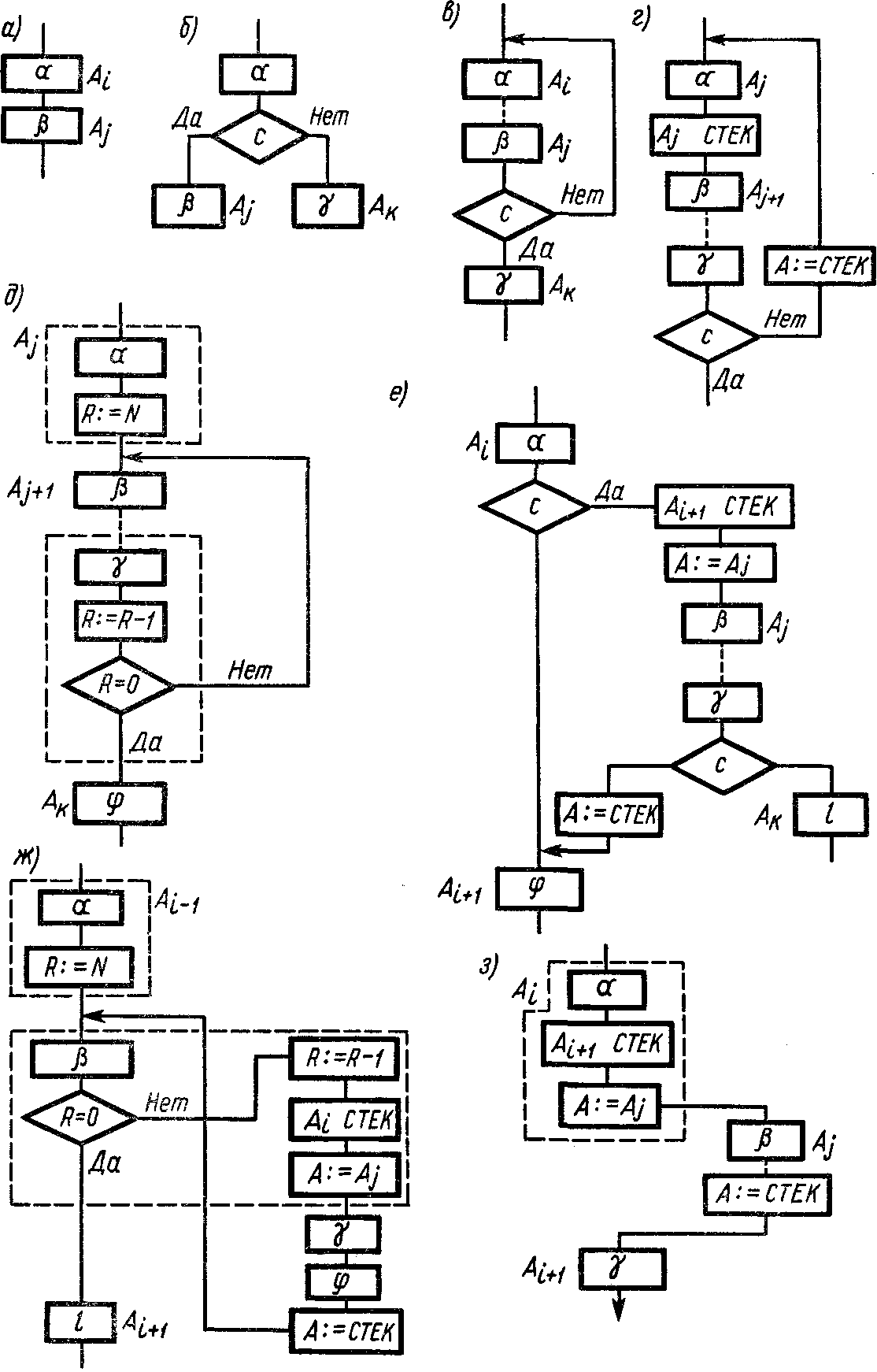
Рис. 6.7. Основные типы микропрограммных переходов

Рис. 6.8. Схемы генерации адреса на базе инкрементного счетчика (а) и с полем «следующего адреса» (б)
На рис. 6.8, а представлена схема блока генерации адреса на базе инкрементного счетчика. Мультиплексор МС управляется микропрограммно и обеспечивает поступление на вход регистра адреса РгА либо информации внешней магистрали Ml, либо информации с выхода инкрементного счетчика Сч. Содержимое инкрементного счетчика увеличивается на единицу после исполнения очередной микрокоманды. Переход к другой последовательности микрокоманд требует формирования на Ml начального адреса новой последовательности и последующей передачи управления инкрементному счетчику.
