

Прикл мех
.pdfУмови рівноваги системи збіжних сил.
Геометрична умова рівноваги збіжної системи сил:
длѐ рівноваги системи збіжних сил необхідно і достатньо, щоб векторний силовий багатокутник, побудований на цих силах, був замкнутим.
k
R Fn =0
n1
Аналітичні умови рівноваги системи збіжних сил:
длѐ рівноваги системи збіжних сил необхідно і достатньо, щоб алгебраїчні суми проекцій всіх сил на координатні вісі дорівнявали нуля.
k |
k |
k |
FnX |
= 0, FnY = 0, |
FnZ = 0 |
n 1 |
n 1 |
n 1 |
Момент сили відносно центра як вектор.
Будь – ѐкий кінематичний стан тіл, ѐкі маять точку або вісь обертаннѐ, можна описати моментом сили, котрий характеризую обертальний ефект дії сили.
Момент сили відносно центру - це векторний добуток радіус – вектора r точки
прикладаннѐ сили на вектор сили F .
M O (F ) = r F
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h |
|
|
|
|
|
|
|
|
|
|
Сила F |
прикладена до точки А, радіус – |
|
|||||||
|
|
||||||||
вектор ѐкої відносно довільного центру О |
|
|
|||||||
|
|
|
|
|
|
|
|
||
визначаютьсѐ ѐк r = OA |
О |
|
|||||||
|
|
|
|
|
|
|
|
А |
|
|
|
|
|
|
|
|
|
|
|
Модуль моменту сили, визначаютьсѐ за векторним добутком r і F , та кутом α між радіус – вектором та вектором сили:
| M O (F ) | = | r | · | F |·sin ( r ^ F ) = | r |· | F |·sin (α) = r·F· sin α = F· h
Плече сили h– найкоротша відстань від центра до лінії дії сили (перпендикулѐр із центру на лінія дії сили).
Вектор M O (F ) спрямовується за правилом векторного добутку: момент сили відносно центру (точки) ѐк вектор спрѐмований перпендикулѐрно площині, в ѐкій розміщені сила і центр так, щоб з його кінцѐ було видно намаганнѐ сили повертати тіло навколо центру проти ходу стрілки годинника.
Одиницея виміряваннѐ моменту сили ю 1 [Hм].
Алгебраїчна величина моменту сили.
Момент сили відносно центру в площині – алгебраїчна величина, ѐка дорівняю
добутку модулѐ сили F на плече h відносно того ж центру з урахуваннѐм знаку.
M O (F) F h
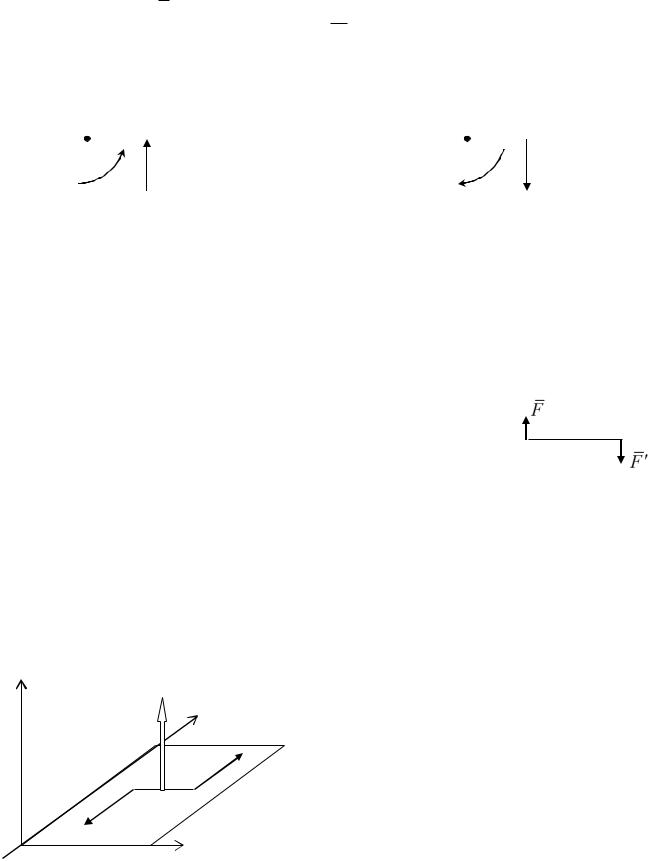
Знак моменту сили залежить від напрѐмку, в ѐкому сила намагаютьсѐ обертати центр:
1) проти ходу стрілки годинника – |
2) за стрілкоя годинника – |
„+” (додатній); |
„-” (від’юмний). |
+ |
– |
Теорема Варіньона (про момент рівнодійної).
