


На рисунке 5.13 для получения допускаемого угла давления αдоп надо центр О1 поместить на пересечении окружности m с линией , проведенной
под углом 90О - αдоп к отрезку В1О2 из точки В1 (при ψ max < θ ). При таком способе выбора центра О1 угол давления на участке рабочего хода φр всегда меньше допускаемого. На участке холостого хода φх угол давления будет немного больше φдоп, т.к. минимальное значение угла 90О - αдоп достигается в положении, когда направление кривошипа О1А совпадает с направлением стойки. Однако, холостой ход менее нагружен и наибольшее отступление от
величины Vдоп |
допустимо. Обозначим расстояние от центра О1 |
до В1 и В |
||||||||||||
соответственно через |
' |
и . Тогда длина кривошипа |
|
1 и длина шатуна |
|
2 |
||||||||
|
|
|
′′ |
|
|
|
|
|
|
|
|
|
|
|
определяются из соотношений: |
|
′ = 2 − |
1 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
||||
отсюда 2 = |
0,5( '− ′′) |
|
|
′′ = |
2 + |
1 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
||||
1 = |
0,5( ′′ − |
′) |
|
|
|
|
|
|
|
|
|
|
|
|
Расстояние ′ и ′′ находят из равнобедренных треугольников О1ОВ1 и |
||||||||||||||
О1ОВ2 |
|
′ = |
2r sin(Vдоп − |
0,5ψ max ) |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
||||||||
|
|
′′ = |
2r sin(Vдоп − |
0,5ψ max + θ ) |
|
|
|
|
|
|||||
где r - радиус окружности |
m, определяемый из треугольника ОВ1В2 по |
|||||||||||||
известной длине коромысла 3 |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
r = |
3 |
|
sin 0,5ψ max |
|
|
|
|
|
||
|
|
|
|
sin |
θ |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Длина стойки d находится из О1О2В
d = 
 ( 1 + 2 )2 + 23 − 2 3 ( 1 + 2 )sin Vдоп
( 1 + 2 )2 + 23 − 2 3 ( 1 + 2 )sin Vдоп
Аналогично решаются задачи синтеза по положениям звеньев для других четырехзвенных плоских механизмов.
6 Синтез планетарных механизмов
Планетарные передачи, в отличии от зубчатых механизмов с неподвижными осями колес обеспечивают более широкий диапазон передаточных отношений при меньших габаритах и массах. Наряду с этим возможности установки в каждой передаче нескольких сателлитов позволяют уменьшить нагрузки на опоры центральных колес и передавать большую мощность.

