

J » 110 d5 . |
(8.8) |
Массы и моменты инерции звеньев рычажного |
механизма заданы в |
задании на курсовой проект. |
|
8.2 Приведение масс
Приведение масс заключается в замене действительных масс звеньев механизма одной эквивалентной или приведенной массой, перенесенной условно на какое-либо звено, которое называется звеном приведения. В качестве звена приведения можно выбирать любое звено. Приведенная масса звена приведения должна иметь кинетическую энергию, равную кинетической энергии всего механизма.
Кинетическая энергия звена, совершающего вращательное движение равна половине произведения момента инерции звена относительно оси вращения на квадрат угловой скорости, Нм
Т = |
1 JSi w i2 . |
|
2 |
Кинетическая энергия звена при поступательном движении равна половине произведения массы на квадрат скорости центра масс
Т = 21 mi VSi2 .
При плоскопараллельном движении кинетическая энергия равна сумме кинетических энергий от вращательного и поступательного движений
Т = |
1 J |
|
w 2 |
+ |
1 m V2 . |
|
2 |
Si |
i |
|
2 i Si |
Пусть имеем механизм, у которого:
-n - число звеньев, совершающих вращательное движение;
-к – число звеньев, совершающих поступательное движение;
-p – число звеньев, совершающих плоскопараллельное движение. Общая кинетическая энергия механизма
n |
J w 2 |
k |
m V2 |
+ |
p |
æ |
J w 2 |
+ |
m V2 ö |
(8.9) |
|||||
Т = å |
2 |
+ å |
2 |
å |
çç |
2 |
i |
2 |
Si |
÷÷ . |
|||||
|
Si i |
|
i Si |
|
|
|
|
|
Si |
|
i |
|
|
||
i= 1 |
|
i= 1 |
|
|
i= 1è |
|
|
|
|
|
ø |
|
|||
Кинетическая энергия приведенной массы при поступательном |
|||||||||||||||
движении звена приведения |
|
|
1 m |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
Т = |
np |
V2 , |
|
|
|
|
|
(8.10) |
||||
|
|
|
|
2 |
|
|
np |
|
|
|
|
|
|
||
где mnp - приведенная масса, кг;
Vnp - скорость звена приведения, м/c.
Приравнивая (8.9) и (8.10) получим выражение для определения приведенной массы в общем виде, кг
n |
w 2 |
k |
V2 |
p |
æ |
|
w 2 |
|
V2 ö |
|
||||
mnp = å JSi |
i |
+ å mi |
Si |
+ å |
ç |
JSi |
i |
+ mi |
Si ÷ . |
(8.11) |
||||
V2 |
V2 |
|||||||||||||
i |
1 |
i |
1 |
V2 |
i |
1 |
ç |
|
|
V2 ÷ |
|
|||
= |
|
np |
= |
|
np |
= |
|
è |
|
np |
|
np ø |
|
|
Наиболее часто за звено приведения принимают ведущее звено, совершающее вращательное движение (кривошип). Тогда вместо понятия «приведенная масса» пользуются понятием «приведенный момент инерции».
Кинетическая энергия звена приведения, совершающего вращательное движение, Нм
Т = |
1 J |
w 2 |
, |
(8.12) |
|
2 |
np np |
|
|
где Jnp - приведенный момент инерции, кгм2;
ω np - угловая скорость звена приведения, 1/с.
Приравнивая (8.9) и (8.12) получим выражение для определения приведенного момента инерции в общем виде, кгм2
n |
w 2 |
k |
V2 |
p |
æ |
w 2 |
V2 |
ö |
(8.13) |
|
Jnp = å JSi |
2 |
+ å mi |
2 |
+ å |
çç JSi |
2 |
+ mi |
2 |
÷÷ . |
|
|
i |
|
Si |
|
|
i |
Si |
|
|
|
i= 1 |
w пр |
i= 1 |
w np |
i= 1 è |
w np |
w np ø |
|
|||
Поскольку линейные и угловые скорости звеньев рычажного механизма будут различны в различных его положениях, то приведенный момент инерции его будет величиной переменной, (варьируемой)
Jnp = Var = Jпр .
По этому признаку рычажные механизмы относятся к механизмам циклического типа.
