

§1.2 Структуры типичных микроЭвм
Процессоры современных микроЭВМ (микропроцессоры) обычно изготавливают в виде одной большой интегральной схемы (БИС), имеющей до 300 тыс. элементов в кристалле, или в виде одной печатной платы, на которой кроме процессора часто размещают еще генератор тактовой частоты, часть памяти ЭВМ и ряд других устройств. Такой микропроцессор должен соединяться системой шин с памятью и контроллерами внешних устройств, и эти соединения должны осуществляться через выводы БИС или контакты разъема (разъемов) печатной платы. Определим, сколько выводов требуется процессору базовой ЭВМ, чтобы он мог обмениваться информацией с памятью и ВУ.
Для связи с памятью процессору базовой ЭВМ необходимо передавать адрес (11-разрядная шина адреса), получать команды или операнды (16-разрядная шина «Чтение») или передавать результаты (16-разрядная шина «Запись»). Кроме того, необходимы провода для передачи ряда управляющих сигналов, т. е. всего около 45 проводов. Для связи с контроллерами ВУ процессор должен иметь около 30 проводов (8 — шина ввода, 8 — шина вывода, 8 — адрес ВУ, состояние флагов ВУ, запрос на прерывание и др.).
Следовательно, при изготовлении в виде БИС процессору базовой ЭВМ требуются более 75 выводов (надо подавать еще и питающие напряжения), а при изготовлении на печатной плате — два разъема по 40 или 48 контактов в каждом. Такое количество выводов БИС или печатной платы неоправданно увеличивает их геометрические размеры, массу и стоимость (в настоящее время приходится учитывать стоимость печатных соединений, разъемов и кабелей, служащих для связи между устройствами ЭВМ).
Сокращения выводов БИС (контактов разъемов) добиваются за счет использования двунаправленных шин. Так, вместо шин «Чтение» и «Запись» можно иметь лишь одну шину, по которой в зависимости от значения дополнительного управляющего сигнала (READ/WRITE) данные передаются либо из памяти в процессор, либо в обратном направлении (сокращение на 15 выводов) . Аналогичную двунаправленную шину можно использовать и для связи с контроллерами ВУ (ввод или вывод по сигналу IN/OUT), благодаря чему достигается сокращение еще на 7 выводов. Полученную таким образом структуру (рис. 1.1, а) будем называть структурой с раздельными шинами.
Сходство процессов обмена информацией процессора — ячеек памяти и процессора — регистров контроллеров ВУ приводит к мысли об использовании одних и тех же выводов для связи с памятью и контроллерами ВУ, т. е. об организации структуры, изображенной на рис. 1.1, б. При такой структуре ЭВМ (структуре с изолированными шинами ) число выводов БИС сокращается еще на 16, но исчезает возможность одновременного обмена информацией между процессором, памятью и каким-либо ВУ. Чтобы занять шины для обмена с памятью, процессор подает управляющие сигналы R/W (READ/WRITE), а для обмена с ВУ — сигналы I/O (IN/OUT).
Дальнейшего сокращения выводов БИС микропроцессора с трехшинной структурой (шина адреса, данных и управления) можно добиться за счет объединения адресной шины и шины данных (двухшинная структура на рис. 1.1, в). При этом возникает так называемая мультиплексная шина (от лат. multiplex — многократный), по которой в одни моменты времени передаются адреса, а в другие — данные. Такая структура позволила бы создать БИС микропроцессора базовой ЭВМ всего лишь с 30 выводами.
Еще большего упрощения структуры процессора и шин добиваются за счет исключения команд ввода-вывода из системы команд ЭВМ. При этом часть адресного пространства памяти (пространства, определяемого разрядностью регистра адреса) отводят для адресов регистров контроллеров ВУ и используют для ввода и вывода любые команды ЭВМ, которые осуществляют запись данных в эту «область памяти» (в базовой ЭВМ команда MOV) и чтение из нее (например, ADD, AND из состава команд базовой ЭВМ).
Структуры с вводом-выводом, организованным по аналогии с обращением к памяти (структуры с общими шинами), появились в начале 70-х годов.
