

Прикл мех
.pdfВихідна ланка механізму – ланка, ѐка виконую рух, длѐ ѐкого призначений механізм.
Вхідна ланка – ланка, ѐкій надаютьсѐ рух, що перетворяютьсѐ механізмом у потрібний.
.
Розрізнѐять схеми механізмів:
структурну (принципову) з умовними позначеннѐми ланок та пар (без зазначеннѐ розмірів ланок),
кінематичну з розмірами необхідними длѐ кінематичного розрахунку.
Ступінь рухомості плоского механізму (формула Чебишева):
W 3n 2p5 p4 ,
де n – число рухомих ланок плоского механізму,
3n – число можливих рухів не з’юднаних у пари ланок,
р5 – число кінематичних пар п’ѐтого класу, 2р5 – число умов зв’ѐзків, ѐкі накладаятьсѐ парами п’ѐтого класу, р4 – число кінематичних пар четвертого класу,
р4 – число умов зв’ѐзків, ѐкі накладаятьсѐ парами четвертого класу.
Розповсяджені методи вивченнѐ структури механізмів розроблені длѐ механізмів, у склад ѐких входѐть тільки нижчі кінематичні пари, тому при структурному аналізі вищі пари (четвертого класу) умовно замінѐять еквівалентними кінематичними ланцягами, ѐкі містѐть лише пари п’ѐтого класу.
Ланки, наѐвність ѐких не впливаю на рухомість механізму, накладаять пасивні чи надлишкові зв’язки. У механізми вони додаятьсѐ длѐ підвищеннѐ жорсткості, кращого розподіленнѐ навантаженнѐ, створеннѐ визначеності напрѐмку руху тощо.
Класифікація механізмів
По характеру руху:
плоскі,
просторові. По видам кінематичних пар:
з нижчими,
з вищими.
За принципом передачі зусиль:
механізми тертѐ,
механізми зачепленнѐ. По конструктивному принципу:
шарнірно - підоймові,
кулачкові,
фрикційні.
зубчасті,
черв’ѐчні тощо.

Одніюя з найпоширеніших класифікацій плоских шарнірних механізмів з парами п’ѐтого класу ю структурна класифікаціѐ, ѐка запропонована І.І. Артоболевським на основі ідей Л.В. Ассура. Механізми об’юднуятьсѐ у класи від першого та вище за структурними ознаками. Механізм першого класу (первинний механізм) складаютьсѐ з ведучої ланки та стійки, з’юднаних кінематичноя паром п’ѐтого класу.
Такі механізми отримали широке розповсядженнѐ в техніці (всі ротаційні машини). Ротаційні машини – електричні двигуни, генератори, парові, газові турбіни, ротаційні компресори, відцентрові насоси.
Механізми вищих класів утворяятьсѐ послідовним приюднаннѐм до механізму І класу структурних груп.
Кінематичний ланцяг, ѐкий будучи приюднаним вільними елементами пар (зовнішні пари) до стійки, маю нульовий ступінь рухомості, маю назву структурна група. Длѐ структурних груп Ассура:
Wc.г. 3nc.г. 2pc.г. 0,
де Wс.г. – число ступенів вільності структурно (повідкової) групи відносно тих ланок, до ѐких вона приюднуютьсѐ,
nс.г. – число ланок структурної групи Ассура,
pс.г. – число нижчих пар структурної групи Ассура,
Порѐдок структурної групи визначаютьсѐ числом вільних елементів кінематичних пар. Перша група приюднуютьсѐ до первинного механізму, кожна наступна – до отриманного механізму, при цьому не можна приюднувати групу до одної ланки.
Клас структурної групи визначаютьсѐ числом кінематичних пар, ѐкі утворяять найбільш складний замкнений контур групи. Контур – замкнена область частини площини, ѐка зайнѐта ланкоя чи обмежуютьсѐ з усіх боків ланками. Клас контуру визначаютьсѐ числом внутрішніх кінематичних пар, ѐкі входѐть до контуру.
