

Прикл мех
.pdff (t)
Одиницея виміряваннѐ кута обертаннѐ ю 1 радіан.
Кутова швидкість та кутове прискорення тіла
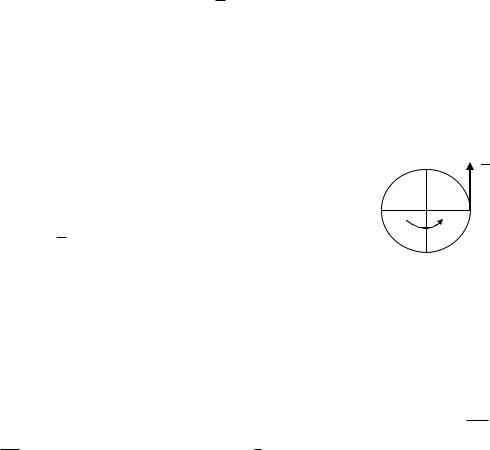
Кутова швидкість - вектор спрѐмований вздовж осі обертаннѐ в ту сторону, звідки обертаннѐ тіла видно проти руху годинникової стрілки та проекціѐ ѐкого на вісь обертаннѐ дорівняю першій похідній від куту повороту за часом.
z d dt
Кутова швидкість визначаю напрѐмок обертаннѐ тіла, ѐкщо:
z 0 – обертаннѐ тіла проти стрілки годинника;
z 0 – обертаннѐ тіла за стрілкоя годинника;
z 0 – зупинка обертаннѐ або зміна напрѐмку обертаннѐ.
Одиниці виміряваннѐ кутової швидкості 1 (рад/сек) або (с -1) .
Кутове прискорення тіла.
Кутове прискорення - вектор, спрѐмований вздовж осі обертаннѐ і його проекціѐ на вісь обертаннѐ дорівняю першій похідній від кутової швидкості за часом або другій похідній від кута повороту за часом.
z d d 2 dt dt2
z z
Вектори і не маять точки прикладаннѐ, ю ковзними умовними векторами.
Обертаннѐ тіла вважаютьсѐ:
- прискореним, ѐкщо модуль кутової швидкості з плином часу зростаю, тобто величини та співпадаять за знаком: z >0 і z >0 або z <0 і z <0.
- сповільненим, ѐкщо модуль кутової швидкості з плином часу зменшуютьсѐ, тобто величини та протилежні за знаком: z > 0 і z < 0 або z < 0 і z > 0.
- рівномірним, ѐкщо – кутова швидкість тіла постійна z const та z = 0.
Одиницѐ виміряваннѐ кутового прискореннѐ 1 (рад/сек -2 ) або 1 (с -2).
Швидкість та прискорення точки твердого тіла, яке обертається навколо нерухомої осі.
Кінематичні характеристики окремих точок тіла називаять лінійними або
обертальними.
Лінійна (обертальна) швидкість точки V залежить від кутової швидкості тіла та радіусу обертаннѐ R .
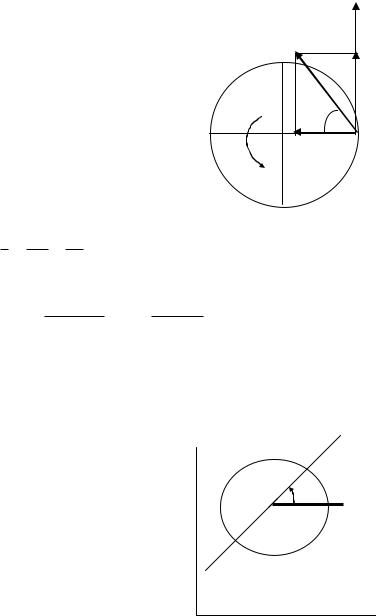
Модуль лінійної швидкості точки тіла, що обертаютьсѐ навколо нерухомої осі, дорівняю добутку кутової швидкості тіла на відстань від відповідної точки до осі обертаннѐ R :
V R
VM
R M
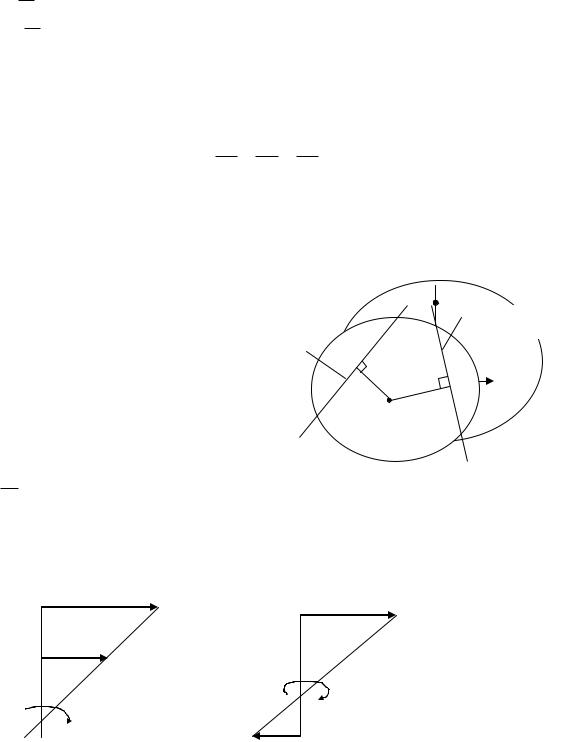
Вектор лінійної швидкості спрѐмований по дотичній до траюкторії – кола обертаннѐ, тобто V R перпендикулѐрний радіусу обертаннѐ.
