


рекомендуемое из конструктивных соображений.
Из двух значений rрол в качестве верхней границы величины радиуса
ролика должна быть выбрана меньшая. |
|
|
|
|
||
Радиус кривизны профиля - ρ |
может быть найден по известной |
|||||
формуле для кривизны плоской линии, |
заданной |
параметрическими |
||||
уравнениями XA1 = XA1 (ϕ ) , YA1 |
= YA1 (ϕ ). |
32 |
|
|
||
|
|
¢ 2 |
¢ 2 |
|
|
|
r = |
(XA1 + |
YA1 ) |
|
, |
|
|
¢ |
¢¢ |
¢ |
¢¢ |
|
||
|
|
|
||||
|
YA1 |
XA1 |
- XA1 |
YA1 |
|
|
где штрихами обозначены производные по переменной φ.
Формула для определения радиуса кривизны теоретического профиля кулачка с поступательно движущимся роликовым толкателем
r = |
[S¢ sin a - esin a |
+ (S0 + |
S) × cos a ]2 |
(2S¢ - e)sin a + |
(S0 + S - |
S¢¢ ) × cos a . |
Формула для определения радиуса кривизны теоретического профиля кулачка с вращающимся роликовым коромыслом
r = |
[( 2 + |
S¢)sin a + 0 sin(y 0 + y - |
a )]2 |
|
|
|
|
. |
|
( 2 + S¢)2 |
sin a - S¢¢ cos a + 0 × sin(y |
0 + y - a ) |
||
При выборе радиуса ролика по формуле rрол ≤ 0,8 ρmin величина ρmin вычисляется для выпуклого участка центрального профиля кулачка в зоне
его наибольшей кривизны.
7.2.5 Построение конструктивного профиля кулачка
Кулачковые механизмы роликовым толкателем
Выражения для определения координат конструктивного профиля кулачка с роликовым толкателем найдем из условия, что положение нормали N-N в точке контакта – К известно (рисунок 7.15в), т.е. известен угол давления
a = arctg |
S′ − |
e |
|
|
|
. |
|
S0 + |
Si |
||
Вектор координат точки в неподвижной системе координат
|
XK0 |
|
|
|
|
|
|
|
XA0 |
+ |
rрол sin a |
|
|
|
|
|
|
|
e + |
rрол × sin a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
rK0 = |
YK0 |
|
|
|
= |
|
|
|
YA0 |
- |
rрол cos a |
|
|
|
= |
|
|
|
(S0 + |
S) × rрол × cos a |
|
|
|
. |
|
1 |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
Матрица перехода к повернутым осям

|
cos j |
sin j |
0 |
|
|
|
|
|
|
|
|||||
M10 = |
- sin j |
cos j |
0 |
|
|
|
. |
|
0 |
0 |
1 |
|
|
|
|
Вектор координат в подвижной системе координат
|
|
|
|
XK1 |
|
|
|
|
|
rрол × sin(a - |
j ) + e × cos j |
+ |
(S + |
S0 ) × sin j |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
rK1 |
= M10 × rK0 |
= |
YK1 |
|
|
|
|
= |
- rрол × cos(a |
- |
j ) - |
e × sin j |
+ |
(S + S0 ) × cos j |
|
|
|
. |
|
||||||||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
||
Текущий радиус вектор |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
X2 |
+ Y2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|||||||||||
r = |
= |
|
r2 |
+ |
e2 + (S |
0 |
+ S)2 |
+ 2r |
|
[е × sin a - |
(S + S |
0 |
)cos a ] |
||||||||||||||
ϕ |
K1 |
K1 |
|
|
рол |
|
|
|
|
рол |
|
|
|
|
|
|
|
|
|
|
|||||||
Текущий угол профиля кулачка
tg b = XK1 ,
YK1
откуда после преобразований имеем
b = j + arctg |
