

Функциональные модули
Применяются в задачах счета импульсов, позиционирования, формирования последовательности команд и управления серводвигателями. Позиционирование может осуществляться непрерывно и дискретно. Использование функциональных модулей позволяет разгрузить центральный процессор за счет передачи части функций, связанных с выполнением конкретной задачи, в специализированный модуль.
FM350-1 интеллектуальный модуль одноканального счетчика: 32 разряда (от 0 до 32 бит) выполняет обычное, двойное или среднеквадратичное преобразование, работает с прерываниями.
FM 350-2 восьмиканальный счетчик: 32 разряда, частота 10 КГц, выполняет обычное, двойное или квадратурное преобразование, работает с прерываниями.
SM35 – модуль счета и формирования импульсов заданной длительности: 8 счетных входов и 8 дискретных выходов, суммирующий и вычитающий счет.
FM 351 – двухканальный модуль позиционирования двух независимых осей. Каждый канал имеет 4 дискретных входа для управления направлением вращения двигателя и изменения скорости вращения.
FM 352 – высокоскоростной модуль для формирования последовательности команд управления с запуском по сигналу датчика положения.
FM 353 – модуль предназначенный для управления шаговым двигателем в задачах с требованиями высокой точности и скорости позиционирования. Аналогичный модуль FM 354 обеспечивает управление серводвигателем при жестких требованиях по точности и скорости выполнения операций.
FM 357 – универсальный модуль, обеспечивает непрерывное управление движением и позиционирование до 4 электроприводов с шаговыми электродвигателями или серводвигателями.
IM178-4 – интерфейсный модуль для построения децентрализованных систем позиционирования. Позволяет подключать к ведущим сетевым контроллерам до двух систем позиционирования.
FM 355 – универсальный 4-канальный модуль для решения задач автоматического регулирования (температуры, давления, потока и других параметров).
FM 374 – модуль имитации входных сигналов. Имеет 16 переключателей для имитации входных и выходных сигналов.
Коммуникационные модули
Предназначены для организации связи с контроллерами Simatic S7, Simatic S5, другими контроллерами, а также принтерами, модемами, сканерами и другими устройствами. Конфигурирование коммуникационных модулей может быть произведено при помощи встроенных утилит языка STEP-7 либо через центральный процессор путем записи параметров настройки коммуникационного процессора в блок данных центрального процессора. Коммуникационные модули обеспечивают работу Simatic S7-300 в сети Profibus-DP, Profibus-FMS, Industrial, Ethernet, а также по AS-интерфейсу.
CP 342-2 – коммуникационный процессор для работы по AS-интерфейсу с выполнением функции ведущего сетевого устройства. Обеспечивается доступ к 248 двухпозиционным объектам управления. Может работать в двух режимах: стандартном без вызова ведущего устройства и в расширенном, при котором ведомые устройства имеют возможность обращения к ведущему.
CP 342-5 – модуль, обеспечивающий работу контроллера в сети Profibus-DP с функциями:
работа контроллера Simatic S7-300 в качестве ведомого или ведущего сетевого устройства;
работа станций распределенного ввода-вывода ET-200M в качестве ведомых сетевых устройств;
связь с системами человеко-машинного интерфейса.
CP 343-1 – модуль, предназначенный для подключения контроллера к сети Industrial Ethernet. Модуль имеет собственный процессор, обеспечивает поддержку:
интерфейса приемопередатчика с простой и оптимизированной передачей данных объемом до 8 Кбайт;
организацию связи между S7-300 (только сервер), S7-400 (сервер и клиент) и устройствами человеко-машинного интерфейса.
Коммуникационный модуль CP 343-1TCP работает в сети Industrial Ethernet со стандартом TCP/IP.
CP 343-5 предназначен для подключения контроллеров Simatic S7-300 к сети Profibus-FMS, обеспечивая:
связь с контроллерами Simatic S7;
связь с программаторами и устройствами человеко-машинного интерфейса;
связь с контроллерами Simatic S5.
Сервисные функции: запись и чтение переменных, поддержка доступа к переменным, поддержка широковещательных сообщений, идентификация партнера по запросу с определением его состояния.
Интерфейсные модули IM361 и IM365. Применяются для построения многоуровневых систем с процессорами CPU314 и более мощными. МодульIM365 позволяет организовать связь между центральной стойкой и одной стойкой расширения (рис. 8.43).
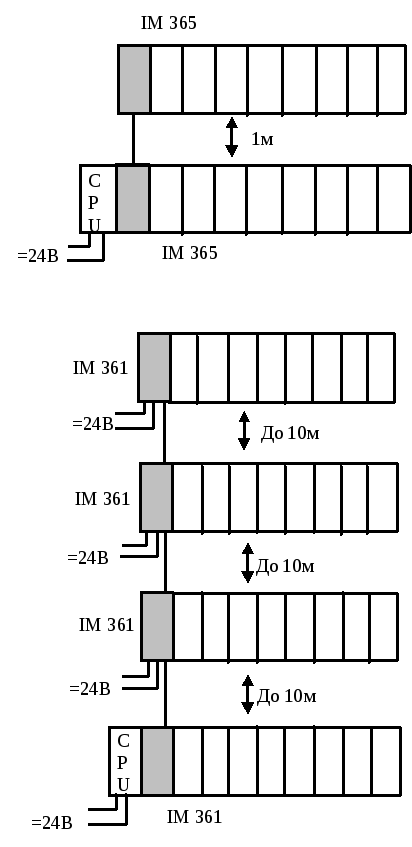
Рис. 8.43. Организация связи между центральной стойкой и стойками расширения
Модули IM361 позволяют создавать конфигурации с центральной стойкой и тремя стойками расширения. Питание стоек расширения поступает от центральной стойки. Стойки расширения не имеют связи с коммуникационной шиной, поэтому в них нельзя устанавливать процессорные и функциональные модулиFM353,FM354,FM355,FM-NC. В каждой стойке может быть установлено до 8 модулей.
Блоки питания PS307 обеспечивают функционированиеS7-300 от сети 120/230 В. Модули имеют электронную защиту от короткого замыкания (табл. 8.22).
Модуль питания устанавливается на стойку под номером 1. Справа от него монтируется центральный процессор, затем модуль расширения IM, далее сигнальные либо функциональные модули.
Таблица 8.22.
Параметры блоков питания
|
Параметры |
PS307-1B |
PS 307-1E |
PS 307-1K |
|
Входное напряжение |
~120/230 В |
~120/230 В |
~120/230 В |
|
Допустимый перерыв питания |
20 мс |
20 мс |
20 мс |
|
Потребляемый ток при ~230В |
0.5 А |
1 А |
1.7 А |
|
Ток К.З. |
20 А |
45 А |
65 А |
|
Выходной ток |
2 А |
5 А |
10 А |
|
Выходное напряжение |
24 В |
24 В |
24 В |