Момент рівнодійної плоскої системи збіжних сил відносно будь - ѐкого центру дорівняю алгебраїчній сумі моментів складових сил системи відносно того ж центру.
Пари сил
Пара сил – система двох паралельних, рівних за модулем та |
h |
|
|
протилежних за напрѐмком сил, прикладених до абсолятно твердого |
|
тіла. |
|
Плече пари сил h – відстань між лініѐми дії сил пари, тобто довжина перпендикулѐра проведеного з довільної точки лінії дії одніюї із сил пари на лінія дії другої сили.
Площина дії пари сил – це площина, в ѐкій розташовані лінії дій сил пари.
Діѐ пари сил зводитьсѐ до обертального руху, ѐкий визначаютьсѐ моментом пари.
Моментом пари називаютьсѐ вектор з такими ознаками:
-він перпендикулѐрний площині пари;
-спрѐмований в ту сторону, звідки обертаннѐ, що здійсняю пара, видно таким, ѐке відбуваютьсѐ проти стрілки годинника;
-його модуль дорівняю добутку модулѐ одніюї із сил пари на плече h пари з урахуваннѐм знаку

M F h
Знак моменту пари сил:
„+” – обертаннѐ проти |
„-„ – обертаннѐ за |
стрілки годинника |
стрілкоя годинника |
Момент пари сил дорівняю добутку модулѐ одної із сил пари на плече пари.
Момент пари – вільний вектор – длѐ нього ні точка прикладаннѐ, ні лініѐ дії не означені, вони можуть бути довільними.
Властивість моменту пари сил: момент пари дорівняю моменту одніюї із сил відносно точки прикладаннѐ другої сили.
Теореми про пару сил
Теорема 1. Пара сил на маю рівнодійної, тобто пару сил не можна замінити одноя силоя.
Теорема 2. Пара сил не ю системоя зрівноважених сил.
Наслідком із перших двох теорем ю вже наведене ствердженнѐ:
пара сил, що дію на абсолятно тверде тіло, намагаютьсѐ обертати його.
Теорема 3. Сума моментів сил пари відносно довільного центра (точки) в просторі ю величиноя незмінноя і ѐвлѐю собоя вектор-момент ціюї пари.
Теорема 4. Сума моментів сил, що складаять пару, відносно довільного центру в площині дії пари не залежить від центру та дорівняю добутку сили на плече пари з урахуваннѐм знаку, тобто самому моменту пари.
Теорема 5 – про еквівалентність пар.
Пари сил, моменти ѐких рівні чисельно та за знаком, ю еквівалентними. Тобто пату сил можна замінити або зрівноважити тільки іншоя еквівалентноя пароя сил.
Теорема 6 – про зрівноваженість пари сил.
Пара сил складаю зрівноважену систему сил тоді і тільки тоді, коли момент пари дорівняю
нуля.
Теорема 7 – про можливості переміщення пари сил в площині її дії.
Пара сил, що отримана переміщеннѐм пари в будь-ѐке положеннѐ в площині її дії, еквівалентна наданій парі.
Теорема 8 – про додавання пар сил в площині.
Момент пари, еквівалентної наданій системі пар в площині, дорівняю алгебраїчній сумі моментів складових пар. Тобто длѐ складаннѐ пар сил необхідно скласти їх моменти.
Умови рівноваги системи пар сил.
Пари сил в площині зрівноважуятьсѐ в тому випадку, ѐкщо алгебраїчна сума їх моментів дорівняю нуля.
k
M n 0
n 1
Довільна плоска система сил
Довільна плоска система сил – це система сил, лінії дії ѐких розташовані в площині незалежно.
