

2.3 Силовой анализ
2.3.1 Задачи и методы силового анализа
Силовой анализ механизмов является одним из важных этапов их проектирования, поскольку силы, действующие на звенья механизма, необходимо знать при расчете на прочность, при подборе подшипников, при определении мощности электродвигателя и т.д.
Все силы, действующие на звенья механизма можно разделить на две группы:
а) внешние или активные силы, к которым относятся движущие силы (моменты), силы сопротивления движению, силы тяжести, силы инерции;
б) внутренние силы или силы реакций в кинематических парах. Основными задачами силового анализа рычажных механизмов
являются:
а) определение внешних сил, которые действуют на отдельные звенья механизма;
б) определение сил реакций в кинематических парах механизма; в) определение необходимого движущего (уравновешивающего)
момента.
Если при силовом анализе не учитываются силы инерции, то в этом случае пользуются методами статики, и такой расчет называют статическим.
Если при силовом анализе учитываются те динамические силы, которые возникают в результате движения механизма (силы инерции), то расчет называют динамическим. Если для выполнения динамического расчета применяют метод кинетостатики, основанный на принципе Даламбера, то такой расчет называют кинетостатическим.
Сущность этого метода может быть сформулирована так: если ко всем внешним действующим на звено силам условно присоединить силы инерции, то под действием всех этих сил звено можно рассматривать условно находящимся в равновесии.
2.3.2 Определение внешних сил
Движущие силы – это силы, развиваемые двигателем, необходимые для преодоления всех сил сопротивления. Эти силы приложены к ведущему звену, направление их совпадает с направлением движения звена, т.е. движущие силы совершают положительную работу +Адв (на отдельных этапах цикла это условие может быть нарушено).
Зависимость движущей силы от кинематических параметров называется механической характеристикой двигателя M д = М д (ω )
Рисунок 2.26 |
Рисунок 2.27 |
На рисунке 2.26 дана механическая характеристика асинхронного электродвигателя.
В рабочем режиме электродвигатели работают при номинальной угловой скорости - ω н и номинальном моменте –Мн.
У асинхронного электродвигателя разгон начинается по неустойчивой ветви механической характеристики – 1, от Мнач до Мкр. В первом приближении разгон по этой ветви описывают линейной зависимостью
М д = аω + в , где а = (Мкр − Мнач ) / ω кр , в = Мнач .
Далее разгон продолжается по устойчивой ветви механической характеристики – 2, до установившегося режима работы – Мн. Устойчивая ветвь описывается уравнением
М д = (ω о − ω ) /(ω о ν ) , или ω = ω о − ω о ν М д ; где ω о - скорость холостого хода электродвигателя (без нагрузки);
ν - коэффициент крутизны механической характеристики.
На рисунке 2.27 дана индикаторная диаграмма четырехтактного двигателя внутреннего сгорания: 1 – такт всасывания рабочей смеси; 2 – сжатия; 3 – рабочий ход; 4 – выброс.
Силы сопротивления стремятся замедлить движение механизма. Их направление противоположно направлению движения, т.е. совершают отрицательную работу – Ас.
Силы сопротивления делятся на полезные технологического назначения и вредные (силы трения в кинематических парах).
Характеристики полезных сопротивлений машин представляют собой в основном восходящие кривые (центробежные насосы, компрессоры, вентиляторы). В курсовых проектах Fп.с. (Мп.с.). Заданы и по направлению и по величине.
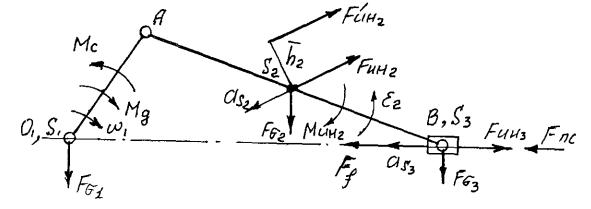
Силы тяжести (силы веса) приложены в центрах тяжести (рисунок 2.28) и направлены вниз
Fσ i = mi g ,
где mi – масса звена i, кг;
g – ускорение свободного падения, м/с2.