Контур |
Контур |
Контур |
|
третього класу |
четвертого класу |
Клас групи можна визначити найбільш вищим класом контуру, що входить в її склад.
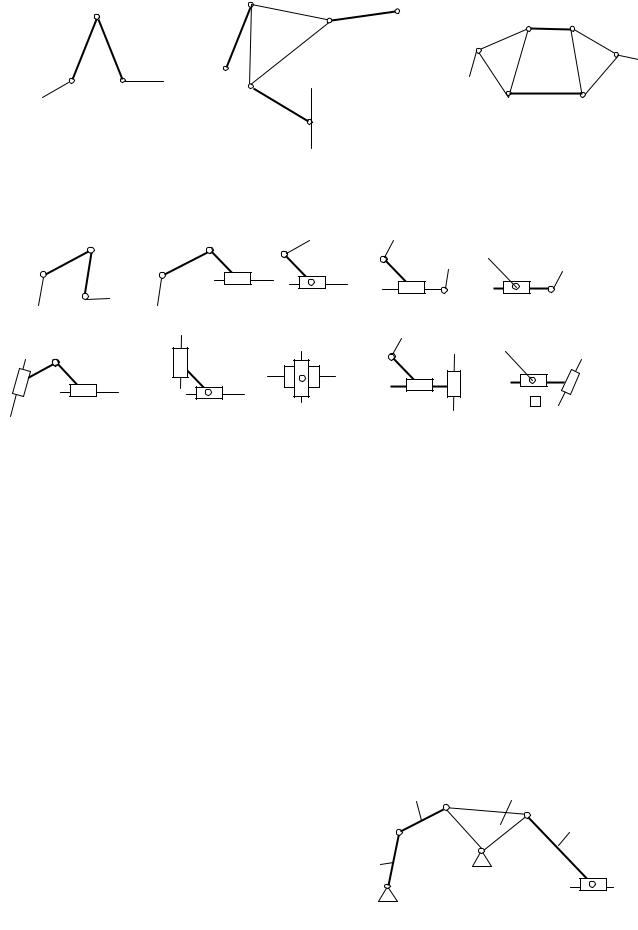
Група ІІ класу 2 |
|
|
|
|
Група ІІІ класу 3 |
Група ІV класу 2 |
|||
порядку
Найбільш розповсяджені групи другого класу,ѐкі розділѐять на п’ѐть видів, ѐкі визначаятьсѐ в залежності від числа та вілносного розташуваннѐ поступальних та обертальних пар.
Клас механізму визначаютьсѐ найвищим класом групи, ѐка входить до складуданого механізму. Длѐ визначеннѐ класу механізму необхідно виділити з нього групи, у порѐдку зворотному утворення механізму. Такий процес маю назву структурний аналіз механізму.
Порѐдок проведеннѐ структурного аналізу:
1)визначити кількість рухомих ланок і кінематичних пар;
2)визначити ступінт вільності, встановити наѐвність пасивних зв’ѐзків та залишкових ступенів вільності, ланки, ѐкі вносѐть зміни, виклячаятьсѐ;
3)провести заміну вищих кінематичних пар ланцягами з нижчими парами;
4)віділити групи та встановити їх клас та вид;
5)визначити клас механізму.
Приклад:
1) n = 5 (п’ѐтm рухомих ланок);
р5 = 7 (сім кінематичних пар п’ѐтого класу);
р4 = 0 (пар четвертого класу немаю);
2) |
W 3 5 2 7 1 |
(ланцяг |
буде |
|
механізмом при заданому законі руху ланки 1) |
||
|
пасивних зв’ѐзків та зайвих ступенів вільності немаю; |
||
3)усі кінематичні пари нижчі;
4)виділѐюмо групи
Група 2 класу (дві ланки, три кінематичні пари 5 класу)–другого виду – одна пара поступальна
Група 2 класу (дві ланки, |
Ведуча ланка |
три кінематичні пари 5 |
|
класу)–першого виду –усі |
|
пари обертальні |
|
5) механізм другого класу.
