

Критическое значение угла давления, при котором движение толкателя в направляющих становится невозможным в следствии самоторможения от трения (заклинивания) при η = 0.
η = 1 − f[1 + 2a / b]tgα доп = 0 ,
откуда
tga доп |
= |
b |
|
|
f(b + |
2a) |
|||
|
|
В |
большинстве конструкций кулачковых механизмов с ползунным |
||
толкателем наибольший угол давления α max обычно не превышает 300 |
|||
|
|
a доп £ 300 |
g доп ³ 600 . |
В |
кулачково-коромысловых механизмах потери на трение обычно |
||
меньше |
a доп £ 450 |
g доп ³ 450 . |
|
5 Синтез рычажных механизмов
Проектирование любого механизма начинается с проектирования его схем. Проектирование схемы механизма по заданным его свойствам называется синтезом механизмов.
Принято различать два этапа синтеза механизма. Первый этап – выбор структурной схемы – выполняется на основании структурного синтеза.
Второй этап – определение постоянных параметров выбранной схемы механизма по заданным его свойствам.
Геометрические размеры звеньев находятся из условий воспроизведения:
-заданных траекторий движения (геометрический синтез);
-заданных скоростей или ускорений отдельных точек или звеньев (кинематический синтез);
-заданных сил (динамический синтез).
Для выполнения второго этапа синтеза механизма надо удовлетворить много часто противоречивым условиям, связанных с назначением механизма,
его эксплуатацией, технологии изготовления и т.п. |
|
||||
Но |
из всех условий обычно можно выбрать одно основное условие: |
||||
1) получение заданного закона движения, 2) скоростей, 3) сил. |
|
||||
Все |
остальные |
условия |
(кроме |
основного) |
называются |
дополнительными. Например, ограничение длин звеньев, минимальный вес, ограничение углов давления и др.
Решение указанных задач синтеза может вестись графическим, графоаналитическим и аналитическим методами. В последнее время широко применяется оптимизация параметров синтеза (выполнение всех условий) с применением ЭВМ.
5.1 Структурный синтез
То есть составление схем механизма без определения размеров его звеньев. Метод структурного синтеза создан Л.В.Ассуром (1914-1918 гг.) согласно которому любой плоский механизм может быть образован присоединением групп Ассура к механизму I класса.
Если присоединение групп происходит к одному механизму I класса, то механизм обладает степенью подвижности W = 1, т.к. группы с нулевой степенью подвижности не изменяют подвижности основного механизма.
Например, к основному механизму I класса (рисунок 5.1а стойка и звено 1) присоединяем двухповодковую группу 1 модификации (рисунок 5.1б звенья 2 и 3). Получили кривошипно-коромысловый механизм (рисунок 5.1в).
W = 3n-2Р1 = 3х3 – 2х4 = 1.
К полученному механизму присоединяем группу 2 модификации (рисунок 5.1г звенья 4, 5). Получили кривошипно-ползунный механизм (рисунок 5.1д).
Степень подвижности полученного шестизвенного механизма не изменяется W = 3n-2Р1 = 3х5 – 2х7 = 1.
Двухповодковую группу (рисунок 5.2а) присоединяем к двум механизмам I класса (рисунок 5.2б). Получаем пятизвенный механизм, обладающий двумя степенями подвижности (рисунок 5.2в).
W = 3n-2Р1 = 3х4 – 2х5 = 2.
Следовательно, степень подвижности механизма равна числу ведущих звеньев, т.е. звенья 1 и 4 имеют независимые друг от друга движения (раздельные приводы).
Трехповодковую группу присоединим к стойкам (рисунок 5.3). Степень подвижности W = 3n-2Р1 = 3х4 – 2х6 = 0, т.е. получили не механизм, а жесткую ферму. Для того, чтобы иметь механизм, следует один из свободных поводков присоединить к механизму I класса (пунктирное звено на рисунке 5.3).
В механизмах могут быть звенья не оказывающие никакого влияния на характер движения механизма в целом.
Например, схема паровозного колеса (рисунок 5.4). Ведущее звено 1 кривошипно-ползунного механизма усилено звеньями 4, 5, 6, которые не влияют на характер движения основного механизма и называются избыточными или пассивными. Такие звенья и принадлежащие им кинематические пары могут быть удалены из механизма без изменения общего характера движения основного механизма.