Рисунок 2.28
Они производят положительную работу, когда центры тяжести звеньев опускаются, и отрицательную, когда центры тяжести звеньев поднимаются ±
Атяж.
Силы инерции.
Результирующая сила инерции звена, Н

Fинi = − miaSi ,
где mi – масса звена в кг;
aSi – вектор полного ускорения центра масс Si звена в м/с2.
Силы инерции звена приложены в его центре масс и направлены в сторону противоположную полному ускорению центра масс (которое находится из плана ускорения) (рисунок 2.28).
При плоско-параллельном движении, если вращение звена неравномерное, возникает момент пары сил инерции, направленный
противоположно угловому ускорению ε2 (рисунок 2.28), Нм
Мин2 = − JS2ε 2 ,
где JS2 – момент инерции звена относительно оси, проходящей через центр
масс S2, перпендикулярный плоскости движения, кг/м2; ε2 - угловое ускорение, 1/с2.
Силы трения – Ff всегда направлены в сторону противоположную движению (ползун на плоскости, рисунок 2.28).
2.3.3 Трение в кинематических парах
Трением называется сопротивление относительному перемещению соприкасающихся тел, возникающее в месте их соприкосновения.
Внешнее трение – на поверхности двух или нескольких тел. Внутреннее трение – при смещении частиц одного тела по
соотношению к другому.
По характеру перемещения различают три вида трения:
-трение скольжения (I рода);
-трение качения (II рода);
-трение верчения (III рода).
По характеру смазки трущихся поверхностей различают:
-чистое трение – между химически чистыми поверхностями в условиях вакуума;
-сухое трение – смазка отсутствует;
-граничное трение - слой смазки 0,1 мкм и менее (выступы поверхностей касаются);
-жидкостное трение – поверхности полностью разделены слоем
смазки;
-полусухое трение – сочетание сухого и граничного;
-полужидкостное трение – сочетание жидкостного и граничного. Граничное, полусухое и полужидкостное трение объединяют общими
названиями – трение при несовершенной смазке.
2.3.3.1 Трение скольжение в поступательной паре
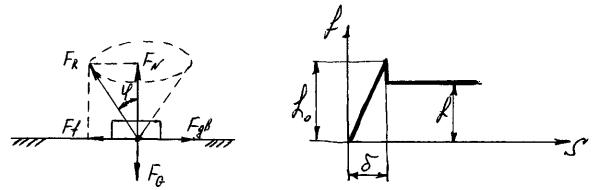
Рассмотрим ползун, движущийся по направляющей с постоянной скоростью (рисунок 2.29). В начальный момент движения при Fдв < Ff
различают силу трения покоя - Ff0 .
Ff 0 = f0FN , где f0 - коэффициент трения покоя.
Если сдвигающее усилие Fдв становится больше Ff0 , то начинается относительное движение ползуна.
Сила трения Ff движения не зависит от движущей силы Fдв и направлена в сторону противоположную относительной скорости
скольжения Ff = fFN |
(т.е. формальная зависимость). |
В большинстве |
случаев f0 > f . График зависимости коэффициента |
трения f от относительного смещения S трущихся тел выражается ломаной линией, где отрезок δ - максимальная величина предварительного смещения (рисунок 2.30).
Полная сила реакции FR складывается из нормальной реакции FN и силы трения Ff (рисунок 2.29).
Рисунок 2.29 |
|
Рисунок 2.30 |
tg ϕ = |
Ff |
= f , а ϕ = arctg f . |
|
||
|
FN |
|
Угол отклонения полной реакции от нормали называется углом трения. Все возможные направления полной реакции заключаются в пределах конуса трения (рисунок 2.29).
Поверхность контакта ползуна и направляющей могут иметь вид симметричного двугранного угла (клинчатый ползун) (рисунок 2.31).
Рисунок 2.31 Рисунок 2.32
Движение ползуна происходит под действием силы Fдв. FG – сила веса;
FN1 и FN2 - нормальные реакции, одинаковые по величине (FN1 = FN2
).