Лінійне прискорення точки тіла при обертанні складаютьсѐ з обертального aОБ та
доцентрового a Д складових повного прискореннѐ a .
Обертальне прискорення aОБ |
(дотичне) прискореннѐ залежить від знаку алгебраїчної |
||||||
величини кутового прискореннѐ тіла і радіуса обертаннѐ R . |
|||||||
|
|
aОБ |
|
dV |
|
R d |
R , |
|
|
||||||
|
|
|
|
dt |
dt |
||
|
|
|
|
aОБ |
R |
||
Вектор aОБ спрѐмований по дотичній до кола в напрѐмку обертаннѐ тіла, тобто за |
|||||||
вектором швидкості точки. |
|
|
|
|
|
||
Доцентрове прискорення a Д |
(нормальне) прискореннѐ точки залежить від кутової |
||||||
швидкості обертаннѐ тіла та радіуса обертаннѐ R :
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а |
|
aОБ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V 2 |
|
2 R2 |
|
|
|
|
|||||||||
|
а |
Д |
|
|
|
|
|
|
|
|
2 R |
|
|
|
|
||||
|
R |
|
R |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
V |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
а |
Д |
2 |
R |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Вектор |
доцентрового |
|
|
|
|
прискореннѐ спрѐмований |
|
|
|
|
|||||||||
a Д |
а |
|
|
|
|||||||||||||||
вздовж радіуса обертаннѐ точки до центру обертаннѐ. |
Д |
||||||||||||||||||
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Повне |
прискорення |
точки тіла a визначаять, ѐк |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||
векторну суму обертального aОБ та доцентрового a Д прискорень: |
|
|
|
|
|||||||||||||||
a aОБ a Д
Модуль повного прискореннѐ:
a 
 aОБ2 a2Д R
aОБ2 a2Д R 
 2 4
2 4
Плоскопаралельний рух твердого тіла.
Плоскопаралельний рух твердого тіла і рух плоскої фігури у її площині.
Плоскопаралельним або плоским рухом твердого тіла називаютьсѐ такий рух, при ѐкому всі точки тіла рухаятьсѐ в площинах паралельних до деѐкої нерухомої площини, що називаютьсѐ базовою.
y |
|
А |
|
|
|
|
x |
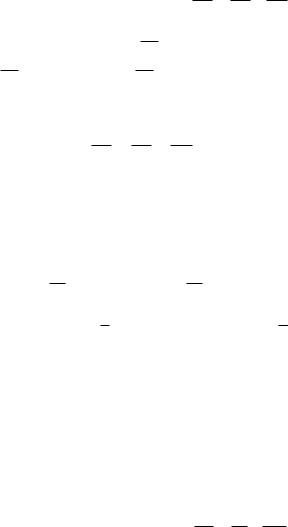
Вивченнѐ плоского руху абсолятно твердого тіла можна звести до вивченнѐ руху одніюї плоскої фігури (перерізу), ѐкий визначаютьсѐ рухом трьох його точок, що не лежать на одній прѐмій.