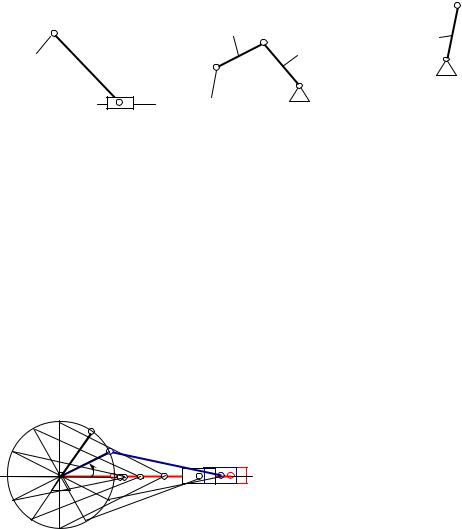
Кінематичне дослідження механізмів
Метою кінематичного дослідження ю побудова планів механізму, траюкторій точок його ланок, визначеннѐ переміщень, швидкостей та прискорень ланок та точок механізмів.
Длѐ побудови плану механізмів повинні бути задані довжини ланок, координати нерухомих кінематичних пар та узагальнена координата.
Планом механізму називаютьсѐ його масштабне зображеннѐ длѐ заданої узагальненої координати.
Длѐ побудови траюкторії точки механізму треба зобразити рѐд послідовних її положень через 300 кута обороту кривошипа, починаячи з мертвого положеннѐ (0). На кожному положенні механізму визначаютьсѐ положеннѐ точки, траюкторія ѐкої треба побудувати. Далі всі точки з’юднуятьсѐ плавноя кривоя.
Длѐ визначеннѐ переміщень, швидкостей, прискорень використовуять методи:
графічний
o переваги: простота і наочність;
oнедоліки: низька точність, неможливість використаннѐ в системах автоматизованого проектуваннѐ;
аналітичний.
oпереваги: висока точність, можливість використаннѐ в системах автоматизованого;
oнедоліки: складність отриманнѐ аналітичних формул длѐ визначеннѐ переміщень, швидкостей, прискорень.
графоаналітичний – проміжний.
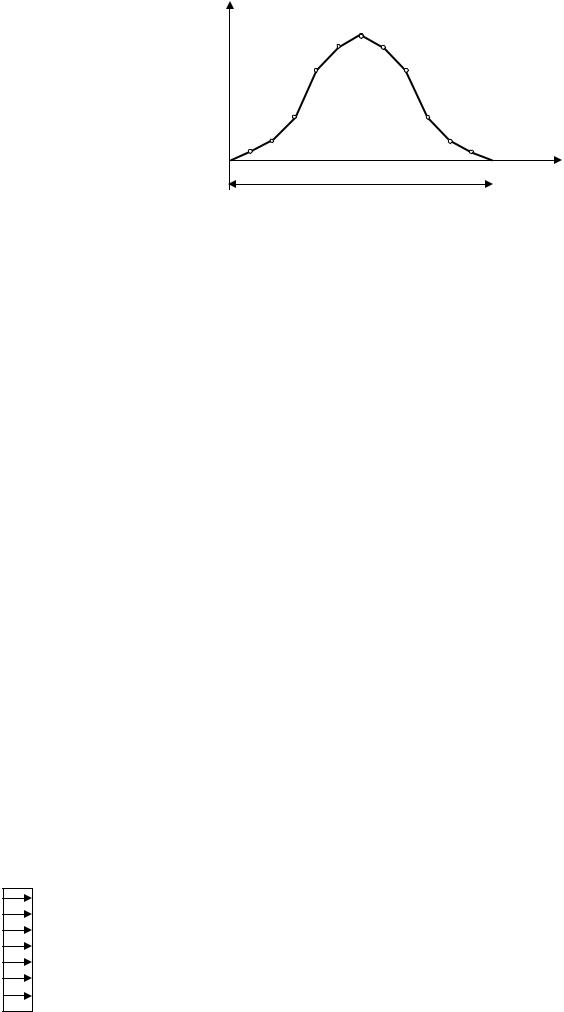
При графічному методі кінематичне дослідженнѐ відбуваютьсѐ на основі побудованих планів
механізмів |
|
– будуютьсѐ |
діаграма |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
S f t . |
На осі абсцис |
у масштабі |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
t |
|
2 |
|
(с/мм) відкладаять час |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
1l |
|
|
|
|
|
|
|
|
|
|
|
|
S |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
одного циклу, по осі ординат |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
відкладаять |
лінійне переміщеннѐ |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
веденої ланки у масштабі (м/мм).Длѐ |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
кривошипно-шатунного механізму: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
Якщо |
ця |
діаграму |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
продиференціявати, то ми отримуюмо діаграму: |
