

Классификация двигателей по способу возбуждения. Схемы включения двигателей и положительные направления частоты вращения, момента, токов и других величин
Свойства и характеристики двигателей постоянного тока существенно зависят от того, как меняется магнитный поток двигателей при изменении их механической нагрузки. Характер изменения магнитного потока зависит в свою очередь от числа и способа включения обмоток возбуждения, т. е. от способа возбуждения двигателей. В зависимости от способа возбуждения различают:
двигатели независимого возбуждения;
двигатели параллельного возбуждения (ранее шунтовые);
двигатели последовательного возбуждения (ранее сериесные);
двигатели смешанного возбуждения (ранее компаундные).
Двигатели независимого возбуждения находят применение, когда обмотки якоря и возбуждения должны получать питание от различных источников постоянного тока. Это может быть в случае использования двигателей значительной мощности, обмотку якоря которых изготовляют обычно на более высокое напряжение, чем обмотку возбуждения. Кроме того, раздельное питание обмоток якоря и возбуждения применяется для расширения диапазона регулирования частоты вращения и улучшения качества переходных процессов пуска, торможения и реверса двигателей.
При изложении материала сначала будут рассмотрены свойства и характеристики двигателей параллельного, последовательного и смешанного возбуждения, получающих питание от источника (от сети) с неизменным напряжением, а далее, в конце § 9.18,— свойства и характеристики двигателя независимого возбуждения, обмотка якоря которого питается от источника с изменяемым напряжением.
Для более четкого представления о том, чем отличаются двигатели параллельного, последовательного и смешанного возбуждения, будем рассматривать их совместно, предполагая для удобства сравнения, что различные двигатели имеют одинаковое номинальные данные (в частности, номинальные магнитные потоки Фном, токи якоря Iя,ном , моменты Мном и частоты вращения nном).
|
|
|
Рис. 9.22. Схема включения двигателя смешанного возбуждения |
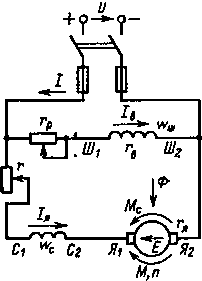
На рис. 9.22 приведена схема включения двигателя смешанного возбуждения. Магнитное поле двигателя возбуждается двумя обмотками: обмоткой параллельного возбуждения Ш1 — Ш2 и обмоткой последовательного возбуждения C1 — C2. В двигательном режиме работы обмотки включены согласно. Как и у генераторов, обмотки параллельного и последовательного возбуждения существенно отличаются в конструктивном отношении (см. § 9.7).
Имея схему включения двигателя смешанного возбуждения (рис. 9.22), нетрудно представить себе схемы включения двух других двигателей. Исключив мысленно обмотку C1 — C2, получим схему включения двигателя параллельного возбуждения; исключив цепь обмотки Ш1 — Ш2, получим схему включения двигателя последовательного возбуждения. В цепь якоря двигателей включают реостат r, служащий для пуска двигателей. Им же пользуются иногда для регулирования частоты вращения. Реостат rр включают в цепи двигателей параллельного или смешанного возбуждения лишь в том случае, если необходимо регулировать частоту вращения путем изменения магнитного потока.
Направления токов якоря Iя , возбуждения Iв , тока I, потребляемого из сети (рис. 9.22), магнитного потока Ф, ЭДС Е, момента М и частоты вращения и двигателя зависят от полярности напряжений на выводах обмоток якоря и возбуждения, а также от того, в двигательном или каком-либо из тормозных режимов работает электродвигатель.
Двигательным называется режим, при котором направление частоты вращения и якоря определяется направлением действия момента М двигателя. При установившемся движении момент М двигателя уравновешивается статическим моментом Мс, возникающим на валу двигателя под действием производственной машины. В двигательном режиме работы статический режим Мс является тормозящим и направлен против направления частоты вращения n. Тормозные режимы рассматриваются в § 9.19.
Поскольку направления токов, магнитного потока и других указанных выше величин могут быть различными, целесообразно для упрощения анализа работы двигателей условиться о положительных направлениях этих величин. За положительное направление частоты вращения n якоря примем одно из двух возможных ее направлений, например то, которое указано на рис. 9.22. За положительные направления других величин примем их действительные направления при указанном направлении вращения якоря и работе электродвигателя в двигательном режиме. Следует обратить внимание на то, что ток якоря Iя направлен при этом от Я1 к Я2, а ЭДС Е — от Я2 к Я1, т. е. против тока якоря и напряжения (см. принцип действия двигателя в § 9.2).