

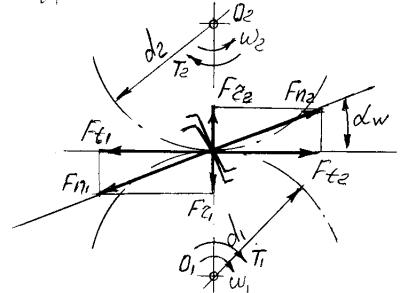
Рисунок 3.27
Fn2 - сила нормального давления 1-го колеса на 2-е;
Fn1 - сила сопротивления, действующая со стороны 2-го колеса на первое.
Силами трения в зацеплении пренебрегают, т.е. они очень малы.
Для расчета зубьев, валов и опор силы нормального давления Fn раскладывают на составляющие - окружные Ft и радиальные Fr.
|
F |
= |
F |
= |
2T1 |
= |
2T2 |
, |
|||
|
|
|
|
|
|||||||
|
t1 |
|
t2 |
|
d1 |
|
d2 |
||||
|
|
|
|
|
|
||||||
|
Fr |
= Fr = Ft tga |
w , |
||||||||
|
|
1 |
|
2 |
|
|
|
|
|
|
|
|
Fn1 |
= Fn2 |
= |
|
Ft |
|
, |
|
|||
|
cos a |
|
|
||||||||
|
|
|
|
|
|
w |
|||||
где α w - угол зацепления; |
T2 = |
T1u12 × h , |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
||
u12 |
= z2 / z1 - передаточное число; |
|
|
|
|
|
|
||||
η = |
0,96...0,97 - к.п.д. передачи. |
|
|
|
|
|
|
|
|||
4 Анализ кулачковых механизмов
4.1 Общие сведения
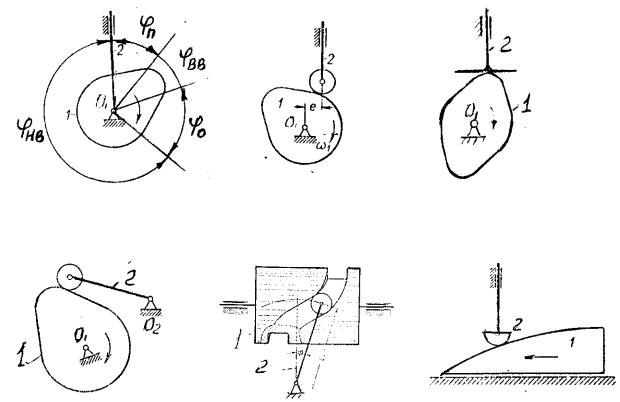
Кулачковым называется механизм, в состав которого входит кулачок, т.е. звено с рабочей поверхностью переменной кривизны. Совокупность кривых, очерчивающих рабочую поверхность носит название профиля кулачка (рисунок 4.1).
а) |
б) |
в) |
г) д) е)
Рисунок 4.1
Механизмы предназначены для преобразования вращательного движения кулачка – 1 в возвратно-поступательное движение толкателя – 2 (рисунок 4.1а,б,в,е) или возвратно-вращательное движение коромысла (рисунок 4.1г,д) с выстоем последних заданной продолжительности. Кулачок может совершать и поступательное движение (рисунок 4.1е).
Угол поворота кулачка, соответствующий подъему толкателя из нижнего положения в верхнее, называется углом (фазой) подъема - ϕ n . Угол поворота кулачка, соответствующий выстою толкателю в верхнем положении называется углом (фазой) верхнего выстоя - ϕ BB . Фаза опускания - ϕ O , фаза нижнего выстоя - ϕ HB . Если ось толкателя проходит через ось
вращения кулачка (рисунок 4.1а), то механизм называется центральным. Если нет – то со смещенным толкателем. Величина смещения е называется эксцентриситетом (рисунок 4.1б,в).
Кулачковые механизмы дают возможность легко воспроизводить любую необходимую функцию движения ведомого звена от угла поворота кулачка S = S(ϕ ), путем соответствующего очертания профиля. Благодаря этому кулачковые механизмы получили широкое распространение в различных машинах и приборах и особенно в машинах – автоматах.
Производная от перемещения S(ϕ ) по углу поворота кулачка ϕ называется аналогом скорости

dS(ϕ ) = S′ dϕ .
Аналог ускорения
S¢¢ = dS¢/dj = dS2(j )/d2j .
Скорость и ускорение выходного звена через соответствующие аналоги определяются формулами
V = dS(j )/dt =
a = V/dt = S¢ω/dt =
= S¢(j ) × dj × ω + dj dt
dS(ϕ ) |
dϕ |
|
|
¢ |
|
|
dj |
× dt |
|
= |
S ω, |
|
|
¢ |
|
|
|
¢ |
dω |
|
S (j ) |
ω + |
|
= |
|||
dt |
S (j ) dt |
|||||
¢ |
ε = |
¢¢ |
|
2 |
¢ |
|
S |
S ω |
|
+ S ε. |
|
||
При ω = const,ε = 0,a = S′′ω2 . Достоинства:
-возможность осуществления любого принципиально точного закона движения толкателя;
-наименьшее количество звеньев;
-простота конструкции и синтеза.
Недостатки:
-сложность изготовления (пространственные кулачки);
-повышенный износ элементов.
Классификация кулачковых механизмов: а) по виду движения звеньев:
1плоские (движение кулачка и толкателя в одной или параллельных плоскостях) (рисунок 4.1а,б,в,г,е);
2пространственные (рисунок 4.1д);
2б) по виду движения ведомого звена:
1)возвратно-поступательные (толкатель) (рисунок 4.1а,б,в,е);
2)возвратно-вращательное (коромысло) (рисунок 4.1г,д);
3)сложное плоско-параллельное;
1.в) по виду движения ведущего звена:
1)с вращающимся кулачком (рисунок 4.1а,б,в,г,д);
2)с поступательно движущимся кулачком (рисунок 4.1е);
2.г) по форме рабочей части ведомого звена:
1)с заостренным толкателем (рисунок 4.1а);
2)с роликовым толкателем (рисунок 4.1б,г);
3)с тарельчатым толкателем (рисунок 4.1в);
4)с грибовидным толкателем (рисунок 4.1е);
3.д) по способу замыкания высшей кинематической пары:
1)открытые (силовое замыкание);
2)закрытые (при геометрическом замыкании);