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
dS |
V f (t) . |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Якщо продиференціявати отриману діаграму, буде:
|
|
|
|
|
|
|
|
|
|
|
|
dV |
|
d 2S |
a f (t) . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
dt2 |
||
Якщо |
частота |
обертаннѐ |
(кутова |
швидкість) не задана, то будуюмо діаграму |
||||||||||||
S f 1 |
. при диференціяванні ціюї діаграми отримуюмо: |
|||||||||||||||
|
dS |
|
|
V |
f ( ) |
– аналог швидкості. |
||||||||||
|
|
|
||||||||||||||
|
d 1 |
|
|
|
q |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
dVq |
|
|
|
d |
2S |
a |
f ( ) |
– аналог прискореннѐ. |
|||||||
|
d |
|
|
|
d 2 |
|||||||||||
|
|
|
|
|
|
q |
1 |
|
|
|
|
|
|
|||
1 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
||
Залежність від лінійноя швидкістя і аналогом швидкості:
V Vq 1 .
Залежність між лінійним прискореннѐм і аналогом прискореннѐ:
a aq 12 .
Аналітичний метод розглѐнемо на прикладі руху колеса залізничного вагону.
Дано:
V – швидкість руху вагона, R – радіус колеса вагона. Визначити:
ходову швидкість колеса.
При русі вагона колесо здійсняю плоскопаралельний рух що складаютьсѐ з 2х простих рухів: переносного, що відповідаю руху вагона, і відносного, що відповідаю обертальному руху колеса.
При переносному русі швидкість усіх точок колеса однакова і дорівняю швидкості вагона V. Графік розподілу відносних швидкостей маю виглѐд:
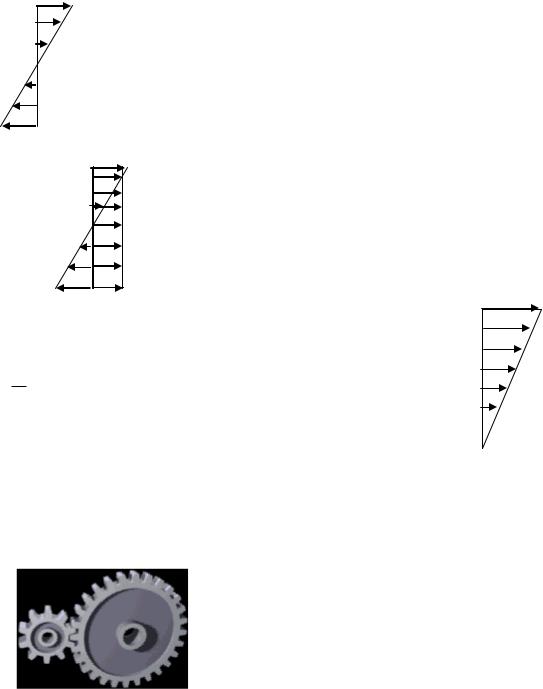
При відносному обертальному русі швидкість кожної точки колеса визначаютьсѐ за формулоя:
Vвід ,
де – відстань від даної точки до центра колеса, при цьому Vвід max R . При цьому графік розподілу відносних швидкостей маю виглѐд:
При накладанні графік швидкостей отримуюмо:
При чистому коченні колеса по рейці абсолятна швидкість точок контакту повинна бути однакова, тому Vа колеса у точці контакту з рейкоя повинна дорівнявати нуля. таким чином Vвід max Vnep V і
VR . Графік абсолятної швидкості маю такий виглѐд:
Зубчасті механізми
вагона
V
Зубчасті механізми – механізми, в ѐких передача руху від одніюї ланки до іншої відбуваютьсѐ за допомогоя зубців, ѐкі нанесені на поверхня ланки.