Устройства с полем «следующего адреса» в составе микрокоманды позволяют организовать произвольный порядок следования микрокоманд. В поле «следующего адреса» исполняемой микрокоманды указывается адрес следующей микрокоманды. При условных переходах адрес микрокоманды формируется по установленному алгоритму из информации в поле «следующего адреса» и поступающих из операционного устройства и внешних устройств кодов признаков. Достоинство этой структуры в том, что в ней легко реализуются циклы, условные и безусловные переходы, недостаток — большая длина слова микрокоманды и связанное с этим усложнение процесса программ. На рис. 6.8, б представлена схема блока генерации адреса с полем «следующего адреса», используемая в МПК серии К589. Основой для формирования адреса являются информация на одной из двух внешних магистралей Ml и М2 и информация поля «следующего адреса» ПЗУ. Источники адресов объединены в мультиплексоре МС, управляемом микропрограммно.
Адрес следующей микрокоманды при входе в программу определяется содержимым одной из магистралей Ml или М2, а при исполнении программы — кодом поля «следующего адреса», входящим в состав микрокоманды. Модификация адреса при организации условного перехода осуществляется по установленному алгоритму в соответствии с содержимым регистра условий РгУ, в который записываются признаки арифметических и логических операций.
Совмещение рассмотренных структур в одном устройстве управления позволяет при естественной последовательности микрокоманд использовать для формирования адреса инкрементный счетчик, а при нарушении естественной последовательности код адреса микрокоманды задавать в исполняемой микрокоманде. Такое устройство должно по содержимому микрокоманды анализировать способ формирования «следующего адреса» и включать в себя аппаратные средства, формирующие адрес по одному из рассмотренных способов. Для формирования условных переходов в устройство управления вводят блоки, которые в зависимости от значения кодов признаков модифицируют адрес следующей микрокоманды.
Использование стека (стековой магазинной памяти) в блоке генерации адреса микрокоманды позволяет применить принцип модульности при написании микропрограмм. Микропроцессоры со стековой организацией эффективны в тех случаях, когда основная программа содержит совокупность подпрограмм или программных модулей, повторяющихся в ходе выполнения основной программы.
Существуют различные варианты реализации стека на сдвиговых регистрах или на ячейках памяти. Емкость стековой памяти на регистрах ограничена количеством регистров, на которых организован стек. Ограничений по емкости лишен стек, использующий участок основной памяти и регистр, хранящий адрес текущей верхушки стека и называемый указателем стека. При обращении к стеку в ячейку, адрес которой определяется указателем стека, записывается адрес микрокоманды. Содержимое указателя стека увеличивается на единицу. При возвращении к основной программе содержимое указателя стека уменьшается на единицу и указывает адрес выхода из подпрограммы. Число вложений микропрограмм в таком стеке определяется количеством отведенных для стека ячеек памяти.
На рис. 6.9, а приведена схема блока формирования следующего адреса, применяемая в МПК серии К1804, в которой используются все рассмотренные способы формирования адреса.