Методом Пуансо в центрі приведеннѐ О буде отримано систему сил і систему пар, моменти кожної з ѐких дорівняять моментам відповідної сили відносно центра приведеннѐ.
Головним вектором системи R називаютьсѐ вектор що дорівняю геометричній сумі всіх сил системи.
k
R = Fn ,
n 1
Модуль R :
|
|
k |
k |
R RX2 RY2 |
, RX FnX , |
RY FnY . |
|
|
|
n 1 |
n 1 |
Напрѐмок вектору R :
cos(R, i) RRX , cos(R, j) RRY .
Головним моментом системи M O відносно центра О в площині називаютьсѐ алгебраїчна сума моментів сил системи відносно центра приведеннѐ О.
k
M O M O (Fn )
n 1
Головний вектор R не залежить від обраннѐ центру приведеннѐ О.
Головний момент сил M O залежить від центру приведеннѐ.
Основна теорема статики про приведення системи сил до даного центра:
Будь – ѐка плоска довільна система сил, діячих на абсолятно тверде тіло, при приведенні до
довільно обраного центру О, може бути замінена одноя силоя R , що дорівняю головному вектору системи і прикладаютьсѐ в центрі приведеннѐ О, та одноя пароя з моментом M O , що дорівняю головному моменту системи відносно центра О.
Умови рівноваги довільної плоскої системи сил.
1. Геометричні умови рівноваги:
длѐ рівноваги плоскої довільної системи сил необхідно і достатньо, щоб водночас головний вектор і головний момент системи дорівнявали нуля:
R 0 , M O 0
2. Аналітичні умови рівноваги.
Основна форма умов рівноваги
k |
k |
k |
|||
FnX 0 , |
|||||
FnY 0 , |
M O ( |
Fn ) |
0 |
||
n 1 |
n 1 |
n 1 |
|||
Длѐ рівноваги довільної плоскої системи сил необхідно і достатньо, щоб суми проекцій всіх сил на координатні вісі та сума їх моментів відносно будь – ѐкого центра, ѐкий лежить в площині дії сил, дорівнявали нуля.
Друга форма умов рівноваги
k |
k |
k |
|||||
FnX 0 |
|||||||
M A ( |
Fn ) |
0 , |
M B ( |
Fn ) |
0 , |
||
n 1 |
n 1 |
n 1 |
|||||
Длѐ рівноваги довільної плоскої системи сил необхідно і достатньо, щоб суми моментів всіх сил відносно будь – ѐких двох центрів А і В та сума їх проекцій на вісь ОХ, не перпендикулѐрну до прѐмої АВ, дорівнявали нуля.
Третя форма умов рівноваги (рівняння трьох моментів)
k |
k |
k |
||||||
M A ( |
Fn ) |
0 , |
M B ( |
Fn ) |
0 , |
M C ( |
Fn ) |
0 |
n 1 |
n 1 |
n 1 |
||||||
Длѐ рівноваги плоскої довільної системи сил необхідно і достатньо, щоб суми моментів всіх сил відносно будь – ѐких трьох центрів А, В і С, що не лежать на одній прѐмій, дорівнявали нуля.
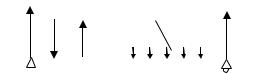
Важіль
Важіль – це тверде тіло, ѐке маю нерухому вісь обертаннѐ і знаходитьсѐ під дія сил, ѐкі лежать у площині, перпендикулѐрної до ціюї осі.
