

Работа электрической машины постоянного тока в режиме двигателя. Основные уравнения
Под действием напряжения, подведенного к якорю двигателя, в обмотке якоря появится ток Iя. При взаимодействии тока с магнитным полем индуктора возникает электромагнитный вращающий момент
![]()
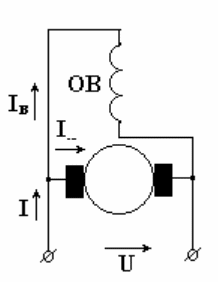
где CM - коэффициент, зависящий от конструкции двигателя. На рис. 11.12 изображен схематично двигатель постоянного тока, выделен проводник якорной обмотки.
Ток в
проводнике направлен от нас. Направление
электромагнитного вращающего момента
определится по правилу левой руки. Якорь
вращается против часовой стрелки. В
проводниках якорной обмотки индуцируется
ЭДС, направление которой определяется
правилом правой руки. Эта ЭДС направлена
встречно току якоря, ее называют
противо-ЭДС.
Рис. 11.12
В установившемся режиме
электромагнитный вращающий момент
Мэм уравновешивается
противодействующим тормозным моментом
М2 механизма,
приводимого во вращение.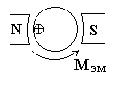
![]()
На рис.
11.13 показана схема замещения якорной
обмотки двигателя. ЭДС направлена
встречно току якоря. В соответствии со
вторым законом Кирхгофа ![]() ,
откуда
,
откуда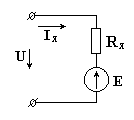
![]() .
(11.3)
.
(11.3)
Рис.11.13 Уравнение (11.3) называется основным уравнением двигателя.
Из уравнения (11.3) можно получить формулы:
 (11.4)
(11.4)
 (11.5)
(11.5)
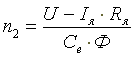
Магнитный поток Ф зависит от тока возбуждения Iв, создаваемого в обмотке возбуждения. Из формулы (11.5) видно, что частоту вращения двигателя постоянного тока n2 можно регулировать следующими способами:
изменением тока возбуждения с помощью реостата в цепи обмотки возбуждения;
изменением тока возбуждения с помощью реостата в цепи обмотки возбуждения;
изменением напряжения U на зажимах якорной обмотки.
Чтобы изменить направление вращения двигателя на обратное (реверсировать двигатель), необходимо изменить направление тока в обмотке якоря или индуктора.
37. Пуск двигателя. Механические характеристики двигателей постоянного тока
Пуск двигателей постоянного тока
Наиболее распространенными являются следующие способы пуска двигателей постоянного тока: прямой, при котором обмотка якоря непосредственно подключается к источнику постоянного напряжения: реостатный с помощью пускового реостата, который включается в цепь якоря, а также пуск при пониженном напряжении, подводимом к якорю. В двигателях постоянного тока падение напряжения в цепи якоря обычно не превышает 5... 10 % от номинального напряжения. Поэтому при прямом пу ске ток в якоре превышает номинальное значение в 10... 15 раз. Подобное увеличение силы тока недопустимо ни для сети, питаюшей двигатель, ни для коллектора и обмотки, ни для рабочего механизма, с которым соединен вал якоря. По этой причине прямой пуск применяется для двигателей, мощность которых не превышает 1 кВт. Наибольшее распространение получил реостатный пуск. Для ограничения пускового тока в цепь якоря двигателя включают пусковой реостат. Сопротивление пускового реостата рассчитывают из условия, чтобы пусковой ток не превышал 2-2,5 номинального значения. Следует помнить, что пусковой реостат предназначен для кратковременной работы. Поэтому по мере увеличения частоты вращения якоря сопротивление пускового реостата уменьшают. На крышке пускового реостата имеется указатель двух предельных режимов. Этим режимам соответствуют надписи "СТОП" и "ХОД". Надпись "СТОП" соответствует размыканию цепи обмотки якоря, что делает невозможным пуск двигателя. Надпись "ХОД" соответствует нулевому сопротивлению пускового реостата. В процессе пуска ручка пускового реостата плавно переводится из положения "СТОП" в положение "ХОД". Пуск происходит быстро и легко, если двигатель развивает пусковой момент. превышающий момент сопротивления на валу. Поэтому пуск производят при максимальном магнитном потоке. С этой целью перед пуском двигателя сопротивление в цепи обмотки возбуждения рекомендуется полностью вывесОграничение пу скового тока достигается также в случае пуска при пониженном напряжении, подводимом к якорю двигателя от источника с регулируемым напряжением. Механическая характеристика двигателя постоянного тока п способы регулирования его частоты врашения Зависимость установившейся частоты врашения якоря от момента на валу- двигателя при постоянном напряжении и сопротивлении цепи якоря называется механической характеристикой двигателя. Для получения уравнения механической характеристики запишем выражение второго закона Кирхгофа для цепи якоря: где индуктируемая в обмотке якоря. С учетом ее значения уравнение, записанное относительно частоты вращения. примет вид Из уравнения следует, что регулировать частоту вращения двигателя можно тремя способами:
1) включением дополнительного сопротивления в цепь обмотки якоря ( реостатное регулирование);
2) изменением магнитного потока ( полюсное регулирование);
3) изменением питающего напряжения (якорное регулирование).