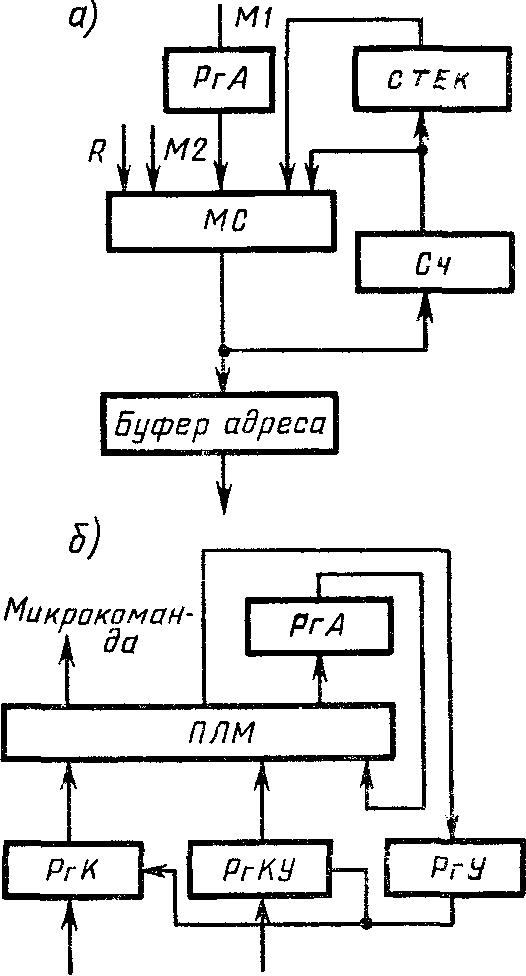
Рис. 6.9. Схемы БИС серии К 1804 (а) и серии К587 РП1 (б)
Установка начального адреса микропрограммы может быть произведена по одному из кодов, поступающих по магистралям Ml и М2 на вход мультиплексора.
На два других входа мультиплексора поступают коды с инкрементного счетчика и стековой памяти. Стек состоит из четырех регистров и указателя стека. Указатель стека работает как реверсивный счетчик, имеющий два управляющих входа: записи чтения и разрешения обращения.
Выбор одного из четырех входов мультиплексора осуществляется по двум управляющим входам поля микрокоманды. Выходная информация на магистрали адреса может быть модифицирована кодом, подаваемым на вход М2. По входу R возможна установка нулевого значения на соответствующих разрядах выходного адреса.
Использование рассмотренных способов формирования адреса микрокоманды реализует принцип модульности при написании микропрограмм. Адрес в подобной структуре блока генерации адресов может быть получен либо из инкрементного адресного счетчика, либо из поля «следующего адреса» текущей микрокоманды, либо из адресного стека, либо модификацией регистра признаков.
Такая структура позволяет гибко адресовать программную память, способствует локализации микропрограмм. Наличие стека делает возможным формирование программ из микропрограммных модулей и организацию сложных программных последовательностей.
Устройства управления на ПЛМ. В этих устройствах в отличие от рассмотренных схем совмещены функции узла генерации адреса микрокоманды с памятью микропрограммы. Рассмотрим схему такого устройства на примере МПК серии К587 (рис. 6.9, б).
Структура устройства содержит память микропрограмм типа ПЛМ, регистр команд РгК, регистр кода условий РгКУ, регистр следующего адреса РгА и регистр признаков управления РгУ.
Регистр признаков управления содержит маски на сигнал записи в регистр команд, регистр следующего адреса и регистр кода условий. Часть сигналов с выхода ПЛМ выводится для управления операционной частью как микрокоманда, а другая часть выходных сигналов ПЛМ не выводится из корпуса БИС и используется для формирования следующего адреса и кода регистра управления. Программируемая логическая матрица позволяет анализировать большое число разрядов, что исключает необходимость в управляемых мультиплексорах. Совокупность всех разрядов РгК, РгКУ и РгА используется как полное адресное слово для ПЛМ.