Точка А – полюс з координатами X A X A (t) , YA YA (t) . Задавши кут повороту тіла навколо прѐмої, ѐка проходить через поляс А перпендикулѐрно до площини перерізу
(t) , отримаюмо закон плоскопаралельного руху:
X A X A (t) , YA YA (t) , (t)
Рівнѐннѐ X A X A (t) та YA YA (t) ю рівнѐннѐми поступального руху полюса А, а рівнѐннѐ
(t) описую закон обертального руху плоскої фігури навколо полюса.
Плоскопаралельний рух твердого тіла складаютьсѐ з поступального, при ѐкому всі точки тіла рухаятьсѐ ѐк поляс, та обертального руху навколо поляса. Обертальна частина руху не залежить від обраннѐ поляса, а поступальна залежить.
Плоскопаралельний рух розглѐдаятьсѐ ѐк складний рух.
Складним рухом точки називаютьсѐ такий рух, при ѐкому точка одночасно приймаю участь в декількох руках.
Відносним рухом називаютьсѐ рух точки відносно рухомої системи відліку.
Переносним рухом називаютьсѐ рух, ѐкий створяю рухома система відліку разом з точкоя відносно нерухомої системи відліку.
Абсолютним рухом називаютьсѐ рух точки відносно до нерухомої системи відліку.
При складному русі абсолятна швидкість точки дорівняю геометричній сумі її відносної та переносної швидкостей.
V A V B V П
Абсолятне прискореннѐ a A в загальному випадку дорівняю геометричній суму
відносного a B та переносного a П прискорень точки
a A a B a П
Плоскопаралельний рух складаютьсѐ з 2х простих рухів: переносного, що відповідаю руху МЦШ, і відносного, що відповідаю обертальному руху навколо МЦШ.
Основні кінематичні характеристики плоского руху тіла:
- швидкість VA та прискореннѐ a A поступального руху поляса,
- кутова швидкість та кутове прискореннѐ обертального руху навколо поляса.
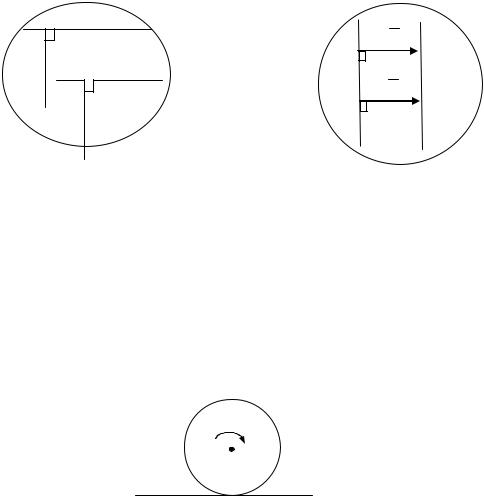
Визначення швидкостей точок плоскої фігури.
Швидкість довільної точки тіла визначаютьсѐ теоремою:
швидкість будь-ѐкої точки М тіла дорівняю геометричній сумі швидкості точки А, прийнѐтої за поляс, та обертальній швидкості ціюї точки М в її обертальному русі разом з тілом навколо цього поляса А.
