

Прикл мех
.pdfнавантажуять до значної напруги l |
длѐ того, щоб він зруйнувавсѐ при порівнѐно |
|||||||
невеликому числі |
N1 |
об о ротів (циклів). |
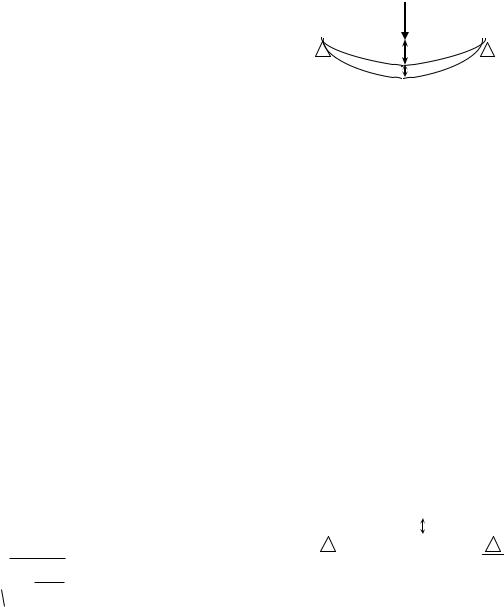
Починаять побудову діаграми в координатах: |
|||||
напруженнѐ — число |
циклів, наносѐть |
точку |
А з абсцисоя NI і |
ординатоя 1. Потім |
||||
іспитуять другий зразок, створяячи |
декілька |
менше напруженнѐ 2. Він |
||||||
зруйнуютьсѐ при більшому числі N2. На діаграму наносѐть точку В с координатами 2, N2. |
||||||||
Потім випробуять |
наступні зразки, |
поступово змен шуя чи |
н апружен н ѐ . Вони |
|||||
зруйнуятьсѐ при більшим числі циклів. |
|
|
|
|
|
|||
Відклавши ці точки, одержимо криву ABCD(крива втоми, крива Велора) діаграма |
||||||||
характерна тим, |
що, |
починаячи |
з |
деѐкої напруженнѐ, |
крива йде |
практично |
||
горизонтально (ділѐнку CD). Це означаю, що при певному напруженні зразок |
може, не |
|||||||
руйнуячи, витримати нескінчено велике |
число |
циклів. |
|
|
|
|||
Найбільша величина періодично змінного напруженнѐ, ѐкому матеріал може опиратисѐ без руйнуваннѐ необмежено довго, називаютьсѐ границею витривалості (утоми)
Границѐ витривалості при симетричному циклі позначаютьсѐ символом –1, при пульсуячому циклі — 0, при циклі з характеристикоя г— r.
Практично, ѐк показую досвід, сталевий зразок, що витримав 107 циклом (це число називаютьсѐ базовим числом циклів), може них витримати необмежено більше.
–1 – границѐ витривалості при згині
–1р – границѐ витривалості при розтѐзі
–1 – границѐ витривалості при крученні
/–1 – границѐ витривалості при зсуві
Розглѐнемо роботу вала, на ѐкий насаджені зубчасті колеса чи шківи пасових передач. Внаслідок обертаннѐ валу напруженнѐ згину у різних точках його поперечного перерізу зміняятьсѐ по симетричному циклу, навіть при постійному навантаженні (винѐтком ю ті випадки, коли навантаженнѐ обертаютьсѐ разом з валом).
Напруженнѐ крутіннѐ зміняятьсѐ пропорційно зміні навантаженнѐ. У більшості випадків важко встановити дійсний цикл навантаженнѐ машини в умовах експлуатації. Тоді розрахунок виконуять по номінальному навантаження, а цикли приймаять:
при згині |
– симетричний, |
при крутінні – віднульовий. |
Вибір віднульового циклу длѐ напружень крутіннѐ обґрунтовуютьсѐ тим, що більшість машин працяю зі змінним крутним моментом, а знак моменту зміняютьсѐ тільки у реверсивних машин. Неточність такого приблизного розрахунку компенсуютьсѐ при виборі запасів міцності.