Регистр команды служит для приема кода команды, задающего устройству управления программу выборки последовательности кодов микрокоманд, выполняя которые микропроцессор реализует алгоритм данной команды. Для этого один из выходов ПЛМ программируется на выработку разрешения на прием новой команды. Выборка той или иной микрокоманды в процессе выполнения алгоритма какой-либо команды микропроцессора не всегда является строго заданной, а
может зависеть от условий — результатов операций, зафиксированных в регистре условий.
Регистр адреса является главным задающим звеном при выборке последующей микрокоманды. Разрядность п регистра адреса позволяет устройству управления создавать 2" устойчивых состояний без смены кода команды и кода условий.
Способность ПЛМ порождать новые информационные состояния комбинацией имеющихся закодированных состояний, путем их простого объединения, расширяет•логические возможности ПЛМ как цифрового автомата. Рассмотренное устройство не содержит стековой памяти и, следовательно, не предусматривает модульного программирования. Из рассмотренных устройств на структуру микро-ЭВМ в наибольшей степени влияет вариант реализации устройства управления. Можно выделить три наиболее характерных варианта: реализация в однокристальном процессоре, объединяющем в себе операционную часть и устройство управления; реализация устройства управления в виде микропрограммного автомата с использованием ПЗУ и ППЗУ для записи микрокоманд; реализация устройства управления на основе ПЛМ.
В микропроцессорных комплектах серий К587, К.588, К1883 устройства управления реализованы на основе ПЛМ. Микропроцессорные комплекты серий К.580, К.1801, К1810, К1816, К1820 содержат в своем составе БИС, в которой реализованы центральный процессор и устройство управления с фиксированной структурой и системой команд. В МПК серий К583, К589, КР1800, КР1802, КР1804 устройство управления строится в виде микропрограммного автомата на базе входящих в эти комплекты БИС, что позволяет потребителю реализовать на их основе необходимую ему систему команд. Микропроцессорные комплекты серий К.536, К.581 предназначены для построения микро-ЭВМ семейства «Электроника С» и «Электроника-60».
Микропроцессорные комплекты серии К 1801 включают в себя однокристальный МП К1801ВМ1, реализующий в себе процессор и устройство управления с системой команд микро-ЭВМ «Электроника-60», и ряда БИС для построения одноплатных микро-ЭВМ. По своим техническим характеристикам МПК серий К580, К1816, К1810, К1820, содержащие однокристальные МП, целесообразно применять для получения устройств цифровой автоматики, простейших контроллеров, а также использовать для построения микро- и мини-ЭВМ различного назначения. Микропроцессорные комплекты серий К583, К584, К587, К588 предназначены для построения микро-ЭВМ и сложных контроллеров. Благодаря секционной организации, развитой системе магистралей, микропрограммируемости управляющих функций они могут служить основой для построения различных управляющих систем. Малое энергопотребление и высокая помехоустойчивость МПК серий К587 и К588 позволяют проектировать на их основе системы числового программного управления технологическим оборудованием и устройства с ограничениями по потребляемой энергии.
Быстродействующие МП К серий К589, КР1802, КР1804 предназначены для построения микро-ЭВМ и систем быстродействующей автоматики, совместимы по уровням сигналов и могут дополнять друг друга. Микропроцессорные комплекты серий КР1802 и К1804 отличаются подходом к формированию модулей. В МПК КР1804 4-разрядные микропроцессорные БИС содержат все элементы микропроцессора. В МПК серии КР1802 в БИС выполняются отдельные функциональные узлы МП (БИС 8-разрядного АЛБ, БИС 16 4-разрядных РОН, БИС 16-разрядного арифметического расширителя и т.д.). Отличие по составу модулей рассмотренных МПК позволяет применить для различных областей наиболее подходящий из них по функциональному разбиению.
Микропроцессорный комплект серии КР1800 обладает сверхвысоким быстродействием (частота тактовых сигналов 36 МГц) и ориентирован на построение вычислительных средств с высокой производительностью.