Рассмотрим эти способы регулирования на примере двигателей постоянного тока с параллельным и независимым способами возбуждения (как получивших наибольшее распространение при постоянном моменте нагрузки на валу. При отсутствии дополнительного сопротивления в цепи якоря и номинальных значениях магнитного потока обмотки возбуждения и напряжения механическая характеристика имеет вид прямой линии, наклоненной к оси абсцисс. Такая механическая характеристика называется естественной. Это очень пологая прямая. Уменьшение частоты вращения не превышает 6...7 % от номинального значения и обусловлено, главным образом, наличием внутреннего сопротивления обмотки якоря. Включение дополнительного сопротивления в цепь якоря позволяет получить семейство искусственных механических характеристик. Все эти характеристики расположены ниже естественной. Реостатный способ регулирования находит широкое применение, так как позволяет получить любую пониженную частоту врашения при заданном моменте нагрузки на валу. К недостаткам данного способа относятся: 1) трудность поддержания частоты врашения при изменении момента нагрузки: 2) дополнительные потери мощности на регулировочном реостате, включенном в цепь обмотки якоря. Изменение сопротивления в цепи обмотки возбуждения (полюсное регулирование) позволяет варьировать частоту вращения двигателя обратно пропорционально величине магнитного потока. Это обстоятельство следует иметь в виду, не допуская чрезмерного уменьшения тока в обмотке возбуждения. Одним из преимуществ полюсного регулирования является его экономичность. так как ток возбуждения в рассматриваемых двигателях не превышает 10 % от номинального значения тока якоря. Другим преимуществом этого способа является достаточно жесткие механические характеристики, т. е. изменение частоты вращения, не превышающее 5 % номинального значения во всем диапазоне работы двигателя. Недостатком полюсного регулирования является то. что изменение магнитного потока можно производить лишь в области, расположенной ниже естественной механической характеристики, тогда как чаще требуется понижение частоты вращения. Якорное регулирование за счет изменения величины подводимого напряжения применяется, главным образом, в двигателях с независимым возбуждением. Пусковой реостат в этом случае не требуется, так как пуск начинается при пониженном напряжении, которое можно плавно повысить. Для изменения направления врашения двигателя необходимо изменить направление тока в обмотке возбуждения или полярность приложенного напряжения. Одновременное изменение двух указанных параметров не изменяет направление вращения якоря.
Механические характеристики электродвигателей постоянного тока
Рассмотрим двигатель с параллельным возбуждением в установившемся режиме работы (рис. 14). Обмотка возбуждения подключена параллельно якорной обмотке.
![]() ,
откуда
,
откуда 
 (6)
(6)
Механической характеристикой двигателя называется зависимость частоты вращения якоря n2 от момента на валу M2 при U = const и Iв = const. Уравнение (6) является уравнением механической характеристики двигателя с параллельным возбуждением. Рис. 14
Эта характеристика является жесткой. С увеличением нагрузки частота вращения такого двигателя уменьшается в небольшой степени (рис. 15).
На рисунке 16 изображен двигатель последовательного возбуждения. Якорная обмотка и обмотка возбуждения включены последовательно.
|
|
|
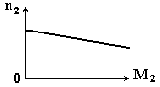 Рис.