Величина силы трения клинчатого ползуна
Ff = f(FN1 + FN2 ) = 2fFN . Векторное уравнение равновесия клинчатого ползуна
FN1 + FN2 + FG = 0.
Из силового треугольника (рисунок 2.32) |
|
FG |
|
|||||||||||
|
|
|
FG |
= 2FN sin α |
, |
откуда |
2FN = |
. |
||||||
|
|
|
|
|||||||||||
|
|
|
FG |
|
|
f |
|
|
|
|
|
sin a |
||
Тогда F = f |
= |
|
F = |
f'×F , |
|
|
|
|||||||
|
|
|
|
|
||||||||||
|
f |
sin a |
|
sin a |
G |
|
G |
|
|
|
||||
|
f |
|
|
|
|
|
|
|
||||||
где f'= |
- коэффициент трения клинчатого ползуна всегда больше |
|||||||||||||
sin a |
|
|||||||||||||
коэффициента трения плоского ползуна. |
|
|
|
|||||||||||
2.3.3.2 Трение во вращательной паре (работа подшипников |
||||||||||||||
скольжения) |
|
|
|
|
|
|
|
|
|
|
|
|||
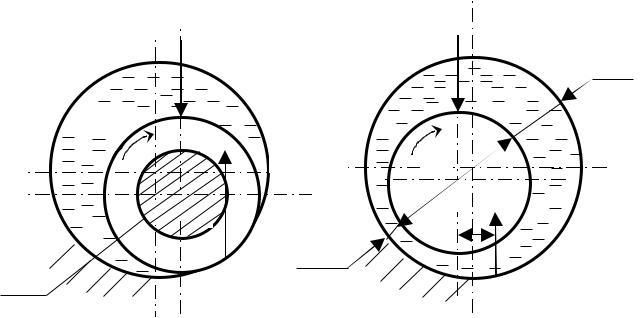
= d − dц |
- диаметральный |
зазор, |
величина соответствующая |
|||||||||||
легкоходовым посадкам (рисунок 2.33). |
|
|
|
|||||||||||
dц – диаметр цапфы вала. |
|
|
|
|
|
|
||||||||
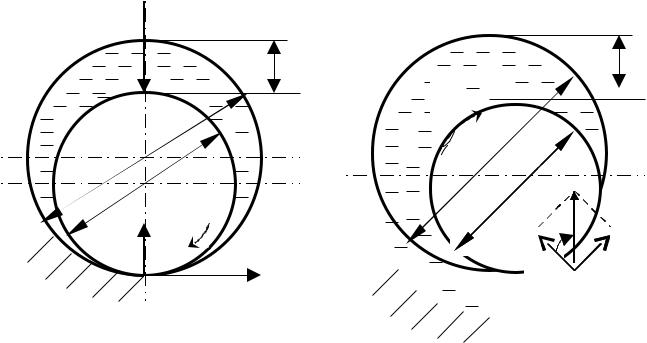
При ω = 0 цапфа и |
|
вкладыш контактируют в точке А. Большая часть |
||||||||||||
поверхности не разделена смазкой и трение будет полусухое.