Розрахунок на опір втоми
Запас опору утоми:
|
|
|
|
|
|
|
|
|
s |
|
s |
s |
|
s 1,5, |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
s 2 |
s 2 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
|
|
|
|
|
|
|||||
де |
|
|
1 |
|
– запас опору утоми по вигині, |
|||||||||
a K |
|
m |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
Kd KF |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
1 |
|
– запас опору утоми по крутіння, |
||||||||
|
|
a K |
|
m |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
Kd KF |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
де 1 0,4 0,5 в 400 МПа – границѐ витривалості при згині,
|
|
1 |
200 МПа – границѐ витривалості при крутінні, |
|
|
|
|
|
|
|
|
|
|
|
|
a |
– амплітуда циклів напружень при згині (перемінна складового циклу), a |
u , |
|
||||
m – середне напруженнѐ циклу (постійна складового циклу), m =0, |
|
|
|
|
|||
|
a – амплітуда циклів напружень при крутінні (перемінна складового циклу), a |
|
|
, |
|||
|
|
|
|
|
|
2 |
|
m – середне напруженнѐ циклу (постійна складового циклу), m 2 ,
, – коефіціюнти, що коректуять вплив постійної складового циклу напружень по опору утоми,
K – коефіціюнт концентрації напружень при згині, що залежить від концентратора напружень,
K |
– коефіціюнт концентрації напружень при крутінні, що залежить від концентратора |
напружень, |
|
K d – масштабний фактор, |
|
K F |
– фактор шорсткості поверхні. |
Фактори, що впливають на границю витривалості
1)Концентраціѐ навантажень.
2)Абсолятні розміри (чим більші розміри, тим менше границѐ витривалості)
3)Якість поверхні(погана обробка знижую границя витривалості)
Шляхи підвищення границі витривалості
Длѐ підвищеннѐ границі витривалості застосовуять конструктивні та технологічні засоби.
Конструктивні засоби:
1)Отвори необхідно розташовувати у зоні мінімальних напружень (навантаженнѐ).
2)У зоні різкої зміни поперечного перерізу необхідно мати плані переходи.
Технологічні засоби:
1)Підвищеннѐ чистоти обробки поверхні, особливо у зоні концентрації напружень.
2)Дробіструйна обробка металів.
3)Накатуваннѐ деталей спеціальним роликом.
Визначення напружень при коливаннях та дії ударного навантаження
Напруженнѐ, ѐкі виникаять при коливаннѐх деталей, можуть в багато разів перевищувати за своюя величиноя напруженнѐ від дії статичного навантаженнѐ.
Розрахунок деталей на динамічне навантаженнѐ складніше, ніж розрахунок на статичне навантаженнѐ (більш складні методи визначеннѐ внутрішніх зусиль та напружень, визначеннѐ механічних властивостей матеріалів при динамічних навантаженнѐх – пластичні матеріали можуть працявати ѐк крихкі).
При дії миттювого навантаженнѐ балка починаю коливатисѐ. При цьому максимальна дефомаціѐ:
д cm ya , |
|
|
|
|
ст |
|
|||
де |
ст – статичний прогин балки в місці удару, |
|
|
|
ya |
|
|||
|
|
|
||
ya – динамічний прогин (максимальна амплітуда коливань).
Перейдемо від деформацій до напружень:
|
|
|
|
|
|
|
ya |
|
|
|
|
|
д |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
cm 1 |
|
, |
||
|
|
|
|
|
|
|
cm |
|
K |
д |
1 |
ya |
– динамічний коефіціюнт. |
|
|
|
|
|
|
|
|
|
||||
|
cm |
|
|
|
|
|
||
|
|
|
|
|
|
|
||
д cmKд .
Длѐ визначеннѐ динамічного коефіціюнту треба знати максимальну амплітуду коливань. Вона знаходитьсѐ вирішеннѐм диференційного рівнѐннѐ коливань.
Найбільшу небезпеку ю коливаннѐ, коли частота власних коливань співпадаю з частотоя амплітудних коливань. Це ѐвище маю назву – резонанс (длѐ запобіганнѐ під опори підставлѐять пружини або ресори). Амплітуда коливань може досѐгнути нескінченості.
Якщо розглѐнути випадок, коли вантаж падаю на балку з |
ст |
|
|
h |
|
|
|||
деѐкої висоти, то в цьому разі динамічний коефіціюнт дорівняю: |
|
|
Kд 1 
 1 2h .
1 2h .
cm
КІНЕМАТИКА Кінематика точки.
Способи завдання руху точки. Траєкторія руху точки.
Задати спосіб описання руху точки означаю встановити сукупність таких параметрів, за допомогоя ѐких можна однозначно встановити положеннѐ точки в просторі в будь – ѐкий момент часу відносно обраної системи відліку.