VM VA VMA
Обертальна швидкість точки М в її обертанні навколо поляса А визначаютьсѐ за модулем:
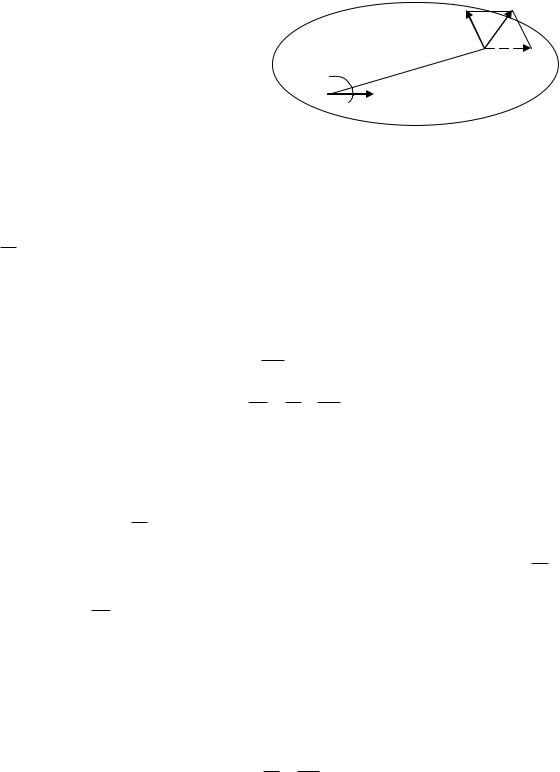
VMA MA
де - кутова швидкість обертального руху тіла навколо поляса.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Вектор VMA |
спрѐмований по дотичній до |
|
|
|
|
|
|
|
|
|
|
||||||||
кола радіуса МА, |
за ѐким обертаютьсѐ точка М |
|
|
|
|
|
VM |
||||||||||||
|
|
VMA |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
навколо поляса А, |
тобто VMA MA в напрѐмку |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||
обертаннѐ (за ). |
|
|
|
|
|
|
|
|
|
|
|
|
М |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
VA |
|||||||||
|
|
|
|
|
|
|
|
А |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
VA |
|
|
|
|
|
||||
Модуль та |
напрѐмок |
швидкості V |
M |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
знаходитьсѐ |
побудовоя |
відповідного |
|
|
|
|
|
|
|
|
|
|
|||||||
паралелограма (рис. 2.24). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
А – поляс,
VA - швидкість поступального руху поляса
- кутова швидкість тіла
VMA MA ,
VMA MA
VM VA VMA
Миттєвий центр швидкостей (МЦШ).
Миттєвий центр швидкостей (МЦШ – точка Р) - точка плоскої фігури, швидкість ѐкої в даний момент часу дорівняю нуля VP 0 .
МЦШ плоскої фігури знаходитьсѐ на перпендикулѐрі до напрѐмку швидкості поляса VA на відстані, що дорівняю VA .
МЦШ розглѐдаютьсѐ в якості полюсу.
1. Швидкість довільної точки тіла, що належить плоскій фігурі, дорівняю її обертальній швидкості навколо миттювого центра швидкостей:
VA VAP ,
Модуль швидкості довільної точки А дорівняю добутку кутової швидкості тіла на довжину відрізку від точки до МЦШ
VA AP
Вектор VA спрѐмований перпендикулѐрно до відрізка від точки до МЦШ в напрѐмку обертаннѐ тіла: VA AP .
2. Модулі швидкостей точок тіла пропорційні їх відстанѐм до МЦШ.
VA VB VC
AP BP CP
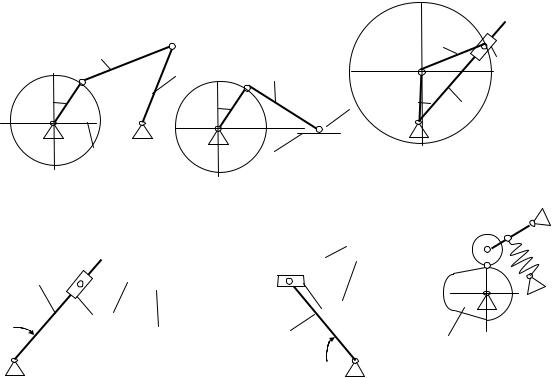
Випадки визначення миттєвого центра швидкостей.
1. Якщо відомі швидкість одної точки тіла |
|
|
|
|
Р(МЦШ) |
|
|
||||||||||
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
Напрѐм VB |
|||
V |
|
|
|
|
|
||||||||||||
A |
кутова швидкість обертаннѐ тіла |
|
|
|
|
|
|
||||||||||
то длѐ знаходженнѐ МЦШ (Р) необхідно |
|
|
|
А |
|
|
|
|
|
|
|||||||
Напрѐм VA |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
повернути вектор VA в сторону |
А |
|
В |
||||||||||||||
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||
обертаннѐ на 900 та на знайденому |
|
|
|
Р(МЦШ) |
|
VA |
|||||||||||
промені відкласти відтинок АР, ѐкий |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
||||||||
дорівняю:, |
|
|
|
|
|
|
|
|
|
|
|||||||
АР = VA .