4.е) по синхронности движений:
1)однократные (за один цикл кулачка ведомого звено совершает тоже 1 цикл);
2)многократные (за один цикл кулачка ведомого звено совершает несколько циклов, например двухкратный рисунок 4.1в).
4.2Силовой анализ
Силовой анализ кулачковых механизмов заключается в определении сил, действующих на звенья механизма и коэффициента полезного действия. Движущая сила Fдв., действующая со стороны кулачка на толкатель всегда
совпадает с |
нормалью |
NN к профилю |
кулачка в |
точке их контакта |
(рисунок 4.2). |
|
|
|
|
Вектор этой силы и вектор скорости |
толкателя составляют угол α , |
|||
который называется углом давления, а угол γ = 900 − α |
называется углом |
|||
передачи. |
|
|
|
|
Движение |
толкателя |
осуществляется |
вертикальной составляющей |
|
F′ = Fдвcosα , а вторая (горизонтальная) составляющая F′′ = Fдвsinα является не только бесполезной, но и вредной, ибо вызывает перекос толкателя в направляющих, в следствии чего в них увеличиваются силы реакции и, следовательно, силы трения.
При проектировании следует стремится к тому, чтобы угол давления был по возможности небольшим.
Угол давления может быть выражен следующим образом. Повернем
кулачок на небольшой угол |
ϕ , тогда |
|
|
|
|
|
|||||
|
|
tgα = |
ΔS/ρΔϕ , |
|
|||||||
tgα = |
dS |
dS/dϕ |
|
|
|
S′ |
|
||||
|
= |
r + S |
= |
|
|
|
, |
||||
ρdϕ |
r + S |
||||||||||
где S′ – аналог скорости; S – перемещение. |
|
|
|
|
|
||||||
Для смещенного толкателя |
S′ − e |
|
|
|
|
|
|||||
|
tgα = |
|
|
|
. |
|
|||||
|
S + |
|
|
|
|
||||||
|
r2 − e2 |
|
|||||||||
Равенство показывает, что угол давления зависит от очертания профиля |
|||||||||||
кулачка, угла поворота ϕ |
и величины |
|
|
минимального радиуса |
|||||||
профиля кулачка r, а именно: чем больше радиус r, тем меньше угол давления, но тем больше размеры кулачка.
В разных положениях механизма угол давления имеет различные значения и изменяется от 0 до наибольшего значения α доп .
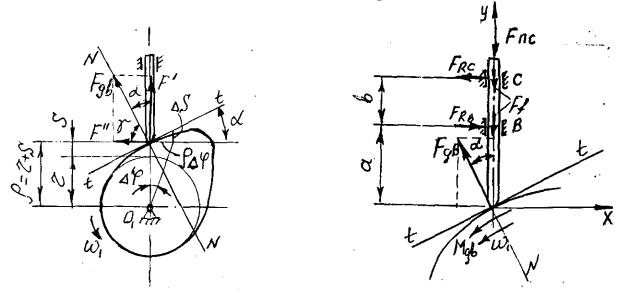
На толкатель в кулачковом механизме действуют силы (рисунок 4.3)
Fп.с. – сила полезного сопротивления, Ff = f(FRB + FRC ) - сила трения толкателя в направляющих, f – коэффициент трения скольжения.
Рисунок 4.2 |
|
|
|
|
|
Рисунок 4.3 |
|||
Величина движущей силы Fдв. может быть найдена с помощью |
|||||||||
уравнений равновесия. |
|
|
|
|
|
|
|
|
|
å FX = 0;- Fдв × sina + |
FRB - FRC = 0, |
||||||||
å FY = |
0;Fдв × cos a - Fn.c - |
f(FRB + |
FRC ) = 0, |
||||||
å |
MB = 0;Fдв × sina × а - FRC × в = 0. |
||||||||
Решив эту систему относительно Fдв получим |
|
|
|
||||||
|
Fдв = |
|
Fn.c |
|
|
|
. |
||
|
cos a - f[1 + |
2a / в]sina |
|||||||
Коэффициент полезного действия механизма |
|
|
|
||||||
|
h = An.c / Aдв = |
|
|
Fn.c × dS |
|
|
, |
||
|
|
F |
|
cos a × dS |
|||||
|
|
|
|
|
|
||||
|
|
|
|
дв |
|
|
|
|
|
где Аn.c – работа сил полезных сопротивлений; |
|
|
|
||||||
Адв – работа движущих сил. |
|
|
|
|
|
|
|
||
Подставив значения Fдв. |
|
|
|
|
|
|
|
||
h = cos α − f[1 + 2a / b] sinα |
= |
1 - f[1 + |
|
|
2a / b]tga . |
||||
|
cos a |
|
|
|
|
|
|
|
|
Коэффициент полезного действия механизма уменьшается по мере возрастания угла давления.