Траєкторія руху – це лініѐ, ѐку описую рухома точка відносно обраної системи відліку. За виглѐдом траюкторії можна охарактеризувати вид руху точки.
1.Якщо, траюкторіѐ руху точки прѐма лініѐ, рух називаютьсѐ прямолінійний.
2.Якщо, траюкторіѐ руху точки крива лініѐ, рух називаютьсѐ криволінійний.
Длѐ завданнѐ руху точки існую 3 способи: 1. векторний;
2.координатний;
3.натуральний.
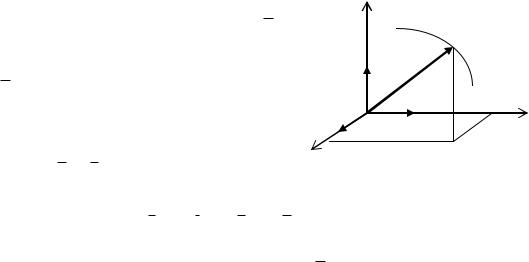
Векторний спосіб завдання руху точки.
Положеннѐ точки в будь - ѐкий момент часу
можна визначити за допомогоя вектору r , проведеного з початку відліку О в рухому точку М.
Вектор r називаютьсѐ радіус – вектор точки М – вектор проведений із нерухомої точки простору в рухому.
Закон руху точки в векторній формі.
r r(t)
z
|
|
r |
|
|
|
||
|
|
|
|
|
r |
|
|
|
k |
|
|
|
|||
|
|
|
|
|
j |
y |
|
|
i |
||||||
|
|
|
r |
||||
x |
|
|
|||||
|
|
|
|||||
r
Відносно координатних осей рівнѐннѐ руху точки в векторній формі: r x i y j z k
Геометричне місце кінцевих точок радіус-вектора r - годограф цього вектора – визначаю траєкторію руху точки.
Координатний спосіб завдання руху точки.
Визначення траєкторії точки.
Закон руху точки при координатному способі завдання руху в декартовії системі відліку (можна обрати будь-ѐку систему координат, наприклад, полѐрну, сферичну і т. і.)
x f1 (t) , y f2 (t) , z f3 (t)
Рівнѐннѐ руху ѐвлѐять собоя одночасно рівняння траєкторії точки в параметричній формі, де параметром ю час t .
Натуральний спосіб завдання руху точки.
Длѐ завдання руху точки натуральним способом треба знати:
1.траюкторія точки (АВ);
2.початок відліку дугової координати на траюкторії (т. О);
3.додатній та від’юмний напрѐмок відліку дугової координати( );
4. закон руху точки вздовж траюкторії s f (t) . |
A |
O O |
|
|
Положеннѐ точки М на траюкторії АВ буде однозначно |
|
|
||
|
|
+ |
||
встановлено в кожний момент часу криволінійною (дуговою) |
|
|
||
|
|
|
|
|
координатою s =ОМ – відстань від нерухомої точки О до точки М |
|
s |
|
M |
|
|
|||
вздовж дуги траюкторії з відповідним знаком. |
|
|
||
|
|
|
|
|
Закон руху точки вздовж траюкторії: |
|
|
|
B |
|
|
|
||
s f (t)
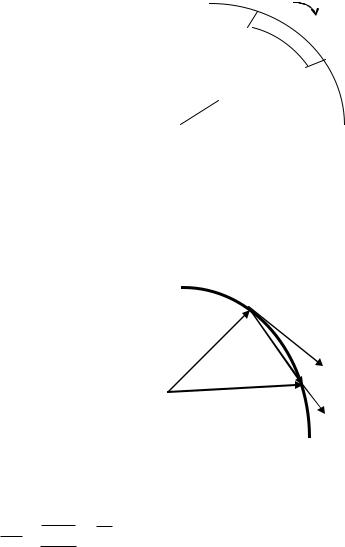
Швидкість точки.
Швидкість точки – одна з основних кінематичних характеристик руху, векторна величина, що характеризую бистроту та напрѐмок руху точки в даній системі відліку.