e + |
|
rрол × sin a |
||
|
|
|
|
. |
|
(S + S |
0 |
) + r |
× cos a |
||
|
|
рол |
|
|
|
Кулачковый механизм с роликовым коромыслом
Для определения координат конструктивного профиля через точку А проведем вторую подвижную систему координат X2Y2 (рисунок 7.16) так, чтобы ось проходила через точку О2. Через точку контакта – К проведем нормаль к профилю N-N, считая, что угол давления известен
|
a = arctg |
( 2 + S′) - |
0 × (y 0 + y ) |
. |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
0 × sin(y |
0 + y ) |
||||||||||||||||||
Координаты точки касания К ко второй системе координат |
||||||||||||||||||||||
|
|
XK2 |
|
|
|
|
|
|
|
|
rрол × sin a |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|||||||||||||||
|
rK2 = |
YK2 |
|
|
|
|
= |
|
|
|
- |
rрол × cos a |
|
|
|
. |
|
|
|
|
||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
Матрица преобразования от подвижной системы координат к |
||||||||||||||||||||||
неподвижной |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cos(y 0 + y ) |
- sin(y 0 + |
y ) |
2 - 2 cos(y 0 + y ) |
|
|
|
|
||||||||||||||
|
|
|
||||||||||||||||||||
M02 = |
sin(y 0 + y ) |
cos(y 0 + |
y ) |
2 sin(y 0 + y ) |
|
|
|
. |
||||||||||||||
|
0 |
|
0 |
|
|
|
|
|
1 |
|
|
|
|
|||||||||
Вектор координат конструктивного профиля в 1 подвижной системе
rK1 = M10 × M02 × rK2 = M12 × rK2 ,
где М10 - матрица перехода от неподвижной системы к 1 подвижной;
М12 =М10 . М02 – матрица преобразования координат от системы 2 к системе 1.
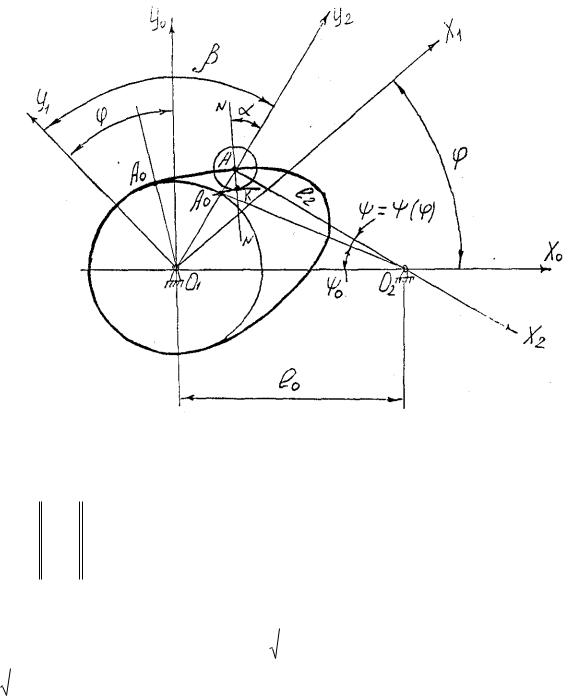
Рисунок 7.16
После перемножения и преобразования получим
XK1
rK1 = YK1
1
|
0 × cos j |
- |
2 × cos(j |
+ |
y |
0 + |
y ) - |
rрол × sin(j |
+ |
y |
0 + |
y |
- |
a ) |
|
|
|
|
|
|
|
||||||||||||||||
= |
- 0 × sin j |
- |
2 × sin(j |
+ |
y |
0 + |
y ) - |
rрол × cos(j |
+ |
y |
0 + |
y |
- |
a ) |
|
|
|
. |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
Текущий радиус-вектор
|
|
|
|
|
|
|
|
|
|
r |
= |
|
X |
2 |
+ |
Y2 |
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ϕ |
|
|
|
|
K1 |
|
K1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
||||||
= |
2 |
+ |
2 |
+ |
r2 |
+ 2[r |
|
× |
2 |
× sin a |
+ |
r |
|
× |
0 |
× sin(y + y |
0 |
- a ) + |
|
0 |
× |
2 |
× cos(y |
0 |
+ y )] |
|||||||
0 |
|
2 |
|
рол |
рол |
|
|
|
рол |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Текущий угол профиля кулачка |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
b |
|
= j + |
arctg |
0 - |
2 × cos(y |
0 + y ) - |
rрол × sin(y |
0 + |
y |
|
- |
a ) |
. |
|
|
|
|||||||||||||
|
|
|
|
|
- sin(y |
0 + |
y ) - |
rрол × cos(y |
0 + |
y |
- |
a ) |
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
Кулачковый механизм с плоским толкателем
Неподвижную систему координат проводим таким образом, чтобы ось Y0 была параллельна оси толкателя (рисунок 7.17).