15
Рис.
15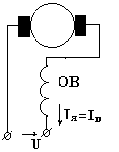 Рис.
16
Рис.
16Ток возбуждения двигателя одновременно является током якоря. Магнитный поток индуктора пропорционален току якоря.
![]()
где k - коэффициент пропорциональности. Момент на валу двигателя пропорционален квадрату тока якоря.
![]()
откуда
Механическая характеристика двигателя последовательного возбуждения является мягкой (рис. 17).
|
|
Уравнение
механической характеристики двигателя
последовательного возбуждения
выглядит следующим образом:
|
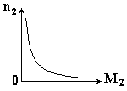 Рис.
17
Рис.
17
С увеличением нагрузки скорость двигателя резко падает. С уменьшением нагрузки на валу двигатель развивает очень большую частоту вращения. Говорят, что двигатель идет вразнос. Работа двигателя последовательного возбуждения без нагрузки недопустима. Двигатель смешанного возбуждения имеет механическую характеристику, представляющую собой нечто среднее между механическими характеристиками двигателя параллельного и последовательного возбуждения. Двигатели с параллельным возбуждением применяются для привода станков и различных механизмов, требующих широкой, но жесткой регулировки скорости. Двигатели с последовательным возбуждением применяются в качестве тяговых двигателей электровозов, трамваев и т.д., когда жесткость, то есть рывки момента недопустимы
.
Механические характеристики двигателей принято оценивать по трем показателям: устойчивости, жесткости и линейности. Естественная механическая характеристика, соответствующая (5.37) при Rд=0, изображена прямой линией 1. Механическая характеристика линейная; отклонение от линейного закона может быть вызвано реакцией якоря, приводящей к изменению потока Ф. Эта характеристика жесткая, так как при изменении момента нагрузки и соответственно скорости поток возбуждения не изменяется. Жесткость характеристики уменьшается при введении добавочного сопротивления в цепь якоря (прямые линии 2 и 3 – искусственные реостатные характеристики). Характеристики устойчивые, так как dω/dMэм.<0, и обеспечивают саморегулирование двигателя, т.е. он автоматически приспосабливается к изменяющейся нагрузке. Увеличение статического момента сопротивления на валу двигателя приводит к уменьшению угловой скорости и ЭДС якоря. Ток якоря, выражение для которого можно записать на основании (5.35),
Iя= (Uя-Eя)/(R я+ R д)=(Uя -kωФ;)/( R я R д ), (5.39)
возрастает. Соответственно растет электромагнитный момент вплоть до нового значения момента сопротивления (переход из точки А в точку В на механической характеристике). По аналогии на основании (5.37) может быть построено семейство искусственных характеристик при различных значениях Uя или Ф. Анализ таких характеристик будет проделан в разделе исполнительных двигателей постоянного тока (§ 5.7).
Рабочие характеристики. Рабочие характеристики двигателя – это зависимости угловой скорости ω, электромагнитного Мэм. и полезного М2 моментов и кпд η от полезной механической мощности на валу двигателя P2=M2ω при номинальном напряжении питания и отсутствии добавочных сопротивлений (рис. 5.20,б). Однако у рассматриваемых двигателей рабочие характеристики построены не в функции полезной мощности двигателя P2, а в функции тока якоря Iя. Объясняется это тем, что в двигателях постоянного тока электрическая мощность, идущая на преобразование в механическую, поступает через цепь якоря. Ток якоря двигателей независимого и параллельного возбуждения, у которых скорость слабо зависит от нагрузки, практически прямо пропорционален мощности P2. Уравнения же рабочих характеристик через ток Iя получить гораздо проще. Характеристики ω= f(Iя) и Mэм.=а(Iя) могут быть построены соответственно на основании уравнений (5.36) и (5.10). Без учета реакции якоря эти характеристики линейные, у реальных машин под действием реакции якоря (изменение Ф) характеристики могут оказаться нелинейными. Полезная составляющая момента двигателя M2 меньше электромагнитного момента на значение момента холостого хода M0=(ΔPмех.+ΔPм)/ ω, где ΔPмех. – механические потери мощности (трение); Δ Pм – магнитные потери. Характеристики полезного момента M2 и КПД η начинаются из точки реального холостого хода, которому соответствует ток якоря Iяо (рис. 5.20,б). Кривая КПД имеет типичный для всех электрических машин характер, т.к. в двигателе имеются постоянные потери (ΔPмех.+ΔPм+UвIв), практически не зависящие от нагрузки (тока якоря), и переменные потери в якоре I 2 я Rя .