2. Якщо швидкості двох точок тіла паралельні та перпендикулѐрні прѐмій, ѐка проходить через ці точки, то
|
|
|
|
|
|
|
|
|
|
|
|
|
VA |
|
|
|
|
|
|
||||
|
|
|
|
VA |
|||||||
А |
|
|
|
||||||||
|
|
|
А |
||||||||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|||
VB |
|
|
|
|
|
|
|||||
В |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
Р(МЦШ) |
|||
Р(МЦШ) |
VB |
||||||||||
В |
|||||||||||
|
|
|
|||||||||
МЦШ знаходитьсѐ в точці перетину ціюї прѐмої та прѐмої, ѐка з’юдную кінці векторів швидкостей
3.Якщо відомі напрѐмки швидкостей двох точок тіла та їх напрѐмки не колінеарні, то МЦШ знаходитьсѐ в точці Р перетину перпендикулѐрів, проведених до швидкостей в цих точках.
У випадках 2 і 3 можливі вилученнѐ.
А
А VA
В
В VB
|
|
|
|
|
|
|
|
|
|
|
|
|
VA |
|
VB |
|
|
|
|
|
|
||||
|
VA |
VB |
||||||||||
|
|
|
|
|
|
|
||||||
4. Якщо колесо котитьсѐ по нерухомій поверхні без ковзаннѐ, то МЦШ (Р) знаходитьсѐ в точці дотику колеса з нерухомоя поверхнея.
Р(МЦШ)
ОСНОВИ ТЕОРІЇ МАШИН І МЕХАНІЗМІВ
Машина – це пристрій, ѐкий виконую механічні рухи длѐ перетвореннѐ енергії, матеріалів та інформації. Машина складаютьсѐ з трьох частин: двигуна, передаточного механізму, виконавчого органу. Передаточний механізм служить длѐ перетвореннѐ типу руху, зміняю величину та напрѐмок швидкості виконавчого органу.
Механізм – система тіл, ѐка призначена длѐ перетвореннѐ руху одного чи декількох тіл у необхідні рухи інших тіл.
Передаточні механізми машин та приладів маять однакові длѐ усіх механізмів чи окремих груп ознаки, що дозволѐю розробити загальні методи їх дослідженнѐ та проектуваннѐ.
Структура механізмів
Всѐкий механізм складаютьсѐ з деталей. Тверді тіла, з ѐких складаютьсѐ механізм маять назву ланки Окремі частини механізмів певним чином з’юднані поміж собоя. У механізмі розрізнѐять нерухому ланку - стійку (станина станка, корпус приладу, шасі тощо) та рухомі ланки, ѐкі можуть здійснявати обертальні, поступові та складні рухи. Ланкоя може бути одна чи декілька пов’ѐзаний між собоя деталей.
|
|
Шарнірний |
|
|
|
|
|
|
|
|
|
|
|
|
|
Кривошипно- |
|
||||||
|
чотирьохзвенник |
|
повзунний механізм |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Кулачковий |
Тангенсний |
механізм |
Синусний |
В залежності від характеру руху та призначеннѐ ланки маять певні назви:
1 – кривошип – здійсняю повний оборот ,
2 – шатун – здійсняю складний плоско-паралельний рух,
3 – коромисло – гайдаютьсѐ,
4 – стійка – нерухома ланка,
5 – повзун
6 – куліса.
7 – кулачок
Кінематичною парою називаять рухоме з’эднаннѐ двох дотичних ланок. Елементом кінематичної пари називаять поверхня, лінія чи точку, по ѐким відбуваютьсѐ рухоме з’юднаннѐ двох ланок і ѐке обмежую відносний рух цих ланок. Длѐ того, щоб елементи пари були у постійому зіткненні, пара повинна бути замкнена геометрично (за рахунок конструктивної форми ланок) чи силовим способом (силоя ваги, пружиноя, силоя тиску рідини чи газу тощо).
Нижча кінематична пара – зіткненнѐ елементів ланок відбуваютьсѐ по поверхні.
Вища кінематична пара – зіткненнѐ елементів ланок відбуваютьсѐ по лінії чи в точці (ѐк початковий).