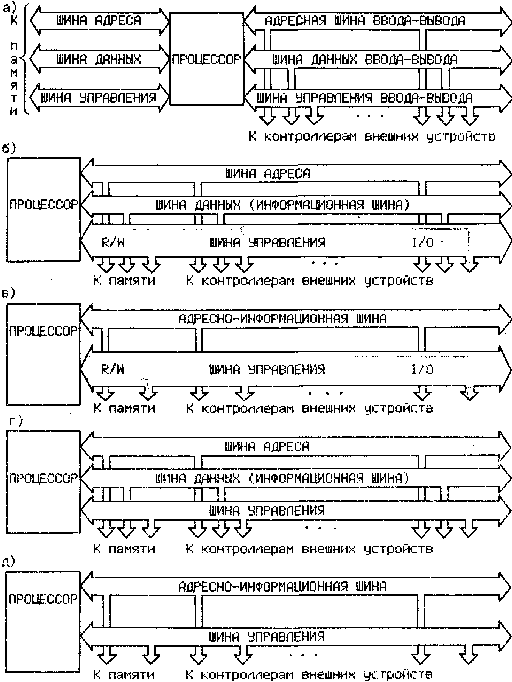
Рис. 1.1. Структуры микроЭВМ:
а) — с раздельными шинами; б) — с изолированными шинами; в) — с изолированными шинами и мультиплексированием шин адресов и данных; г) — с общими шинами; д) — с общими шинами и мультиплексированием шин адресов и данных.
В первой из них (структура типа представленной на рис. 1.1, г) при 16-разрядной адресной шине адреса с 0000 по DFFF (56K * байт) отведены для ячеек памяти, а адреса с ЕООО до FFFF (8K байт) — для регистров данных контроллеров ВУ. Для ввода-вывода используют команды обращения к памяти с адресами от ЕООО до FFFF. Процессор как бы обманывают, заставляя его выполнять операцию с регистром данных контроллера ВУ, тогда как процессор работает так, как если бы он имел дело с ячейкой памяти ЭВМ.
Во всех современных микропроцессорах (даже в тех, которые имеют команды ввода-вывода) можно организовать ввод-вывод по аналогии с обращением к памяти. Некоторые из них обладают богатым набором команд (в том числе арифметических и логических) и способов адресации операндов, расположенных в памяти ЭВМ. Для таких микропроцессоров организация ввода-вывода по аналогии с обращением к памяти особенно выгодна.
Описание связей между процессором, памятью и контроллерами ВУ, выполненное по типу рис. 1.1, не позволяет ответить на множество чрезвычайно важных вопросов.
Каков способ передачи данных (словами, байтами или битами)?
Каков способ передачи адреса?
Какими управляющими и (или) осведомительными сигналами сопровождается передача адреса и данных?
Какие осведомительные сигналы (о состоянии памяти и ВУ) пересылаются в процессор? Как должны быть распределены во времени информационные, управляющие и осведомительные сигналы? Какими напряжениями кодируются двоичные 0 и I?
С каких выводов БИС или разъема можно снять тот или иной сигнал и на какие подать? Какой тип разъема надо использовать для подключения к процессору?
Ответы на эти и многие другие вопросы можно получить, ознакомившись с системным интерфейсом (англ. interface—общая граница).
Системный интерфейс —это набор цепей, связывающих процессор с памятью и контроллерами ВУ, алгоритм передачи сигналов по этим цепям, их электрические параметры и тип соединительных элементов.
К процессору микроЭВМ обычно подключается достаточно много внешних устройств. Это могут быть: различные датчики и исполнительные органы систем управления каким-либо объектом или прибором; устройства для долговременного хранения результатов измерения или обработки экспериментальных данных (магнитные ленты и диски); различные клавиатуры, индикаторы и печатающие устройства. Многие из этих ВУ начала выпускать промышленность задолго до появления современных микроЭВМ и иногда совсем для других целей (например, ВУ телетайп—телеграфный аппарат, имеющий клавиатуру, считыватель с перфоленты, перфоратор и печатающее устройство). ВУ свойственны различное быстродействие, различный набор управляющих сигналов, различные электрические параметры, т. е. их интерфейс (интерфейс ВУ), как правило, не совместим с системным интерфейсом микроЭВМ. Для сопряжения микроЭВМ с ВУ (системного интерфейса с интерфейсом ВУ) используют контроллеры ВУ.
Упрощения и унификации аппаратуры сопряжения добиваются за счет введения промежуточного стандартного интерфейса параллельной или последовательной передачи данных. В этом случае для подключения к микроЭВМ различных ВУ с такими стандартными интерфейсами можно использовать одинаковые (для данной ЭВМ) контроллеры параллельного или последовательного интерфейса. Такие контроллеры (иногда их называют интерфейсами или адаптерами) серийно выпускают в виде программируемых БИС для всех распространенных микроЭВМ.
Так как у терминов интерфейс, контроллер и адаптер нет общепринятых четких определений, то в литературе они часто считаются синонимами.