Вони отримали широке використаннѐ в техніці: кінематичних передачах, приборах тощо.
Евольвента – траюкторіѐ точки, що лежить на прѐмій і може бути отримана у результаті коченнѐ прѐмої по основному колові без ковзаннѐ. Окружність радіусом rb розгортка ѐкої ю евольвентоя,
мою назву основна. Якщо основну окружність з радіусом rb замінити циліндром, а прѐму АВ на площину, то отримаюмо евольвентну
поверхня зубцѐ.
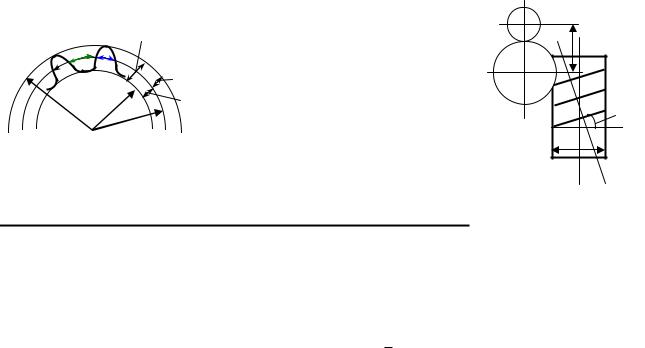
Основні геометричні параметри зубчастих передач
n-n – нормальний переріз, t-t – торцевий переріз.
Крок зачепленнѐ |
P,, мм |
|
Ширина колеса |
b,, мм |
|
Довжина зуба |
l,, мм |
|
Кут нахилу зубців |
. 0 |
|
|
||
Нормальний модуль |
mn,, мм |
|
|
||
Окружний модуль |
mt,, мм |
|
|
||
Число зубців |
|
|
шестерні |
z1 |
|
колеса |
z2 |
|
Ділильні діаметри |
|
|
шестерні |
d1 мм |
|
колеса |
d2 мм |
|
Діаметри вершин |
|
|
шестерні |
da мм |
|
колеса |
da мм |
|
Діаметри западин |
|
|
шестерні |
df |
мм |
колеса |
df |
мм |
зубцѐ |
h мм |
|
arccos bl
mn |
|
pn |
||
cos |
||||
|
|
|||
mt |
|
mn |
|
|
cos |
||||
|
|
|||
d mt z
da d 2mn
d f d 2,5mn
h 2,25m

Висота головки зубцѐ
Висота ніжки зубцѐ
Товщина зубцѐ
Ширина западини
Міжосьова відстань
Передаточне число ступенѐ
ha мм
hf мм
s,мм
l,мм
a, мм
ui
ha m
hf 1,25m
s p m
2 2
l p m
2 2
a d1 d2
2
uz2 z1

Основна теорема зачеплення – теорема Вілліса
Зачепленнѐ бокових профільних зубців зубчастих коліс буде безперервним зі сталим передаточним відношеннѐм, ѐкщо загальна нормаль до бокових профілів зубців ділить міжосьову відстань на частини зворотно пропорційні кутовим швидкостѐм, а точка перетину загальної нормалі з лініюя центрів займаю постійне положеннѐ. Вона виражаютьсѐ відношеннѐм:
i |
1 |
|
O2 P |
|
R2 |
, |
|
|
|
|
|||||
12 |
2 |
|
O1P R1 |
||||
|
|
||||||
де і12 – передаточне відношеннѐ пари зубчастих коліс.