Регулирование скорости. Угловую скорость двигателя при неизменном моменте сопротивления можно регулировать (см. (5.37)) тремя способами: 1)якорным – изменением напряжения на обмотке якоря Uя; 2)полюсным – изменением магнитного потока возбуждения Фв; 3)реостатным – изменением добавочного сопротивления Rд в цепи якоря. Регулировочные характеристики двигателей независимого возбуждения при якорном и полюсном способах управления будут подробно рассмотрены в разделе исполнительных двигателей (см. §5.7 ). При реостатном способе через реостаты Rд (см. рис. 5.19) должен длительно пропускаться значительный ток, что вызывает большие потери мощности, поэтому данный способ неэкономичен и применяется редко.
Пуск. В соответствии с уравнением равновесия моментов (2.29) условием пуска двигателя является неравенство Мп >Мст. Если это условие выполняется, то при включении двигателя в сеть ротор приходит в движение и разгоняется до установившегося режима. Ввиду того, что ротор обладает моментом инерции, разгоняется он не мгновенно – нарастание скорости происходит по закону, близкому к экспоненте. Пуск двигателя постоянного тока осложняется тем, что при ω=0 ЭДС Eя=0 и пусковой ток якоря Iяп= Uя/ Rяможет в 10 – 20 раз превышать номинальный ток, что опасно как для двигателя (усиление искрения, динамические перегрузки), так и для источника питания. Поэтому важнейшими показателями пускового режима являются кратность пускового тока Kiп= Iп/ Iном и кратность пускового момента Кмп= Мп/ Мном. При пуске необходимо обеспечить требуемую кратность пускового момента при возможно меньшей кратности пускового тока. Прямой пуск применяют обычно при кратности пускового тока K iп?6. При большем значении Kiпприменяют способы пуска, обеспечивающие снижение тока Iяп либо за счет подачи пониженного напряжения на обмотку якоря, либо за счет введения добавочного сопротивления в цепь якоря. Первый способ применяется в основном при работе двигателей в системах автоматического регулирования с якорным способом управления. Второй способ, называемый реостатным, распространен наиболее широко в нерегулируемом приводе. Сопротивление пускового реостата Rп= Rд (см. рис. 5.19) выбирают таким, чтобы ограничить Iяп до (1,4 – 1,8) Iя.ном у двигателей средней мощности и до (2,0 – 2,5) Iя.ном у двигателей малой мощности. По мере разгона якоря ток якоря уменьшается и пусковой реостат постепенно выводится
38. Регулирование частоты вращения двигателя постоянного тока. Работа двигателей в тормозных режимах
РАБОТА ДВИГАТЕЛЕЙ В ТОРМОЗНЫХ РЕЖИМАХ
Виды электрического торможения. Электрические двигатели, как правило, используют не только для вращения механизмов, но и для их торможения. Электрическое торможение позволяет быстро остановить механизм или уменьшить его частоту вращения без применения механических тормозов.
Различают три вида электрического торможения двигателей постоянного тока: 1) рекуперативное торможение — генераторное торможение с отдачей электрической энергии в сеть; 2) динамическое или реостатное торможение — генераторное торможение с гашением выработанной энергии в реостате, подключенном к обмотке якоря; 3) электромагнитное торможение — торможение противовключением.
Во всех указанных режимах электромагнитный момент М воздействует на якорь в направлении, противоположном и, т. е. является тормозным.
Рекуперативное торможение. Двигатель с параллельным возбуждением переходит в режим рекуперативного торможения при увеличении его частоты вращения и выше п0 = U/ceФ. В этом случае ЭДС машины становится больше напряжения сети и ток согласно (8.80) изменяет свое направление, т. е. двигатель переходит в генераторный режим. В этом режиме машина создает тормозной момент, а выработанная электрическая энергия отдается в сеть и может быть полезно использована.