Вектор координат точки К в неподвижной системе
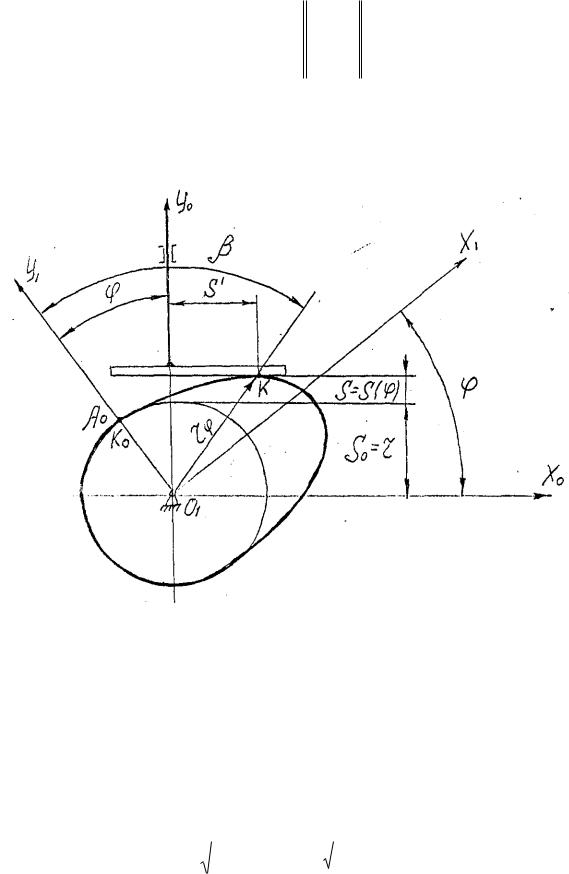
S′
rK0 = S0 + S .
1
Матрица преобразования неподвижной системы в подвижную
|
cos ϕ |
sin ϕ |
0 |
|
|
|
|
|
|
|
|||||
M10 = |
- sin j |
cos j |
0 |
|
|
|
. |
|
0 |
0 |
1 |
|
|
|
|
Рисунок 7.17
Вектор координат конструктивного профиля в подвижной системе
|
|
XK1 |
|
|
S′ × cos j |
+ |
(S0 + |
S) × sin j |
|
|
|||
|
|
|
|
|
|||||||||
rK1 = M10 × rK0 = |
YK1 |
= |
- |
S¢ × sin j |
+ |
(S0 + |
S) × cos j |
|
. |
||||
|
|
1 |
|
|
|
|
|
|
1 |
|
|
|
|
Текущий радиус-вектор |
|
|
|
|
|
|
|
|
|
|
|
|
|
r = |
X2 |
+ Y2 |
= |
|
S¢ 2 + (S |
0 |
+ S)2 |
. |
|||||
ϕ |
K1 |
K1 |
|
|
|
|
|
|
|
|
|
||
Текущий угол профиля кулачка