Степень подвижности основного механизма W = 3n-2Р1 = 3х3–2х4 = 1. Кулачковый механизм с роликовым толкателем (рисунок 5.5). Степень подвижности W = 3n-2Р1-Р2 = 3х3 – 2х3 – 1 = 2.
Ролик – избыточное звено применяется для замены трения скольжения в основном механизме трением качения. Степень подвижности основного механизма W = 3n-2Р1-Р2 = 3х2 –2х2 – 1 = 1.
а) |
б) |
в) |
г) |
д) |
Рисунок 5.1
а) |
б) |
в) |
Рисунок 5.3
Рисунок 5.2
Рисунок 5.4 |
Рисунок 5.5 |
|
5.2 Геометрический синтез
При геометрическом синтезе должно выполняться основное условие – условие существования (проворачиваемости) механизма.
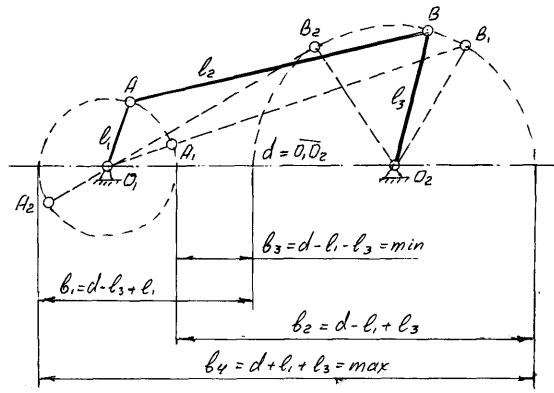
Условие проворачиваемости кривошипно-коромыслового механизма (рисунок 5.6).
Рисунок 5.6
b1 = d − 3 + 1 , |
|
|||
b2 = d − 1 + 3 , |
|
|||
b3 |
= d − 1 |
+ 3 |
− min min, |
|
b4 |
= d + 1 |
+ 3 |
− max max, |
|
b1 < 2 < b2 . |
|
|
||
Условие существования кривошипно-коромыслового механизма |
||||
(теорема Гразгофа) d − |
3 + 1 < 2 |
< d − 1 + 3 . |
||
Точки В1 и В2 – точки возврата, предельные положения звена 3. |
||||
Если b1 = b2, то |
α − 3 + 1 = α − |
1 + 3 или 1 = 3 - двухкривошипный |
||
механизм или механизм параллелограмма (рисунок 5.7). На рисунке 5.8 – механизм антипараллелограмма.
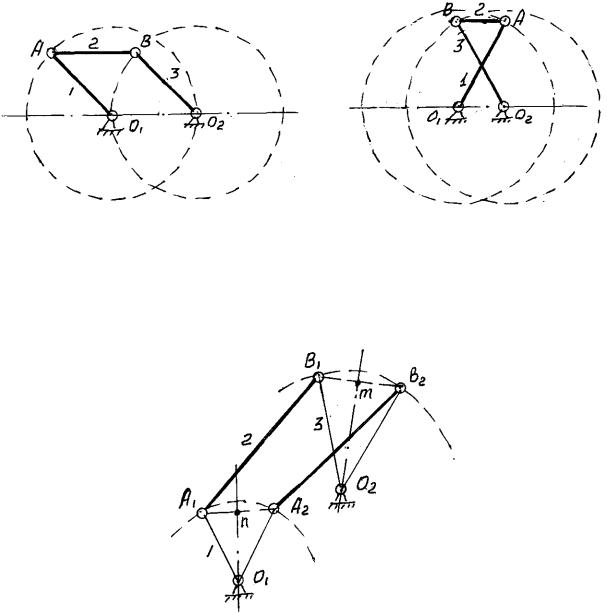
Рисунок 5.7 |
Рисунок 5.8 |
Геометрический синтез кривошипно-коромыслового механизма по двум заданным положениям шатуна А1В1 и А2В2 (рисунок 5.9).
Рисунок 5.9
Дано: положение звена А1В1 и А2В2.
Найти: О1 и О2.