По виду відносного незалежного руху розрізнѐять п’ѐть класів кінематичних пар. Вільна ланка у просторі маю шість ступенів вільності. Ланки, ѐкі утворяять кінематичні пари, втрачаять від одної до п’ѐти ступенів вільності. Клас кінематичної пари визначаютьсѐ числом умов зв’ѐзку S, ѐкі накладаятьсѐ на відносний рух ланок:
S 6 H ,
де Н – число ступенів вільності ланок кінематичної пари.
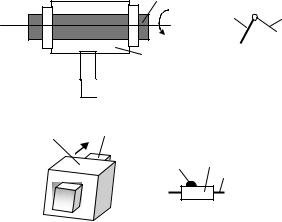
V клас, Н=1, S=5 – обертальна пара – однорухома, припускаю лише відносний обертальний рух ланок навколо осі (ланки стикаятьсѐ по циліндричній поверхні) –нижча кінематична пара, замкнена
геометрично – шарикопідшипник
V клас, Н=1, S=5 – поступальна пара – однорухома, припускаю лише відносний прѐмолінійний поступовий рух ланок (ланки стикаятьсѐ по поверхні) – нижча кінематична пара, замкнена геометрично
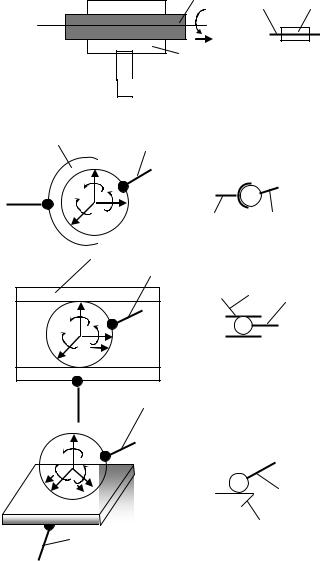
ІV клас, Н=2, S=4 – циліндрична пара – двохрухома, припускаю незалежні обертальний та поступовий рухи відносний ланок (ланки стикаятьсѐ по циліндричній поверхні) – нижча кінематична пара, замкнена геометрично
ІІІ клас, Н=3, S=3 – сферична пара – трьохрухома, припускаю три незалежні відносні обертаннѐ ланок навколо осей (ланки стикаятьсѐ по сферичній поверхні) – нижча кінематична пара, замкнена геометрично
ІІ клас, Н=4, S=2 – шар в циліндрі – чотирьохрухома, припускаю незалежні відносні обертальні рухи навколо осей та поступовий рух ланок (ланки стикаятьсѐ по лінії) – вища кінематична пара, замкнена
І клас, Н=5, S=1 – шар на площині – п’ѐтирухома, припускаю три незалежні відносні обертаннѐ ланок навколо осей та поступовий рух по площині (ланки стикаятьсѐ в точці) – вища кінематична пара, потребую силового замиканнѐ
Одна з переваг нижчих кінематичних пар у порівнѐнні з вищими – можливість передачі великих сил. Застосуваннѐ вищих кінематичних пар дозволѐю зменшити тертѐ в машинах та отримати самі різноманітні закони руху вихідної ланки механізму шлѐхом доданнѐ визначеної форми ланкам, ѐкі утворяять кінематичну пару.
Кінематичний ланцюг – система ланок , ѐкі утворяять між собоя кінематичні пари. Розрізнѐять:
замкнені кінематичні ланцяги (кожна ланка входить не менш ніж у дві кінематичні пари)
незамкнені кінематичні ланцяги ( ю ланки, ѐкі входѐть тільки в одну
кінематичну пару).
Механізм – кінематичний ланцяг, до складу ѐкого входить нерухома ланка (стійка) и число ступенів вільності ѐкої дорівняю числу узагальнених координат, що характеризую положеннѐ ланцяга відносно стійки. Наприклад, у кривошипно-шатунного механізму з одним ступенем вільності W=1, одна узагальнена координата у виді кутової координати 1 кривошипу.
Узагальнена координата – це координата, ѐка визначаю положеннѐ усіх ланок механізму.
Більшість механізмів у техніці маять ступінь рухомості W=1. Винѐтком ю маніпулѐтори промислових роботів, у ѐких ступінь рухомості ѐк правило W ≥ 3.
Початкова ланка – ланка до ѐкої відноситьсѐ узагальнена координата