В машине с параллельным возбуждением (рис. 8.71, а) механические характеристики генераторного режима являются
|
|
Рис. 8.71. Схема и механические характеристики машины постоянного тока в двигательном и генераторном режимах |
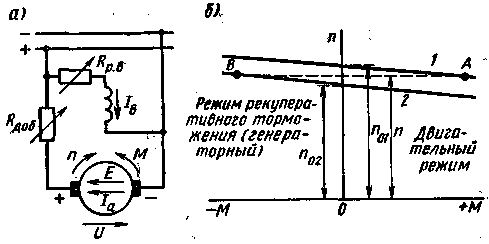
продолжением механических характеристик двигательного режима в область отрицательных моментов (рис. 8.71, б). Поэтому переход из двигательного режима в генераторный может происходить автоматически, если под действием внешнего момента якорь будет вращаться с частотой n > n0. Можно перевести машину в генераторный режим и принудительно, если перевести ее на работу с характеристики 1 на характеристику 2, уменьшив n0 путем увеличения магнитного потока (тока возбуждения) или снижения напряжения, подводимого к двигателю, В этом случае некоторой частоте вращения и соответствует на характеристике 1 двигательный режим (точка А), а на характеристике 2 — режим рекуперативного торможения (точка В).
Двигатели с последовательным возбуждением не могут переходить в резким рекуперативного торможения. При необходимости рекуперативного торможения схему двигателей в тормозном режиме изменяют, превращая двигатели в генераторы с независимым возбуждением.
|
|
|
Рис. 8.72. Схема и механические характеристики двигателя с параллельным возбуждением в режиме динамического торможения |
Двигатели со смешанным возбуждением могут автоматически переходить в генераторный режим, что обусловило их применение в троллейбусах, трамваях и других устройствах с частыми остановками, где двигатель должен обладать мягкой механической характеристикой.
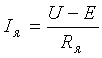
Динамическое торможение. При этом виде торможения двигателя с параллельным возбуждением обмотку якоря отключают от сети и присоединяют к ней реостат Rдо6 (рис. 8.72, а) При этом машина работает как генератор, создает тормозной момент, но выработанная электрическая энергия бесполезно гасится в реостате. Регулирование тока Ia = Е/(ΣRa + Rдоб), т. е. тормозного момента М, осуществляют путем изменения сопротивления Rдоб, подключенного к обмотке якоря
(рис. 8.72, б), или ЭДС Е (воздействуют на ток возбуждения). При n = 0 тормозной момент Мравен нулю, следовательно, машина не может быть заторможена в неподвижном состоянии.
|
|
|
Рис. 8.73. Схемы машины с последовательным возбуждением в режимах двигательном (в) и динамического торможения (б) |
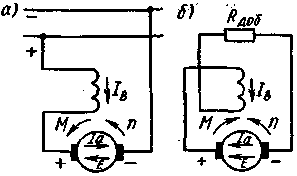
Двигатель с последовательным возбуждением может работать в режиме динамического торможения при независимом возбуждении и при самовозбуждении. При независимом возбуждении обмотку возбуждения отключают от обмотки якоря и подключают к питающей сети последовательно с резистором, сопротивление которого выбирают так, чтобы ток возбуждения не превышал номинального значения. При этом механические характеристики двигателя линейные (см. рис. 8.72, б). При самовозбуждении при переводе машины в генераторный режим необходимо переключить провода, подводящие ток к обмотке возбуждения (рис. 8.73, а, б). Последнее необходимо для того, чтобы при изменении направления тока в якоре (при переходе с двигательного режима в генераторный) направление тока в обмотке возбуждения оставалось неизменным и создаваемая этой обмоткой МДС Fв совпадала по направлению с МДС Fост от остаточного магнетизма. В противном случае генераторы с самовозбуждением размагничиваются.
|
|
|
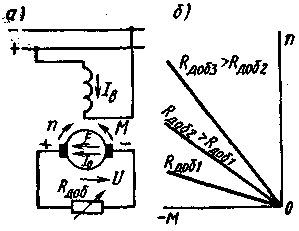
Рис. 8.74. Зависимости ЭДС от тока якоря для двигателя с последовательным возбуждением в режиме динамического |
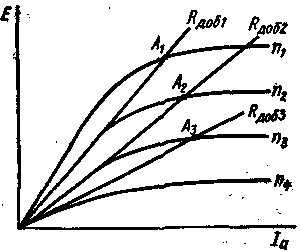
На рис. 8.74 показаны зависимости ЭДС Еот тока якоря Iа при различных частотах вращения (n1 > n2 > n3 > n4) и вольт-амперные характеристики Iа(ΣRa + Rдоб) = f(Ia) полного сопротивления, включенного в цепь якоря (Rдоб1> Rдоб2 > Rдоб3).
