

Индивидуальные задания
Проанализируйте функционирование приведенных в тексте структур и конфигураций ввода-вывода при возможных повреждениях.
Разработайте для заданной преподавателем промежуточной станции микропроцессорную диспетчерскую централизацию.
Разработайте для заданной преподавателем промежуточной станции микропроцессорный маршрутный набор, или полностью микропроцессорную централизацию.
Разработайте микропроцессорное оборудование для сигнальной точки автоблокировки.
Разработайте микропроцессорную переездную централизацию.
10. Примеры практической реализации микропроцессорных систем
10.1.Микропроцессорная диспетчерская централизация
Целью приведенного примера является дать начальные представления и навыки синтеза структуры микропроцессорной системы управления. Все последующие рассуждения и выводы сделаны применительно к промежуточной станции, схема которой представлена на рис. 10.1. Устройства ввода-вывода микропроцессорной диспетчерской централизации (ДЦ) подключаются в основном к элементам конструкции пульта электрической централизации. Такая схема в настоящее время применяется наиболее часто и существенно упрощает согласование, поскольку при таком подходе требуется минимальное количество кабеля для подключения. Вместе с тем этот подход определяет специфику подключения входных и выходных цепей микроконтроллера. Входы подключаются к лампам пульта, а выходы к обмоткам реле электрической централизации через контакты реле резервного управления параллельно соответствующим кнопкам. Однако это не исключает подключение выходов непосредственно к обмоткам реле, а входов – к их контактам в релейном помещении (рис. 10.2).
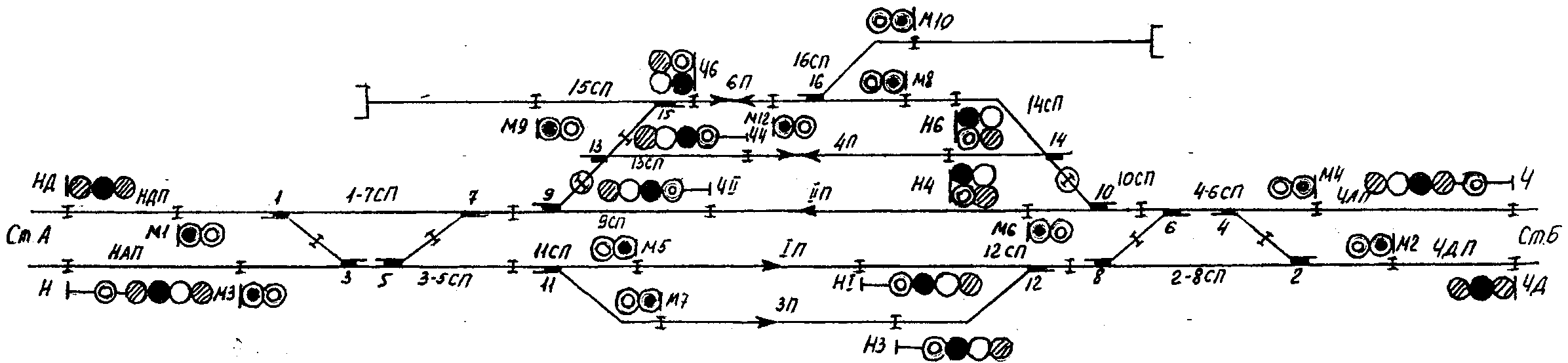
Рис. 10.1. Схематический план станции
Для упрощения расчета примем одноканальную конфигурацию контроллеров и цепей ввода-вывода. Такой подход можно иллюстрировать утверждением: одно исполнительное устройство – один выход, один датчик – один вход.