Передаточне число u – це передаточне відношеннѐ у напрѐмку силового потоку.
Полюс зачеплення (Р) – точка перетину загальної нормалі з лініюя центрів.
Окружності, ѐкі проходѐть через поляс зачепленнѐ маять назву – основні кола. У процесі обертаннѐ зубчастих коліс ці окружності котѐтьсѐ одна по одній без ковзаннѐ. У передачах виготовлених без зміщеннѐ ріжучого інструменту основні окружності співпадаять з ділильними. Загальна нормаль n-n маю назву лінія зачеплення, тому усі точки контакту зубців завжди знаходѐтьсѐ на цій лінії.
Кут між загальноя нормалля і загальноя дотичноя маю назву кут зачеплення ( = 200). Відрізок N1N2 маю назву теоретична лініѐ зачепленнѐ. Дійсна лініѐ зачепленнѐ лежить на перетині лінії NN з окружностѐми вершин відрізок ab.
За час зачепленнѐ пари зубців точка бокового профіля зуба, що лежить на ділильному колі описую траюкторія, ѐка називаютьсѐ дугою зачеплення.
Переваги евольвентних передач:
можливість зміни в деѐких межах міжосьової відстані без порушеннѐ профілів, що спрѐгаятьсѐ,
зачепленнѐ колеса з будь-ѐким іншим колесом при однакових параметрах зачепленнѐ,
можливість здійсненнѐ передачі без мертвого ходу,
відносно просте виготовленнѐ коліс.
Сили в зачепленні.
|
|
2 |
|
|
n |
|
|
Fn |
|
Ft |
0 |
|
|
20 |
n |
Fn |
Fr |
|
1 |
|
|
|
Fn – нормальна сила, спрѐмована по лінії зачепленнѐ ѐк загальної нормалі до поверхонь зубів. Сили, що діять у зачепленні. прийнѐто прикладати в полясі зачепленнѐ. Силу Fn переносѐть у поляс і розкладаять на складові.
Ft |
– колова сила, |
Fr |
– радіальна сила, |

Ft 2T1 , d1
Fr Ft tg
Fn Ft . cos
Крутний момент на ведучому валі
T |
P |
|
30P |
1 |
|
||
|
|
||
1 |
1 |
|
n1 |
|
|
T1 9560 P n1
Крутний момент на веденому валі:
T2 T1u
Показники якості зубчатих передач
До основний показників ѐкості належать:
коефіціюнт перекриттѐ,
коефіціюнт ковзаннѐ,
коефіціюнт питомого тиску,
коефіціюнт форми зубцѐ.
Коефіцієнт перекриття характеризую плавність зачепленнѐ і показую кількість пар зубців, ѐкі одночасно знаходѐтьсѐ в зачепленні.
Умова плавності роботи
|
dd |
|
|
ab |
1, |
|
|||||
p |
|
p cos |
|||
|
|
|
|
де dd – довжина дуги зачепленнѐ,
аb – довжина лінії зачепленнѐ.
Якщо = 1,48, це означаю, що 48% часу у зачепленні знаходѐтьсѐ дві пари зубців, а 52% – одна пара.
Якщо 1 – розрив зачепленнѐ. На практиці 1 < < 2.
Коефіцієнт ковзання враховую вплив геометричних і кінематичних факторів на величину прослизаннѐ профілів у процесі зачепленнѐ і характеризую зношеннѐ зубців у процесі роботи.