Так как угловые скорости валов зубчатых колес постоянны, то приведенный момент инерции механизмов передач будет так же постоянный Jпр = const = Jпр0 . По этому признаку механизмы передач относятся к
механизмам ротационного типа.
Приведенный момент инерции всего машинного агрегата
Jпр = Jпр0 + Jпр .
8.3 Приведение сил
Силы и моменты, действующие на звенья механизма, можно условно заменить приведенной силой или приведенным моментом, приложенным к звену приведения.
Мощность всех активных сил и моментов, действующих механизма, Вт
P = ån Fi Vi cos a i + |
ån Miw i , |
i= 1 |
i= 1 |
где Fi и Mi – сила и момент, приложенные к звену i, Н, Нм; Vi – скорость точки приложения силы Fi, м/с;
w i - угловая скорость звена i, 1/с;
a i - угол между направлением силы Fi и скорости Vi.
на звенья
(8.14)
Мощность, развиваемая приведенной силой, если звено приведения совершает поступательное движение
Pnp = Fnp × Vnp, |
(8.15) |
где Fnp - величина приведенной силы, Н;
Vnp - скорость звена приведения, м/с.
Приравнивая (8.14) и (8.15) получим выражение для определения Fпр, Н
n |
|
V |
n |
w |
|
||
Fnp = å |
Fi |
i |
cos a |
i + å Mi |
i |
. |
(8.16) |
V |
V |
||||||
i= 1 |
|
np |
i= 1 |
np |
|
||
Мощность, развиваемая приведенным моментом, если звено |
|||||||
приведения совершает вращательное движение |
|
|
|
||||
|
|
|
Pnp = |
Mnp × w np, |
(8.17) |
||
где Мnp – приведенный момент, Нм;
ω np - угловая скорость звена приведения, 1/с.
Приравнивая (8.14) и (8.17) получим выражение для определения
Мnp, Нм
Mnp = ån Fi |
Vi |
cos a i + ån Mi |
w 1 |
. |
(8.18) |
w np |
|
||||
i= 1 |
i= 1 |
w np |
|
||
В курсовых проектах при определении приведенного к кривошипу момента из всех внешних сил, действующих на звенья рычажного механизма, будем учитывать только силу полезного сопротивления - Fnc (если последнее звено – ползун).
Тогда формула (8.18) примет вид
Mnp = Fnc |
VS5 |
. |
(8.19) |
|
|||
|
w 1 |
|
|
Если последнее звено – коромысло, то на него действует момент полезного сопротивления Мnc . Тогда формула (8.18) будет
Mnp = Mnc × |
ω 5 |
. |
(8.20) |
|
|||
|
w 1 |
|
|
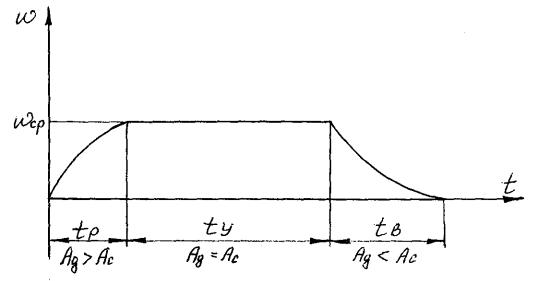
8.4 Режим работы машины
Время работы машинного агрегата – t в общем случае состоит из времени разбега – tр , времени установившегося движения – ty, и времени выбега – tв (останова) (рисунок 8.3). Кинетическая энергия агрегата в различных положениях будет различна, т.к. различна будет угловая скорость.
Изменение кинетической энергии равно сумме работ активных сил, действующих на звенья
Т − То = Ад − Ас , |
(8.21) |
где Т – кинетическая энергия в конечном положении; То – кинетическая энергия в начальном положении; Ад – работа движущих сил; Ас – работа сил сопротивления движению.
При разбеге угловая скорость начального звена в конечном положении больше, чем в начальном ω > ω o .
Тогда
|
|
J |
пр |
ω 2 |
|
J |
пр |
ω 2 |
|
T − T |
= |
|
|
− |
|
o |
> 0 , |
||
|
|
|
|
|
|
||||
o |
|
|
2 |
|
|
2 |
|
||
или |
|
|
|
|
|
||||
|
Ад > |
Ac . |
|
|
|
||||
|
|
|
|
|
|||||
Рисунок 8.3