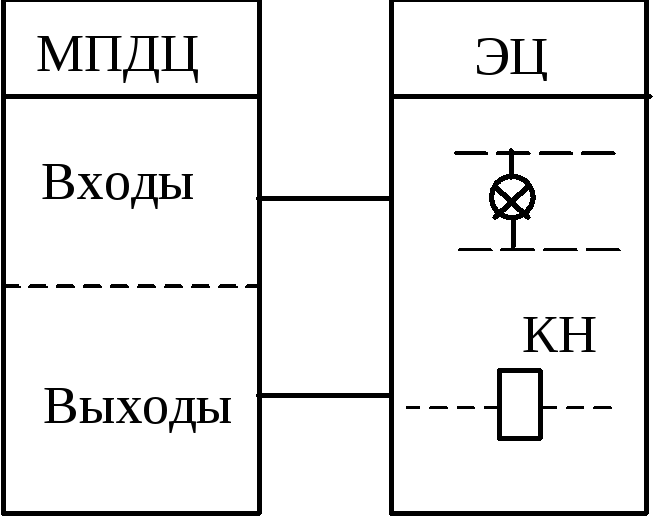
Рис. 10.2. Принцип увязки МПДЦ с устройствами электрической централизации
Объекты контроля
Будем считать, что в системе ДЦ контролируется состояние следующих элементов:
Приемо-отправочных путей (табл. 10.1);
Изолированных секций (табл. 10.2);
Участков приближения – удаления (табл. 10.3);
Сигналов (поездных и маневровых) (табл. 10.4);
Стрелок (табл. 10.5);
Устройств электропитания (табл. 10.6).
Таблица 10.1
Состояние приемо-отправочных путей
|
Приемо-отправочные пути. Состояния: | ||
|
Занят |
1 |
1 вход |
|
Свободен |
0 | |
|
В маршруте свободен |
1 |
1 вход |
|
Не замкнут и свободен |
0 | |
Для контроля состояния пути необходимо два входа, тогда общее число входов: nп= 2*5=10
Таблица 10.2
Состояние изолированных секций
|
Изолированные секции. Состояния: | ||
|
Занята |
1 |
1 вход |
|
Свободна |
0 | |
|
В маршруте свободна |
1 |
1 вход |
|
Не замкнута в маршруте и свободна |
0 | |
Для контроля состояния изолированных секций необходимо по два входа на каждую,
тогда: nс=16*2=32
Примечание: состояние “1” определяется горящей лампой, когда на ней есть напряжение, которое и поступает на модуль ввода.
Таблица 10.3
Состояние участков приближения-удаления
|
Участки приближения-удаления. Состояния: | ||
|
Занят |
1 |
1 вход |
|
Свободен |
0 | |
Для контроля состояния участков приближения-удаления необходимо: nу=8*1=8
Таблица 10.4
Состояние светофоров
|
Светофоры поездные. Состояния: | |||
|
Выходные и маршрутные | |||
|
Открыт поездной |
1 |
1 вход | |
|
Закрыт поездной |
0 | ||
|
Открыт маневровый |
1 |
1 вход | |
|
Закрыт маневровый |
0 | ||
|
Входные | |||
|
Открыт |
1 |
1 вход |
3 входа |
|
Закрыт |
0 | ||
|
Пригласительный включен |
1 |
1 вход | |
|
Пригласительный не включен |
0 | ||
|
Неисправность |
1 |
1 вход | |
|
Исправное состояние |
0 | ||
|
Маневровые | |||
|
Открыт |
1 |
1 вход | |
|
Закрыт |
0 | ||
Для контроля состояния светофоров необходимо:
nвходных=2*3=6
с учетом светофоров НД, ЧД: 6+2*2=10 входов
nвыходных=7*1=7 входов
nманевровых=18*1=18 входов
Итого по контролю светофоров:
nоб=nвходных+nвыходных+nманевровых =10+7+18=35 входов
Таблица 10.5
Состояние стрелок
|
Стрелки. Состояния: | ||
|
Контроль плюсового положения |
1 |
1 вход |
|
Отсутствие контроля плюсового положения |
0 | |
|
Контроль минусового положения |
1 |
1 вход |
|
Отсутствие контроля минусового положения |
0 | |
|
Взрез стрелки |
1 |
1 вход |
|
Отсутствие взреза |
0 | |
Для контроля состояния стрелок необходимо: nстр=12*3=36 входов
Таблица 10.6
Состояние устройств электропитания
|
Устройства электропитания. Состояния: | ||
|
Фидер включен |
1 |
1 вход |
|
Фидер выключен |
0 | |
|
Фидер исправен |
1 |
1 вход |
|
Фидер неисправен |
0 | |
Для контроля остальных цепей электропитания зарезервируем 13 входов. Итого для контроля электропитания с учетом фидеров А и В необходимо: nп=2+2+13=17 входов.
Итого по расчету общее число дискретных двухпозиционных объектов контроля составляет:
nрасч=10+32+8+35+36+17=138 входов.