

2.3.2. Передвижение в виртуальном пространстве
Передвижение в виртуальном пространстве связано с необходимостью позиционирования. Обычная двумерная мышь как устройство указания точек на плоскости имеет всего 2 степени свободы. При работе в среде ВР приходится задавать координаты точек уже в трехмерном пространстве, причем часто возникает необходимость задавать не только сдвиги по трем осям, но и вращения вокруг этих осей (рис.2.1), что требует уже 6 степеней свободы.
Рассмотрим различные методы и устройства, выполняющие подобные функции [6]. Для «настольных» систем ВР можно использовать обычную мышь: ее указатель проецируется на перспективный вид и служит для выбора нужного объекта. Повороты и смещения осуществляются:
с помощью специального интерфейса режимов (3×2), когда смещение мыши задает сдвиг в заданной плоскости или поворот вокруг заданной оси (или обеих осей плоскости);
с помощью некоторой более наглядной модели – например, «виртуальной сферы», окружающей выбранный объект. Тогда повороты можно выполнять, касаясь мышью разных точек на воображаемой поверхности этой сферы (подобным образом мастера футбола выполняют штрафные удары, закручивая мяч в обход «стенки» из игроков противника в определенную сторону в нужный верхний или нижний угол ворот).
Позиционные датчики. В «погружающей» среде ВР используются 6-степенные позиционные датчики. Наиболее распространены устройства, построенные на ортогонально расположенных (в центрах граней условного внешнего куба) электромагнитных индукционных датчиках. Передающая катушка наводит ток в приемной, а по силе этого тока можно определить расстояние от приемника до передатчика и, в конечном счете, положение передатчика относительно приемника. Такие устройства обеспечивают довольно высокую точность позиционирования и быстродействие. Их недостатки – высокая цена и повышенная чувствительность к находящимся в помещении ферромагнитным материалам, а также к электромагнитным полям, создаваемым, например, мониторами рабочих станций (в свою очередь, поле датчика влияет на работу мониторов) [6].
Первый электромагнитный датчик был разработан компанией Polhemus для оцифровки 3D-объектов и позднее адаптирован для ВР. Выпустив свой датчик Bird, компания Ascension Technology составила конкуренцию компании Polhemus, и эти компании стали соревноваться друг с другом за большее быстродействие из-за проблемы запаздывания сигналов датчика, поскольку требуется некоторое время (около 50 мс) для вычисления текущих координат. Точность оценки положения для датчика Polhemus из-за присутствия поля во всем помещении составляет несколько сантиметров даже вблизи передатчика и становится меньше по мере удаления от него. У датчика Bird точность значительно выше.
Акустические методы позиционирования основаны на использовании коротких ультразвуковых сигналов, принимаемых группой микрофонов (обычно тремя), находящихся на определенном расстоянии от объекта. Расположение объекта и расстояние до него рассчитывается по времени прихода сигналов на микрофоны. Такие акустические позиционные устройства от компании Logitech. имеют довольно низкую цену, но и невысокое пространственное разрешение, чувствительны к шумам в помещении и требуют, чтобы приемник и передатчик находились в условиях прямой видимости [6].
Самая высокая точность и, к сожалению, громоздкость отличает устройства с механическими контактами (рис.2.19). Существует много таких устройств разной сложности – от сравнительно дешевого датчика положения головы до стереоскопического дисплея ВООМ с высоким разрешением и позиционированием [6].
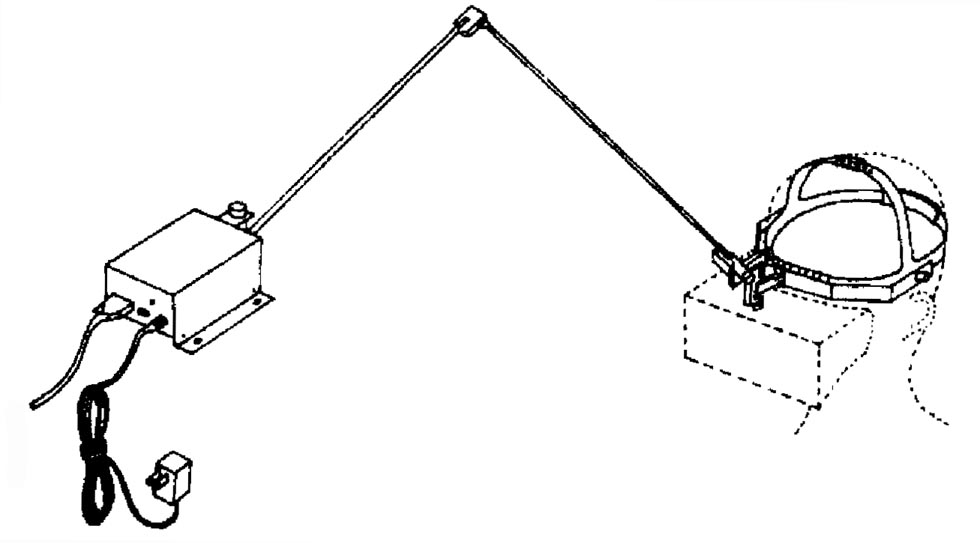
Рис.2.19. Устройство с механическими контактами
Оптические методы определения пространственных координат могут производить полный анализ экранных изображений объекта или отслеживать положение индикаторов (светодиодов) или других маркеров, закрепленных на объекте. Такие маркеры, как правило, не создают помех, но требуют, чтобы отслеживаемый объект находился в прямой видимости [63].
Мы рассмотрели датчики, определяющие абсолютные положения объекта в пространстве. Но можно вычислять координаты объекта в пространстве и на основании проделанных им перемещений, отслеживая скорость и направление перемещения, заданные манипуляторами типа джойстик. Например, устройство Space Ball представляет собой манипулятор с шестью степенями свободы.
Можно было бы также использовать устройства, следящие за движением глаз наблюдателя, чтобы получить информацию о том, куда направлено его внимание. Но в «погружающих» системах ВР глаза наблюдателя скрыты под HMD [6].