Кожному положення точки М і М1 |
в моменти часу t і t1 |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
М |
|
|
|
|
|
|
відповідаю належне значеннѐ радіус-вектора r(t) та r1 (t1 ) , тоді |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
||||||||
t t1 t . |
|
|
|
|
r t |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
V |
||||||||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
за проміжок часу t |
|
|
М1 |
||||||||
Вектор переміщення точки MM1 |
|
|
||||||||||||
|
|
|
|
|
|
|
||||||||
спрѐмовано за хордою, |
|
|
|
|
|
t1 |
|
|
|
|
|
|
||
|
|
|
|
r1 |
|
|
Vcp |
|||||||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
Середньою швидкістю точки називаютьсѐ векторна величина, ѐка дорівняю відношення вектора переміщеннѐ точки до відповідного проміжку часу:
VСР MM1 r
t t
Напрѐмок вектору VCP співпадаю з вектором переміщеннѐ MM1 .
Швидкість точки в даний момент часу – це векторна величина, ѐка дорівняю першій похідній від радіуса-вектора точки за часом:
V ddtr r
Вектор швидкості точки в даний момент часу спрѐмований по дотичній до траєкторії точки в сторону руху .
Одиницея виміряваннѐ швидкості ю 1 м/с.
Визначення швидкості за проекціями на осі координат.
При координатному способі завданнѐ руху точки проекції швидкості на осі координат визначаятьсѐ ѐк перші похідні від належних координат точки за часом:
V |
dx |
x , |
V |
|
|
dy |
y , |
V |
dz |
z |
|
y |
|
|
|||||||
x |
dt |
|
|
|
dt |
|
z |
dt |
|
|
|
|
|
|
|
|
|
|
Модуль вектора швидкості дорівняю:
V 
 Vx2 Vy2 Vz2
Vx2 Vy2 Vz2
Напрѐмок вектора швидкості:
|
|
|
V |
|
|
|
|
|
Vy |
|
|
|
|
V |
|
cos(V ,i) |
x |
, |
cos(V , j) |
, |
cos(V ,k) |
z |
|||||||||
|
|
|
|
|
|||||||||||
|
|
|
V |
|
|
|
V |
|
|
|
|
V |
|||
Визначення швидкості точки при натуральному способі завдання руху точки.
Алгебраїчна (чисельна) величина швидкості точки в даний момент часу дорівняю першій похідній від переміщеннѐ (дугової координати) точки за часом:
V dsdt s
Алгебраїчна (чисельна) величина швидкості визначаю одночасно і модуль вектора швидкості і сторону, в ѐку він спрѐмований (за знаком похідної).
Шлѐх, пройдений точкоя за проміжок часу t1, t2 , розраховуютьсѐ за допомогоя
інтегралу
t2
S s dt .
t1
Дугову координату s(t) не слід ототожнявати з довжиноя шлѐху.
Прискорення точки.
Прискоренням точки в даний момент часу називаятьсѐ першу похідну швидкості за часом або другу похудну радіуса-вектора точки за часом

|
|
|
|
|
|
|
|
|
|
|
dV |
|
|
d 2 r |
|
||
a |
|
|||||||
dt |
|
dt 2 |
|
|||||
|
|
|
|
|
||||
a V r
При координатному способі завдання руху точки проекції вектора прискореннѐ точки в даний момент часу визначаятьсѐ ѐк перші похідні від проекцій швидкості або другі похідні від координат точки за часом:
ax |
dV |
x |
|
d 2 x |
, ay |
|
dVy |
|
d 2 y |
, az |
|
dV |
z |
|
d 2 z |
|
|
|
|
|||||||||||||||||||
dt |
|
dt |
2 |
|
|
dt |
dt 2 |
|
|
dt |
|
dt 2 |
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
ax Vx x , ay Vy y , az Vz z |
|
|
|
|||||||||||||||||||||||||||||
Модуль вектора прискореннѐ дорівняю: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a a2 |
a |
2 a2 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
y |
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
||||
Напрѐмок прискореннѐ: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
ay |
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
cos(a,i) |
x |
, |
cos(a j) |
|
, |
|
cos(a,k) |
z |
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
a |
|
a |
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Одиниці виміряваннѐ прискореннѐ 1 м/с2. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
Дотичне та нормальне прискорення. |
||||||||||||||||||||||||||||||||||
Дотичним |
|
(тангенціальним) |
прискоренням |
|
|
a |
|
|
точки |
|
називаютьсѐ проекціѐ |
|||||||||||||||||||||||||||
прискореннѐ точки на дотичну до траюкторії, тобто на вектор швидкості.