 G
G
F
ω
|
|
ω |
ϕ |
F |
|
Ff |
|
|
|
||
|
|
FN |
|
|
А |
|
Ff |
|
|
А′ |
|
|
|
|
Рисунок 2.33 |
|
|
|
|
|
|
Рисунок 2.34 |
||
В начале движения аналогично различают силу трения покоя и силу |
|||||||||
трения движения. |
|
Ff = fцFN = fцFG , |
|
|
|||||
|
|
|
|
||||||
где fц – коэффициент полусухого трения в цапфе близок к |
|||||||||
коэффициенту трения на плоскости |
|
|
|
dц |
|
||||
f |
ц |
» f , |
M |
f |
= F × |
. |
|||
|
|||||||||
|
|
|
f |
2 |
|
||||
При вращении вала под действием Ff цапфа перемещается в сторону обратную вращению, как бы «взбегает» на подшипник (рисунок 2.34). Трение становится граничным
|
|
|
Ff |
|
= f × FN = |
f × FR cos j , |
|||||||
|
|
π |
Ff = f'×FG , |
|
|
изменяется от 0 до π . |
|||||||
где |
f'= f cos j = f |
, так как угол ϕ |
|
||||||||||
2 |
|
||||||||||||
Момент трения |
|
|
|
|
|
|
|
|
|
2 |
|||
|
|
|
|
dц |
|
|
|
|
dц |
|
|||
|
|
|
M |
|
= F |
= F × f' |
. |
||||||
|
|
|
|
2 |
|
2 |
|||||||
|
|
|
|
f |
f |
|
|
G |
|
||||
Если из центра вала Оц описать радиусом |
ρ окружность, то полная |
||||||||||||
реакция FR будет направлена |
по касательной к этой окружности. Круг |
||||||||||||
радиуса ρ |
по аналогии с углом и конусом трения называется кругом терния |
||||||||||||
(рисунок 2.35). |
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
r » |
f' |
ц |
|
|
|||
|
|
|
|
|
|
2 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
||
F |
G |
FG |
h МАХ |
|
|
||
|
|
|
 ω
ω

FR

 Оц
Оц
h МIN
ρ |
А` |
Рисунок 2.35 Рисунок 2.36
При дальнейшем возрастании угловой скорости гидродинамическое давление будет поднимать цапфу и смещать ее в сторону движения (рисунок 2.36).
Появляется сплошной устойчивый слой смазки, перекрывающий все неровности с запасом. Наступает жидкостное трение, при котором износ и заедание отсутствуют.
Определение силы трения в режиме жидкостного трения выполняется на основе гидродинамической теории смазки
Ff = μ S dVdy , где μ - динамическая вязкость масла, Н.С/м2;
S = p × dц × lц - поверхность слоя;
dVdy - градиент скорости (изменение скорости dV по высоте слоя
dy).
Толщина масляного слоя hmin возрастает с возрастанием скорости и вязкости масла и уменьшается с увеличением нагрузки.
При установившемся режиме hmin должна быть больше суммы высот
микронеровностей цапфы и вкладыша Rz1 |
и |
Rz2 |
|
|
hmin = k(R z1 |
+ |
Rz2 ) , |
где k ³ |
2 - коэффициент безопасности. |
|
|
Итак, |
по мере разгона вала в подшипнике скольжения, трение из |
||
полусухого переходит в граничное и жидкостное. Величина коэффициента трения в цапфе будет изменяться.
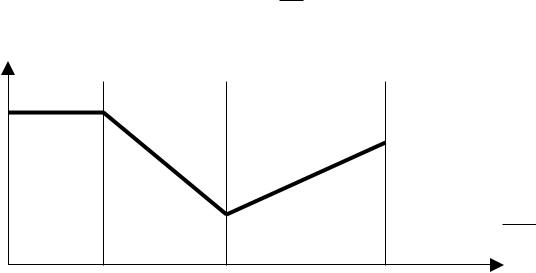
Изменение коэффициента трения происходит в зависимости от безразмерной характеристики режима λ = μpω и имеет три участка (рисунок 2.37 (кривая Штрибека-Герси).
f |
I |
II |
III |
01
2
λ = μРϖ
Рисунок 2.37
μ- динамическая вязкость масла, Н.с/м2;
ω- угловая скорость вала, 1/с;
р- средняя удельная нагрузка, Н/м2.
I участок – 0-1 – соответствует первому режиму работы, трение полусухое.
II участок – 1-2 – граничное (полужидкостное) трение (микронеровности цапфы и вкладыша касаются). Величина коэффициента терния уменьшается.
III участок – 2-3 - режим жидкостного трения. Увеличение коэффициента трения обуславливается внутренними силами вязкой смазки.
Оптимальные условия работы подшипников скольжения будут справа от точки 2.
