

3.6 Основные параметры зубчатой пары
В зависимости от величин смещения каждого колеса, ± x1m,± x2m ,
можно получить три типа передач, отличающихся расположением начальных и делительных окружностей:
а) нулевая передача.
Передача будет нулевой, если суммарный коэффициент смещения передачи xå = x1 + x2 = 0 (т.е. х1=0 и х2=0).
Если х1>0, а х2<0, но x1 = x2 - т.е. положительное смещение одного
колеса равно по абсолютной величине отрицательному смещению другого колеса – то передача называется равносмещенной.
В нулевой передаче по делительной окружности толщина зуба одного колеса равна ширине впадины другого
s1 = |
е2 |
, |
s2 = |
е1 |
, |
тогда делительные окружности и начальные совпадают (рисунок 3.11а). Межосевое расстояние по делительным и начальным окружностям – одинаковы.
|
|
d1 |
= dW |
1 |
= mz1 , |
||||
|
|
d2 |
= dW |
= mz2 , |
|||||
|
|
2 |
|||||||
|
|
|
|
|
|
dW 1 + dW 2 |
|
||
а = а |
W |
= |
d1 + d2 |
|
= |
. |
|||
|
|
||||||||
|
|
|
2 |
|
|
2 |
|
||
Угол зацепления равен углу профиля исходного контура (рейки)
α W = α = 200 ;
б) если xå = x1 + x2 > 0 - положительная передача. Положительная
передача получается, если оба колеса – положительные, или если одно колесо положительное, а другое нулевое или отрицательное со смещением
– х2, которое по абсолютной величине меньше положительного смещения
другого колеса + x1 > − x2 .
В положительной передаче по делительным окружностям толщина зуба одного колеса больше ширины впадины другого s1 > e2 . Следовательно, делительные окружности не могут быть начальными и оси колес надо раздвинуть dW > d . При этом межосевое расстояние увеличивается aW > a и соответственно увеличивается угол зацепления, т.к. основные окружности не изменяются α W > α (рисунок 3.11б);
в) если xå = x1 + x2 < 0 - отрицательная передача. Получается если оба
колеса отрицательные или если одно колесо отрицательное, а другое – нулевое или положительное со смещением, которое меньше по абсолютной
величине отрицательного смещения + x1 < − x2 .
Рисунок 3.11
В отрицательное передаче по делительным окружностям толщина зуба одного колеса меньше ширины впадины другого s1 < е2. Для получения зацепления без бокового зазора межосевое расстояние должно быть
уменьшено aW < a, и соответственно, уменьшается угол зацепления α W < α (рисунок 3.11в).
Угол зацепления α w определяется:
а) через invα w , invαw = invα + |
2(x1 + x2 ) |
tgα , |
|
|
|
|
|
|
|
||
где invα = inv200 = 0,0149 . |
z1 + z2 |
|
|
|
|
|
|
|
|
|
|
После вычисления invα w по таблицам инвалют находится угол α w ; |
|||||
б) по специальным номограммам по значению |
1000x |
å |
, (рисунок 3.12), |
||
zå |
|
||||
|
|
|
|
|
|
где xå = x1 + x2 , х1 и х2 выбираются по таблицам 3.1 и 3.2 в зависимости от z1 и z2.
