

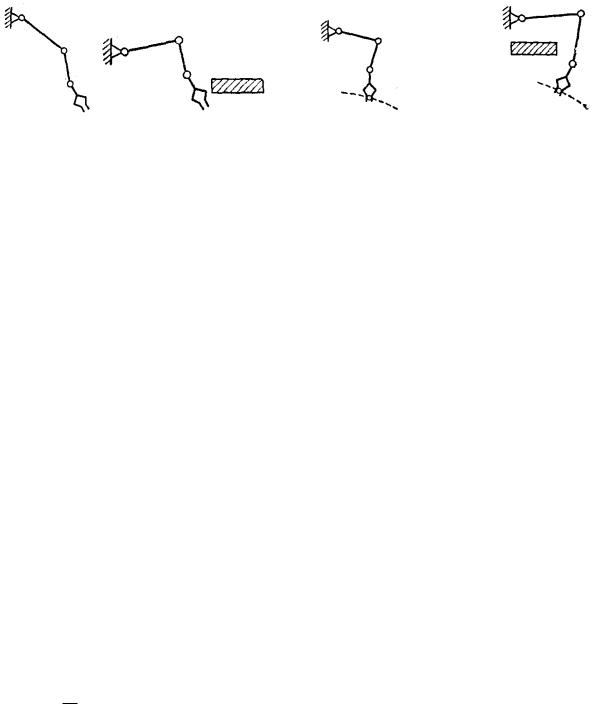
Кпервому классу относится движение в свободном рабочем объеме (рисунок 11.7в).
Ко второму – движение в несвободном пространстве, при котором часть рабочего объема занята некоторым твердым телом (рисунок 11.7б).
Ктретьему классу относятся движения, при которых точка захвата перемещается по заданной плоской или пространственной кривой (рисунок 11.7).
а) |
б) |
в) |
г) |
Рисунок 11.7
К четвертому классу относятся движения, совершаемые в несвободном пространстве при несвободном объекте манипулирования (рисунок 11.7г).
11.3 Кинематика манипуляторов
При кинематическом анализе пространственных механизмов пользуются методом преобразования координат с использованием матриц
(см. п.2.2.5.2). |
|
Этот метод |
удобен при кинематическом исследовании |
пространственных механизмов с несколькими степенями свободы при
использовании ЭВМ, так как позволяет |
формализовать процесс составления |
||||||||||||
функций положения, передаточных функций и сокращает запись. |
|||||||||||||
Для механизма с W степенями |
подвижности вектор координат точки |
||||||||||||
К, принадлежащей n-му звену, определяется из выражения |
|||||||||||||
|
|
|
|
rок = Mоn rnк = Пк (q1 , q2 , ,qw ) , |
|||||||||
где |
|
к (q1 , q2 , ,qw ) |
- функция положения точки К механизма по |
||||||||||
П |
|||||||||||||
обобщенным координатам. |
|
|
|
|
|
|
|
|
|
||||
Скорость точки К определяется из выражения |
|||||||||||||
|
|
|
|
|
|
w |
∂ |
|
к |
|
w |
|
|
|
|
|
|
|
|
П |
|
||||||
|
|
|
|
|
|
||||||||
|
|
Vок = rок = Mon rnк = |
å |
∂ q |
i |
qi = |
å П′i,кqi , |
||||||
|
|
|
|
|
|
i= 1 |
|
i= 1 |
|||||
|
|
|
|
|
|
|
|
|
|||||
где П′i,к - первая передаточная функция по i–ой обобщенной координате;
qi - обобщенная скорость по i-ой обобщенной координате;
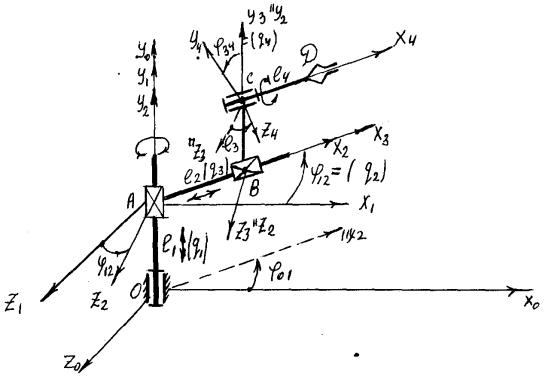
Систему координат S2 жестко связываем со звеном 2, вращающегося вокруг оси О1Y в горизонтальной плоскости X1Z1. Положение звена 2 в системе координат S1 определяется углом поворота φ12 (q2). Систему координат S3 связываем со звеном 3, т.е. переносим параллельно системе S2
на расстояние 2 вдоль оси Х. Положение системы S3 в системе S2 задается расстоянием 2 вдоль оси АХ2 (q3) (начало координат в точке В).
Систему координат S4 жестко связываем со звеном 4, которое вращается относительно оси Х4 в плоскости Y3Z3 начало координат S4 перемещаем в точку С.
Положение S4 системы в системе S3 определяется расстоянием вдоль оси Y3 - 3 и углом поворота φ34 (q4).
Положение системы S4 в неподвижной системе координат можно выразить через обобщенные координаты (независимые координаты).
1 = q1 , |
ϕ 12 = q2 , 2 = q3 , ϕ 34 = q4 . |
||
Координаты точки Д в системе S4 определяются |
4 |
|
|
|
|
|
|
X4 = 4 , |
Y4 = 0, Z4 = 0 или r4д = |
0 |
. |
|
|
0 |
|
|
|
1 |
|
Положение точки Д четвертого звена в неподвижной системе
координат S0 определяется матричным выражением |
|
r0Д = M04r4Д , |
(11.1) |
где r0Д - вектор координат точки Д в системе координат S0;
M04 - матрица преобразований от системы S3 к системе S0,
составленная |
как |
произведение |
матриц |
последовательных |
промежуточных переходов. |
|
|
||
|
|
M04 = M01M12M23M34 . |
(11.2) |
|
Матрицы промежуточных преобразований
|
|
|
cos ϕ 12 |
0 |
− sin ϕ 12 |
0 |
|
|
|
|
|
|
|
|
|||||
M02 |
= M01M12 |
= |
0 |
1 |
0 |
1 |
|
|
. |
sin ϕ 12 |
0 |
cos ϕ 12 |
0 |
|
|
||||
|
|
|
|
|
|
||||
|
|
|
0 |
0 |
0 |
1 |
|
|
|