Точки пересечения А1, А2 и А3 указанных зависимостей определяют значения тока якоряIa = сеnФ/(ΣRa + Rдоб), при котором работает машина в режиме динамического торможения, а следовательно, и значение тормозного момента — М. При увеличении n и неизменном значении Rдоб возрастает ЭДС, ток якоря и тормозной момент.
Самовозбуждение оказывается возможным только при частоте вращения, большей некоторого критического значения nкр, при котором вольт-амперная характеристика сопротивления цепи якоря располагается по касательной к зависимости Е = f(Ia). Так, например, при подключении к машине реостата, с сопротивлением Rдоб1 тормозной режим при частоте вращения n1 может быть реализован (точка А1);
|
|
Рис. 8.75. Зависимость частоты вращения от тока двигателя в режиме динамического торможения якоря (а) и механические характеристики (б) |
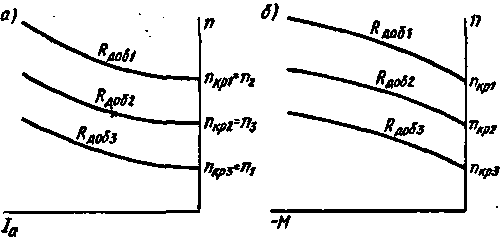
при уменьшении же ее до значения n2 он невозможен. На рис. 8.75,а показаны зависимости частоты вращения от тока якоря, а на рис. 8.75,б
|
|
|
Рис.8.76. схема и механические характеристики двигателей в режиме электромагнитного торможения |
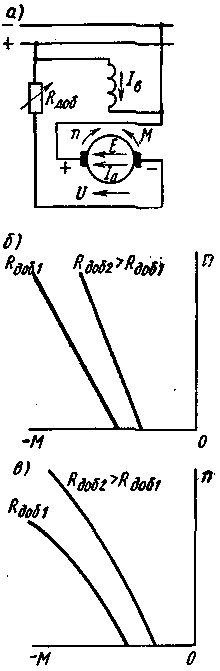
— механические характеристики двигателя при работе в режиме динамического торможения. В соответствии с рис. 8.74 при увеличении Rдоб динамическое торможение оказывается возможным при более высоких частотах вращения (nкр1 > nкр2 > nкр3). Двигатель со смешанным возбуждением также может работать в режиме динамического торможения.
Электромагнитное торможение. В этом режиме изменяют направление электромагнитного момента М, сохраняя неизменным направление тока из сети, т. е. момент делают тормозным. Последнее осуществляют так же, как и при изменении направления вращения двигателя — путем переключения проводов, подводящих ток к обмотке якоря (рис. 8.76, а) или к обмотке возбуждения. Чтобы ограничить значение тока в этом режиме, в цепь обмотки якоря вводят добавочное сопротивление Rдоб. Регулирование тока Ia = (U + Е)/(ΣRa + Rдоб), т. е. тормозного момента М, осуществляют путем изменения сопротивления Rдоб или ЭДС Е (тока возбуждения Iв). Механические характеристики в этом режиме для двигателей с параллельным и последовательным возбуждением показаны на рис. 8.76, б и в.
С энергетической точки зрения электромагнитное торможение является наиболее невыгодным, поскольку машина потребляет как механическую, так и электрическую энергию, которые гасятся в обмотке якоря и во включенном в ее цепь реостате. Однако при этом способе можно получать большие тормозные моменты при низких частотах вращения и даже при n = 0, поскольку в этом случае ток Ia= U/(ΣRa + Rдоб).
40. Назначение и области применения трансформаторов. Устройство и принцип действия.