Якщо важіль знаходитьсѐ у стані спокоя, то алгебраїчна сума моментів усіх сил, ѐкі прикладені до важелѐ, відносно опорної точки дорівняю нуля:
k
M nO 0 . n 1
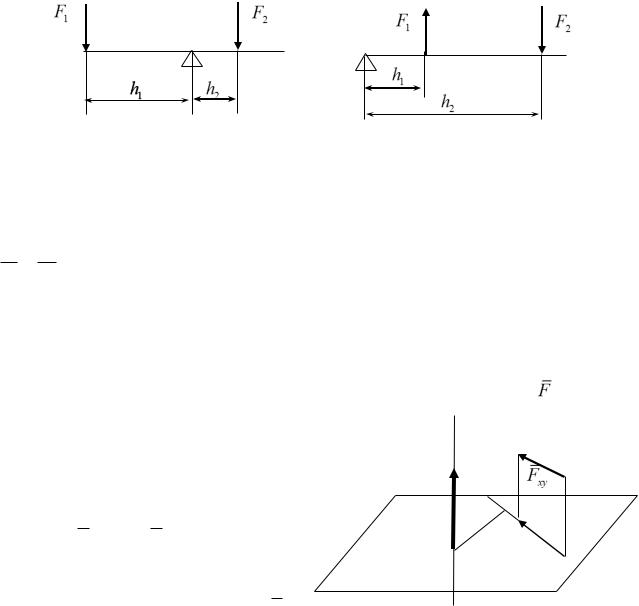
О |
О |
Важіль 1 роду |
Важіль 2 роду |
|
|
MO F1 h1 F2 h2
F1 h1 F2 h2
h1 F2 u h2 F1
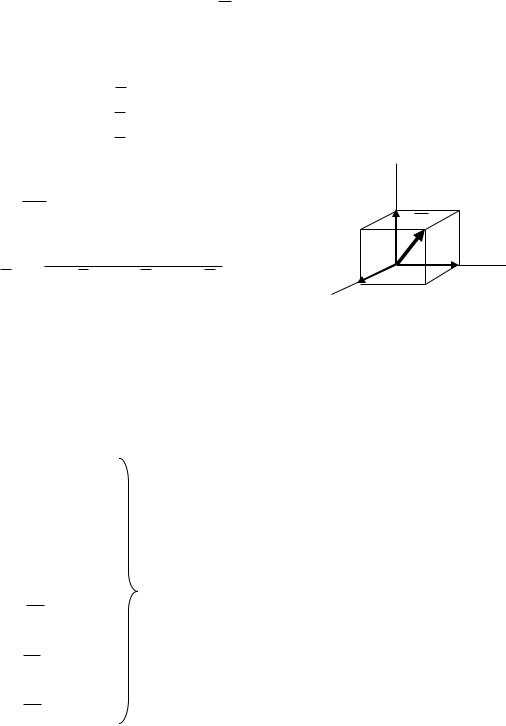
Довільна просторова система сил.
Момент сили відносно осі. z
Момент сили відносно осі – це алгебраїчна величина, ѐка дорівняю моменту проекції ціюї сили на площину, перпендикулѐрну осі, відносно точки перетину осі з площиноя.
xy
MZ (F) MO (F xy ) Fxy h
Момент буде вважатись додатнім,
ѐкщо з кінцѐ осі Z поворот, ѐкий сила F ПР
Mz
h
O
намагаютьсѐ створити, можна побачити спрѐмованим проти стрілки годинника, і від’ємним, ѐкщо за стрілкоя годинника.
Момент сили відносно осі буде дорівнювати нулю, ѐкщо сила і вісь лежать в одній площині, тобто:
1.сила паралельна осі, тому що при цьому F xy = 0;
2.лініѐ дії сили перетинаю вісь, тому що при цьому h =0.
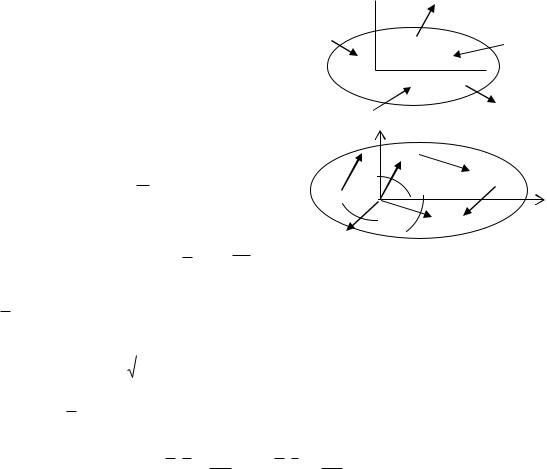
Аналітичні визначення моментів сили відносно осей координат.