Таблица 3.1 - Значения коэффициента х1 для неравно смещенного внешнего зацепления при 5 ³ i1,2 > 2
z1 |
|
11 |
12 |
13 |
14 |
15 |
16 |
17 |
18 |
19 |
20 |
x1 |
|
0,66 |
0,73 |
0,80 |
0,80 |
0,92 |
0,96 |
1,04 |
1,10 |
1,16 |
1,22 |
|
Таблица 3.2 - Значения коэффициента х2 |
для неравно смещенного |
|||||||||
внешнего зацепления при 5 ³ i1,2 > 2 |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|||
z2 |
|
|
|
|
Значение x2 при z1 |
|
|
|
|||
|
|
11 |
12 |
13 |
14 |
15 |
16 |
17 |
18 |
19 |
20 |
25 |
|
0,442 |
0,425 |
- |
- |
- |
- |
- |
- |
- |
- |
30 |
|
0,501 |
0,486 |
0,471 |
0,463 |
- |
- |
- |
- |
- |
- |
35 |
|
0,556 |
0,542 |
0,528 |
0,522 |
0,518 |
0,512 |
0,505 |
- |
- |
- |
40 |
|
0,610 |
0,596 |
0,582 |
0,577 |
0,575 |
0,569 |
0,564 |
0,560 |
0,553 |
- |
45 |
|
0,661 |
0,648 |
0,635 |
0,632 |
0,628 |
0,624 |
0,620 |
0,616 |
0,611 |
0,606 |
50 |
|
0,709 |
0,696 |
0,685 |
0,684 |
0,682 |
0,677 |
0,674 |
0,671 |
0,667 |
0,662 |
55 |
|
0,754 |
0,745 |
0,734 |
0,732 |
0,731 |
0,726 |
0,727 |
0,722 |
0,720 |
0,716 |
60 |
|
- |
0,789 |
0,782 |
0,780 |
0,779 |
0,778 |
0,777 |
0,773 |
0,772 |
0,769 |
65 |
|
- |
- |
0,822 |
0,825 |
0,826 |
0,827 |
0,825 |
0,823 |
0,821 |
0,820 |
70 |
|
- |
- |
- |
0,866 |
0,870 |
0,872 |
0,874 |
0,871 |
0,869 |
0,868 |
75 |
|
- |
- |
- |
- |
0,909 |
0,914 |
0,917 |
0,920 |
0,919 |
0,916 |
80 |
|
- |
- |
- |
- |
- |
0,954 |
0,957 |
0,961 |
0,962 |
0,965 |
85 |
|
- |
- |
- |
- |
- |
- |
0,998 |
1,001 |
1,003 |
1,008 |
90 |
|
- |
- |
- |
- |
- |
- |
- |
1,042 |
1,046 |
1,048 |
95 |
|
- |
- |
- |
- |
- |
- |
- |
- |
1,086 |
1,088 |
100 |
|
- |
- |
- |
- |
- |
- |
- |
- |
- |
1,129 |
Основные параметры любой зубчатой пары (с учетом коэффициента смещения ± x1 ,± x2 ) определяется по формулам:
Диаметры делительных окружностей, мм
|
d1 = mz1 , |
d2 = mz2 . |
|
|
|
|
|
||||||||
Диаметры основных окружностей, мм |
|
|
|
|
|
|
|
||||||||
dв1 = |
d1 cos α w , |
dв2 = |
|
d2 cos α w . |
|
|
|
||||||||
Диаметры начальных окружностей, мм |
|
|
|
|
|
|
|||||||||
dw1 |
= |
dв |
, |
dw2 |
= |
dв |
. |
|
|
||||||
|
1 |
|
2 |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
cos α w |
|
|
|
|
cos α w |
|
|
|
|
||
Подставляя dв 1 = |
d1 cos α |
и dв 2 |
= d2 cos α |
имеем |
|||||||||||
dw |
|
= d1 |
cos α |
, dw |
|
= d2 |
cos α |
. |
|||||||
|
cos α w |
|
|
||||||||||||
|
|
1 |
|
|
|
2 |
|
|
cos α |
w |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
знака
(3.4)
(3.5)
(3.6)
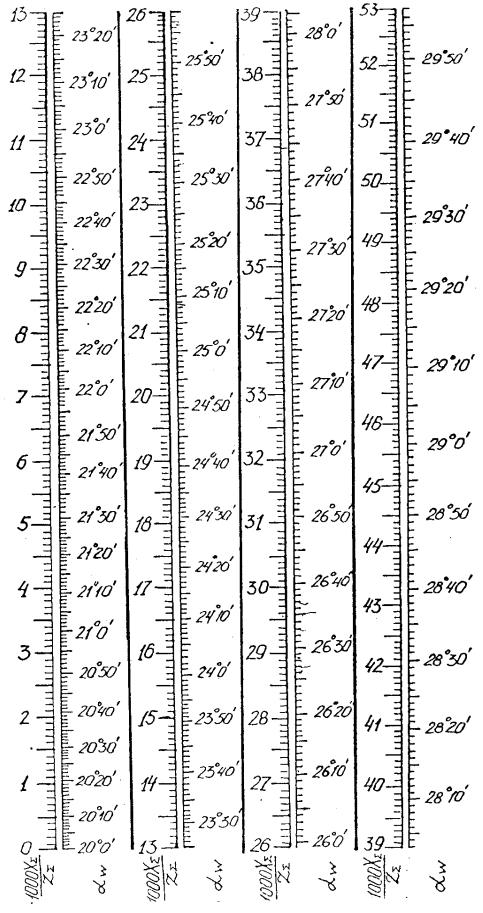
Рисунок 3.12