2.3.3.3 Трение качения
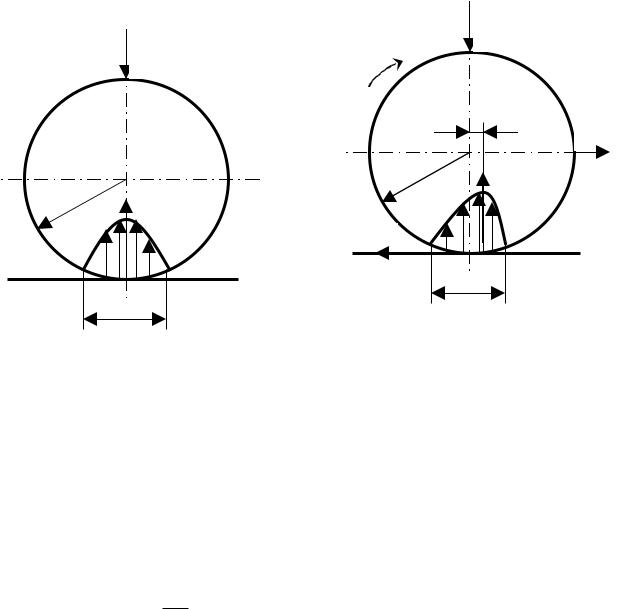
Рассмотрим цилиндр, лежащий неподвижно на плоскости и нагруженный радиальной силой FG (рисунок 2.38, а). В зоне контакта – b - действуют контактные напряжения. Эпюра этих напряжений симметрична, а линия действия равнодействующей – FN их совпадает с линией действия FG.
ω |
|
FG |
FG |
|
|
|
|
к |
|
|
Fдв |
|
|
FN |
FN |
|
|
Ff |
|
|
Рисунок 2.38 |
б) |
В |
|
||
|
|
|
В |
|
|
При перекатывании цилиндра по плоскости один участок зоны контакта – b – находится в области нарастающих деформаций, а другой – в области затухающих (рисунок 2.38, б). Равнодействующая FN = FG смещена в сторону движения на величину К, которую называют плечом силы терния качения, или коэффициентом трения качения.
Момент трения качения (момент сопротивления движению)
Mff = KFN = KFG
При равномерном качении под действием силы Fдв момент движущих сил - Mдв
M дв = Fдв × r
равняется по величине Mтр.
Откуда Fдв = K FrG - необходимая движущая сила, где r – радиус цилиндра.
Для обеспечения чистого качения (без скольжения) необходимо чтобы сила Fдв была меньше силы трения скольжения, приложенной к цилиндру в месте его касания с плоскостью (силы трения покоя)
|
|
Ff0 = f0FG , |
|
|
|
где f0 – коэффициент трения покоя, т.е. |
K F |
|
|
||
Fдв < Ff |
|
, или Fдв < f0FG , или |
< f |
F . |
|
|
0 |
|
r G |
|
0 G |
Откуда f0 < Kr .
Таким образом, чтобы имело место чистое качение, необходимо, чтобы коэффициент трения скольжения был больше отношения Kr .
Заметим, что К имеет размерность – мм.
1. Трение верчения (трение в упорных подшипниках)
При действии на вал осевой нагрузки FG ставят упорные подшипники
(рисунок 2.39). |
FG |
2 |
|
|
1
1 – подпятник,
2 – пята.
ω |
М f |
d
D
Рисунок 2.39
Считаем, что сила распределяется равномерно по всей площади прилегания
S = |
π (D2 − d2 ) |
. |
|
4 |
|||
|
|
На поверхности кольца с диаметрами D и d действует среднее давление
p = |
4FG |
|
|
|
. |
||
π (D |
2 |
− |
d |
2 |
) |
||
|
|
|
|
||||
Элементарный момент трения на элементарном кольце (рисунок 2.40) dMf = dFf × r = dFN × f × r = (p2p r dr )f × r .
FG |
2 |
|
|
dF |
|
|
ω |
|
|
ω |
|
|
М f |
1 |
|
М f |
|
D |
d |
|
|
|
|
|
d |
|
|
dρ |
|
Рисунок 2.40 |
Рисунок 2.41 |