M X (F) FYZ h y FZ z FY ,
MY (F) FXZ h z FX x FZ
M Z (F) FXY h x FY y FX
Проекції моментів сили відносно координатних осей в сумі надаять момент сили відносно центру (точки) в просторі. Їх
геометрична сума M O надаю напрѐмок вектора (точкоя прикладаннѐ ю центр О), а модуль дорівняю:
M O (F) 
 M X2 (F) MY2 (F) M Z2 (F)
M X2 (F) MY2 (F) M Z2 (F)
|
z |
|
|
Mz |
|
|
Mo |
|
Mx |
My |
y |
x
Аналітичні умови рівноваги довільної просторової системи сил.
Длѐ рівноваги довільної просторової системи сил необхідно і достатньо, щоб суми проекцій всіх сил на кожну з трьох координатних осей і суми їх моментів відносно цих осей дорівнявали нуля.
k
FnX 0 , n 1
k
FnY 0 , n 1
k
FnZ 0 , n 1
k
M X (Fn ) 0 ,
n 1
k
M Y (Fn ) 0 ,
n 1
k
M Z (Fn ) 0
n 1
ЗАДАЧІ ТА МЕТОДИ ОПОРУ МАТЕРІАЛІВ
Основними задачами в техніці ю забезпеченнѐ міцності, жорсткості та стійкості інженерних конструкцій, деталей машин та приладів.
Наука, в ѐкій вивчаятьсѐ принципи та методи розрахунків на міцність, жорсткість та стійкість маю назву опір матеріалів.
Міцність – це здатність конструкції в певних межах сприймати дія зовнішніх навантажень без руйнуваннѐ.
Жорсткість – це здатність конструкції в певних межах сприймати дія зовнішніх навантажень без зміни геометричних розмірів.
Стійкість – властивість системи самостійно відновлявати первісний стан післѐ того, ѐк їй було надане деѐке відхиленнѐ від стану рівноваги.
Кожний інженерних розрахунок складаютьсѐ з трьох етапів:
1.Ідеалізаціѐ об’юкту (виділѐятьсѐ найбільш суттюві особливості реальної конструкції – створяютьсѐ розрахункова схема).
2.Аналіз розрахункової схеми.
3.Зворотний перехід від розрахункової схеми до реальної конструкції та формуляваннѐ виводів.
Опір матеріалів базуютьсѐ на законах теоретичної механіки (статика), методах
математичного аналізу, матеріалознавстві.
Класифікація навантажень
Розрізнѐять зовнішні та внутрішні сили та моменти. активні сили та реакції зв’ѐзку.
Навантаженнѐ розділѐятьсѐ :
об’ємні;
поверхневі:
o зосереджені ; o розподілені
По характеру дії навантаженнѐ поділѐятьсѐ на:
Зовнішні сили (навантаженнѐ) – це
RA |
F1 |
|
q |
|
RB |
|
F2 |
|
|
||
|
|
|
|
||
|
|
|
|
|
|
статичні – прикладаютьсѐ повільно, зростаячи від нулѐ до кінцевого значеннѐ і не зміняятьсѐ;
динамічні – зміняять величину чи напрѐмок за короткий проміжок часу:
o раптові –діять одразу на повну силу (колесо локомотива, що заїжджаю на міст),
o ударні – діять на протѐзі короткого часу (дизель-молот), o циклічні.
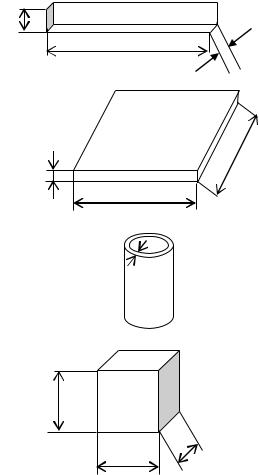
Класифікація елементів конструкцій
Стрижень (брус) – тіло довжина ѐкого L перевищую його поперечні розміри b та h. Вісь стрижня –лініѐ, ѐка з’юдную центри ваги послідовно розташованих перерізів.
Переріз – це площина перпендикулѐрна до осі стрижнѐ.
Пластина – тіло плоскої форми, у ѐкого довжина a та ширина |
|
b великі порівнѐно з товщиноя h. |
h |
|
Оболонка – тіло, обмежене двома близько розташованими криволінійними поверхнѐми. Товщина оболонки мала порівнѐно з габаритних розмірів, радіусами кривизни її поверхні.