Дотичне прискореннѐ дорівняю першій похідній від алгебраїчної величини швидкості або другій похідній від дугової координати s за часом:
a dV |
d 2 s |
||
|
dt |
|
dt 2 |
|
|
||
a V s
Дотичне прискореннѐ характеризую зміну швидкості точки за величиною. Значеннѐ дотичного прискореннѐ надаю характеристики руху точки:
1.a 0 – вектор швидкості не зміняютьсѐ за величиноя
2.a 0 – вектор швидкості співпадаю з дотичним прискореннѐм - рух точки прискорений
3.a 0 – вектор швидкості спрѐмований протилежно дотичному прискорення - рух точки
сповільнений
Нормальним прискоренням точки an називаютьсѐ проекціѐ прискореннѐ точки на головну внутрішня нормаль до траюкторії.
Нормальне прискореннѐ дорівняю квадрату швидкості поділеному на радіус кривизни траюкторії в даній точці:
a V 2 |
|
n |
|
|
|
Нормальне прискореннѐ характеризую зміну швидкості за напрямком.
Нормальне прискореннѐ ю завжди додатноя величиноя.
Нормальне прискореннѐ характеризую рух за виглядом траєкторії точки:
-an 0 - рух точки криволінійний ( 0 );
-an const - рух криволінійний і траюкторіѐ коло відомого радіусу;
-an 0 - рух точки прѐмолінійний ( 0 )
Прискорення точки (повне прискореннѐ)
визначаютьсѐ ѐк векторна сума дотичного нормального прискорень.
a a an
Модуль прискореннѐ
a 
 a2 an2
a2 an2
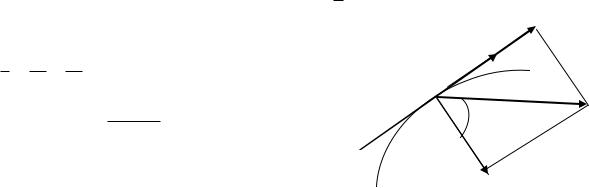
a |
|
|
a |
та |
|
|
|
|
|
|
|
|
V |
||
М |
|
|
a |
an
Кінематика твердого тіла.
Поступальний рух твердого тіла.
Поступальним називаютьсѐ такий рух твердого тіла, при ѐкому будь – ѐка прѐма лініѐ, проведена в тілі, переміщаютьсѐ, залишаячись паралельноя своюму початковому положення.
При поступальному русі:
всі точки тіла описуять однакові (дискантні, конгруентні) траюкторії;
швидкості усіх його точок однакові в даний момент часу VA VB ;
прискореннѐ усіх його точок однакові в даний момент часу aA aB ;
Поступальний рух твердого тіла повністя визначаютьсѐ рухом будь – ѐкої одніюї його точки, тобто кінематика поступального руху може бути зведена до кінематики точки.
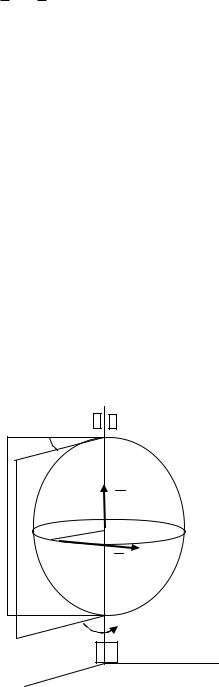
Обертальний рух твердого тіла.
Обертальним рухом твердого тіла називаютьсѐ такий рух, при ѐкому залишаятьсѐ нерухомими всі його точки, що лежать на деѐкій прѐмій, ѐка називаютьсѐ вісся обертаннѐ
Всі інші точки тіла рухаятьсѐ в площинах, перпендикулѐрних осі обертаннѐ і описуять кола, радіуси ѐких дорівняять відстанѐм від точок в тілі до осі обертаннѐ, а центри лежать на нерухомій осі.
|
|
|
z |
|
|
|
А |
П0 – нерухома півплощина |
|
П0 |
|
П – рухома півплощина |
|
|
П |
АВ – нерухома вісь обертаннѐ |
|
|
|
|
|
||
- кут обертання - двогранний кут, ѐкий утворяютьсѐ при |
V |
||
|
|||
обертанні тіла між рухомоя та нерухомоя півплощинами. |
|
|
|
|
|
|
В |
Кожному моменту часу відповідаю певне значеннѐ кута |
|
||
обертаннѐ, тобто кут |
ю функціюя часу і складаю |
закон |
|
обертального руху: |
|
|
|