Основной задачей синтеза планетарной передачи является воспроизведение заданного передаточного отношения, что в конечном счете предусматривает определение чисел зубьев колес. При решении этой задачи необходимо учитывать ограничения, которые накладываются на выбор чисел зубьев и числа сателлитов, так как они связаны между собой определенными соотношениями.
Условия подбора:
а) условие передаточного отношения; б) условие соосности; в) условие сборки; г) условие соседства.
Схема на рисунке 3.23б.
Условие передаточного отношения: должно быть равно требуемому передаточному отношению
iпл = i13H = 1 − i13H = 1 − (− z3 / z1 ) = 1 + (z3 / z1 ) = uпл .
Условие соосности заключается в равенстве межосевых расстояний 2-х передач
aW = (d1 + d2 ) / 2 = (d3 − d2 ) / 2
или
z1 + z2 = z3 − z2 .
Условие сборки.
В планетарных редукторах применяется К сателлитов. Редуктор должен быть симметричен. Симметричным называется редуктор, где сателлиты расположены по окружности равномерно. Сателлиты 2
расположены под одним и тем же углом - 2Kπ (рисунок 6.1)
Симметричный редуктор проще в изготовлении, не дает радиальной нагрузки на валы центральных шестерен.
Недостаток – трудность сборки.
Условие сборки заключается в попадании зубьев сателлитов во впадины зубчатых колес 1 и 2 (рисунок 6.1)
После установки первого сателлита зубья колеса 1 будут занимать определенное положение относительно зубьев колеса 3. При установке второго сателлита может оказаться, что его зубья, направленные во впадины одного центрального колеса 1, не попадают во впадины другого 3 и таким образом, этот сателлит нельзя ввести одновременно в зацеплении с центральными колесами 1 и 3.
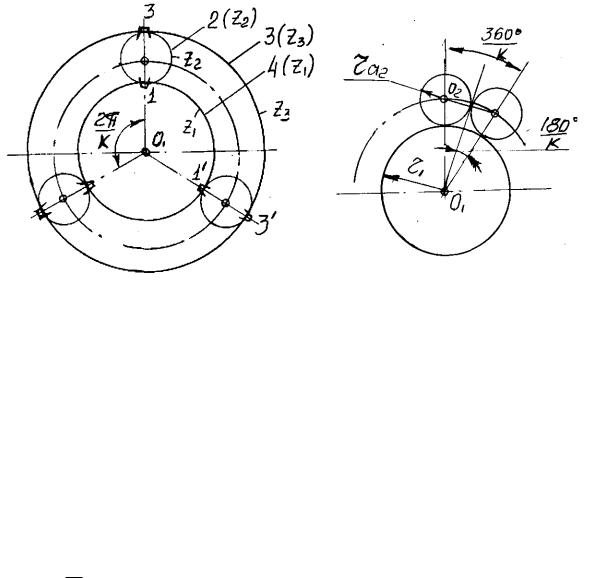
Рисунок 6.1 |
Рисунок 6.2 |
Чтобы осуществить симметричное расположение сателлитов при заданном их числе К, необходимо выполнить определенное соотношение между числами зубьев z1 и z3 колес 1 и 3.
Дуга колеса – 1 в пределах угла 2π / K равна
11/ = pz1 / K = pв1 + a1, a1 á p .
Дуга колеса – 3
33/ = pz3 / K = pв3 + a3 , a3 á p ,
где в1 и в3 – целые числа, а1 и а3 – отрезки, каждый из которых по величине меньше шага – р. Складывая почленно выражения для дуг, получим
Kp (z1 + z3 ) = p(в1 + в3 ) + (а1 + а3 ) = p(в1 + в3 + 1) = pС,
где а1 + а2 = р; (в1 + в3 + 1) = С – целое число.
Так как левая часть этого равенства должна быть целым числом, то и правая часть тоже должна быть числом при любом К. Это возможно, если
а1 + а3 = p . Сокращая на р1 имеем |
z1 + z3 |
= С . |
|
К |
|||
|
|
Таким образом, сумма чисел зубьев центральных колес должна быть кратна числу сателлитов.
Условие соседства заключается в том, чтобы сателлиты не задевали друг друга, т.е. расстояние между осями соседних сателлитов было больше диаметра окружности вершин зубьев сателлита (рисунок 6.2).
(r |
+ r |
2 |
) sin 180 |
0 / K > r |
|||
1 |
|
|
|
|
|
a2 |
|
m(z1 + |
z2 ) sin 1800 / K > m(z2 + 2) |
||||||
sin 1800 / K > |
|
z2 + |
2 |
|
|||
|
z1 + |
z2 |
|||||
|
|
|
|
|
|||
Определение чисел зубьев Сопоставляя уравнения передаточного отношения, соосности и сборки
(без условия соседства) имеем:
uпл = u13H = (z1 + z3 ) / z1 → z3 = z1u13H − z1 = z1 (u13H − 1)
z1 + z2 = z3 − z2 → z2 = (z3 − z1 )2 = (z1u13H − 2z1 ) / 2 = z1 (u13H − 2) / 2 (z1 + z3 ) / K = C = z1u13H / K
Совмещая уравнения, получим:
z1 : z2 : z3 : C = 1: (u13H − 2) / 2 : (u13H − 1) : u13H / K .
Пример - Определить числа зубьев z1, z2, z3 планетарного механизма с uпл = 4 (рисунок 3.23б).
Примем число сателлитов К = 4
|
z1 : z2 : z3 |
: C = 1 : |
u1H3 − 2 |
: (u1H3 − 1) : |
u1H3 |
|
||||||
|
|
K |
||||||||||
|
|
|
4 − 2 |
2 |
4 |
|
|
|||||
z1 : z2 |
: z3 |
: C = 1: |
: (4 − 1) : |
= 1:1: 3 :1 = 17 :17 : 51:17 |
||||||||
|
4 |
|||||||||||
|
|
|
|
2 |
|
|
|
|
|
|
||
(при zmin ³ 17).
Проверка условий. Условие соосности
z1 + z2 =z3 - z2, 17 + 17 = 51 - 17, 34 = 34.
Условие сборки
z1 + z2 = K × С, 17 + 51 = 4 х 17, 68 = 68.
Условие соседства
(z1 + z2 )Sin 180K − z2 > 2 , (17 + 17)Sin180/4 – 17 > 2, 12 > 2.
3 |
|
|
|
z3 |
|
51 |
|
|
|
Передаточное отношение uпл = u1H |
= |
1 |
+ |
|
= 1 + |
|
= |
4 . |
|
z1 |
17 |
||||||||
|
|
|
|
|
|
|
Кроме схемы на рисунок 3.23б наиболее часто применяют еще 4 схемы (рисунок 6.3).

а) |
б) |
|
в) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
г) |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 6.3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Формулы для подбора чисел зубьев |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
Рисунок 6.3а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1)u13H |
|
|
|
1)(u13H − 1) |
|
||||||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e + |
1 |
|
|
|
|
|
|
|
e(e + |
|
|
e(e + |
|
|||||||||||||
z1 : z2 : z2 |
|
: z3 : C = e :1: |
|
|
|
|
|
|
|
|
|
|
|
: |
|
|
|
|
|
|
|
: |
|
|
|
|
|
|
, |
|||||||||||||
− |
|
(eu13H + 1) |
|
(eu13H + 1) |
(eu13H |
+ 1)K |
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где e = |
z1 |
,eопт |
= |
1 + |
|
1 + |
|
|
u13H |
|
|
,u13H = 1 − |
u1H3 . |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
u13H |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
z2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Рисунок 6.3б, в |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1)u13H |
|
|
|
1)(u13H − |
|
|
|
|
||||||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
e + |
1 |
|
|
|
|
|
e(e + |
|
e(e + |
1) |
|
|
|
|||||||||||||
z1 : z2 : z |
2 |
|
: z3 |
: C = e :1: |
|
|
|
|
|
|
|
: |
|
|
|
|
|
|
: |
|
|
|
|
|
|
, |
|
|||||||||||||||
(eu13H |
+ |
1) |
|
|
(eu13H |
+ 1) |
|
|
(eu13H + |
1)K |
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
где eопт = |
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
u13H |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 6.3г |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e(e − 1)u13H |
|
|
|
1)(u13H − |
|
|
|
|
|||||||||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
e − |
1 |
|
|
|
|
|
|
e(e − |
1) |
|
|
|
||||||||||||||
z1 : z2 : z |
2 |
: z3 |
: C = e :1: |
|
|
|
|
|
|
|
: |
|
|
|
|
|
|
: |
|
|
|
|
|
|
, |
|
||||||||||||||||
(eu13H |
|
− |
|
|
|
(eu13H |
|
|
|
(eu13H − |
1)K |
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1) |
|
|
|
|
|
− 1) |
|
|
|
|
|
|
||||||||||||||
где еопт = 3.