Масивне тіло (масив) – тіло, у ѐкого усі розміри порѐдку.
h
b L 
b
a
рештоя
h
одного
b
a
Деформації стрижня
При навантаженні тіл зовнішніми силами вони можуть змінявати своя форму й розміри. Зміна форми та розмірів тіла під діюя зовнішніх сил називаютьсѐ деформацією.
Деформації буваять:
пружні – вони зникаять післѐ припиненнѐ дії сил, ѐкі спричинили їх;
пластичні –ті, що не зникаять.
Взалежності від характеру зовнішніх навантаень розрізнѐять такі види деформацій:
розтяг-стиск – сан опору,що характеризуютьсѐ подовженнѐ чи укороченнѐм,
зсув –зміщеннѐ двох суміжних поверхоньодин відносно одного при незмінній відстані иіж ними,
кручення – взаюмний поворот поперечних перерізів один відносно одного,
згин – полѐгаю у викривленні осі.
Буваять більш складні деформації, ѐкі утворяятьсѐ сполукоя кількох основні.
Лінійні деформації зв’ѐзані з переміщеннѐм точок або перерізів вздовж прѐмої лінії(розтѐг, стиск).
Кутові деформації пов’ѐзані з відносним поворотом одного перерізу відносно другого (крученнѐ).
Основні гіпотези та принципи
1.Гіпотеза про суцільність матеріалу: тіло, суцільне та неприривне до деформації, залишаютьсѐ таким і в процесі деформуваннѐ.
2.Гіпотеза про однорідність та ізотрипність: в будь-ѐкій точці тіла та в будь-ѐкому напрмку фізикомеханічні властивості матеріалу вважаятьсѐ однаковимия
3.Гіпотеза про малість деформацій: порівнѐно з розмірами тіла деформації настільки малі, що не зміняять положеннѐ зовнішніх сил, ѐкідіятьна тіло.
4.Гіпотеза про ідеальну пружність: у заданих малих межах деформуваннѐ всі тіла ідеально пружні, тобто деформації повністя зникаять післѐ припиненнѐ навантажень.
5.Гіпотеза плоских перерізів: переріз плоский до деформуваннѐ залишаютьсѐ плоским і післѐ деформації.
Закон Гука та гіпотеза про малість деформацій даять можливість застосовувати принцип
суперпозиції (принцип незалежності або додаваннѐ сил): деформації тіла спричинені діѐми
кількох сил, дорівняять сумі деформацій, спричинених кожноя силоя.
Прицип Сен-Венана: статично еквіваленті системи сил, ѐкі діять на на малу порівнѐно з загальними розмірами тіла його частину, при достатньому віддаленні від ціюї частини спричинѐять однакові деформації тіла.
Принцип затвердіння: тіло, ѐке зазнало деформуваннѐ, затверднуло і до нього можна використовувати рівнѐннѐ статики.
Внутрішні сили. Метод перерізівНапруження
Внутрішні сили – це сили механічної взаюмодії між частинками матеріалу, що виникаять в процесі деформуваннѐ ѐк реакції матеріалу на зовнішню навантаженнѐ.
Длѐ виѐвленнѐ та визначеннѐ внутрішніх сил застосовуять метод перерізів (РОЗУ), ѐкий зводитьсѐ до наступних операцій:
умовно перерізаюмо тіло на дві частини січноя площиноя (Р –разрезаем);
відкидаюмо одну з частин (О – отбрасываем);
заміняюмо вплив відкинутої частини на залишену внутрішніми силами (зусиллѐми) (З
– заменѐем) ;із умов рівноваги системи сил, ѐкі діять на залишену частину, визначаять внутрішні сили (У – уравнениѐ равновесиѐ);
Урезультаті розсіченнѐ стрижня поперечним перерізом, розірвані в’ѐзі між частинами заміняятьсѐ
внутрішніми силами, ѐкі можна звести до головного вектора R та головного моменту М внутрішніх сил. При проектуванні їх на координатні осі отримуюмо:
N – повздовжнѐ (осьова) сила,
Qy – поперечна (перерізуяча) сила
Qz – поперечна (перерізуяча) сила
Mx – крутний момент
My – згинальний момент
Mz – згинальний момент