Находим среднюю точку n. Проводим ось А1А2. Находим точку m. Проводим ось 22 В1В2. Через две точки А1 и А2, В1 и В2 можно провести множество окружностей, т.е. бесчисленное множество механизмов с
длинами звеньев 1 и 3 .
Синтез по трем положения звена ВС аналогичен. Имеет одно решение при нахождении точек О1 и О2 (рисунок 5.10).
Найденные решения следует проверить на условие существования кривошипного механизма.
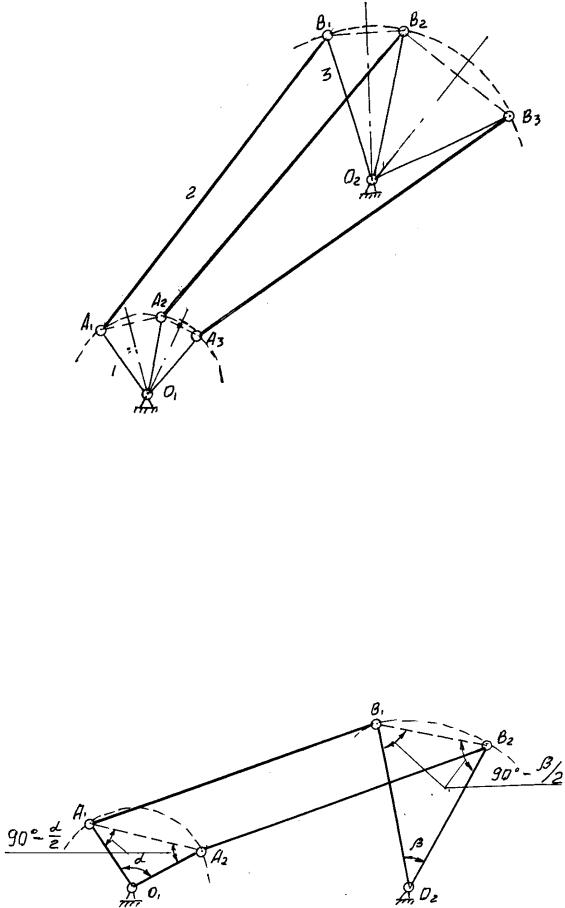
Рисунок 5.10
Можно потребовать дополнительно, чтобы при заданном перемещении шатуна АВ углы поворота звеньев О1А и О2В были также заданными, например, чтобы угол поворота звена О1А равнялся α, а угол поворота звена О2В равнялся β (рисунок 5.11). Тогда соединяем точки А1 и А2 прямой и откладываем при точках А1 и А2 углы, равные 90о – α/2. Точка пересечения прямых и определит положение оси О1 вращения звена О1А.
Точно также если соединить точки В1 и В2 и при этих точках отложить углы 90о – β/2, то точка пересечения прямых и определит и положение оси вращения О2 звена О2В.
Полученный механизм следует также проверить на условие существования.
Рисунок 5.11
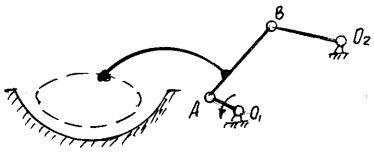
Геометрический синтез применяется при проектировании тестомесильных машин: для обеспечения требуемой траектории (рисунок 5.12).
Рисунок 5.12
5.3 Кинематический синтез
Синтез кривошипно-коромыслового механизма по коэффициенту изменения средней скорости коромысла.
Построим механизм в двух крайних положениях (рисунок 5.13). Эти положения получаются, когда кривошип и шатун располагаются на одной прямой линии.
Положение О1А1В1О2 называется внешним, а положение О1А2В2О2 – внутреннее. Коромысло О2В при переходе из одного крайнего положения в другое поворачивается на один и тот же угол размаха ψ, а кривошип О1А на разные углы φр (рабочий ход) и φх (холостой ход), так как φр > φх, то при постоянной скорости вращения кривошипа время перехода коромысла из одного крайнего положения и другое оказывается различным в зависимости от направления движения соответственно оказывается различной и средняя угловая скорость коромысла.
Отношение средних скоростей выходного звена за время его движения в прямом и обратном направлениях называют коэффициентом изменения средней скорости выходного звена (или через углы)
|
V |
ϕ р |
|
|
|
К = |
х = |
|
= К |
(5.1) |
|
j х |
|||||
|
Vр |
|
|
или через угол θ между совпадающими направлениями шатуна и кривошипа при крайних положениях коромысла
|
К = |
π + θ |
|
|
|
(5.2) |
|||
отсюда |
p - q |
|
|
||||||
|
|
|
|
|
|||||
К - 1 |
|
|
КG − 1 |
|
|
|
|
||
q = |
p = |
× 180 |
o |
(5.3) |
|||||
К + 1 |
K V + 1 |
|
|||||||
|
|
|
|
|
|
||||
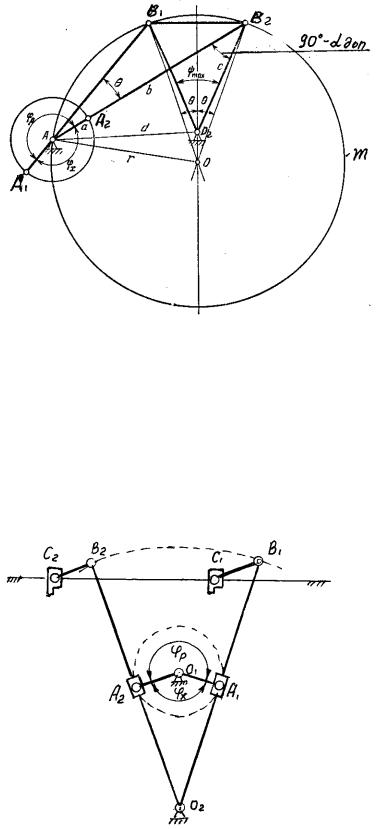
При заданном значении коэффициента – К определение искомых длин звеньев шарнирного четырехзвенника выполняется в следующем порядке (рисунок 5.13).
Рисунок 5.13
Задавшись углом размаха коромысла ψ max и его длины 3 с троим два
крайних положения коромысла О2В1 и О2В2. На отрезке В1В2 как на хорде строим окружность m, вмещающую вписанный угол θ , определяемый по формуле (5.3). Центр этой окружности О находится на пересечении
биссектрисы угла ψ max с линией, проведенной через точку В1 (или В2) под углом θ к указанной биссектрисе.
Рисунок 5.14
Основное условие синтеза, т.е. получение заданного угла θ , а следовательно, и коэффициента К, будет выполнено, если центр вращения кривошипа О1 выбрать на окружности m.
Кинематический синтез применяется при проектировании механизмов строгальных станков (рисунок 5.14) на рабочем ходу скорости резца меньше,
чем на холостом Vр < Vх , а углы поворота кривошипа ϕ р > ϕ х ,
К = |
V |
х |
= |
ϕ |
р |
|
V |
|
|
||||
j |
х |
|||||
|
|
|
||||
|
р |
|
|
|||
По заданному коэффициенту средней скорости – К и крайним положением резца подбираются длины звеньев и механизм проверяется на проворачиваемость.
q= КG − 1 × 180o K V + 1
O1A = O1O2 sin θ2
5.4 Динамический синтез
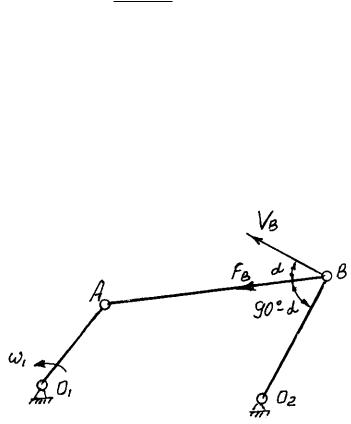
Одной из основных силовых характеристик механизма является угол давления и угол передачи (рисунок 5.15).
Рисунок 5.15
На звено – 3 действует сила FB - параллельно звену 2. Скорость точки В звену 3.
Острый угол между направлением действия силы FB и скоростью VВ называется углом давления α. Угол, равный 90О- α = γ называется углом передачи.
При проектировании механизмов нужно стремиться к тому, чтобы α был как можно меньше (при α=90О - механизм заперт), т.е. ограничивают угол давления предельным значением α < αдоп.