

-
Системы с запаздыванием
Системами с запаздыванием называются системы, структурные схемы которых содержат хотя бы одно звено запаздывания. Это звено характеризуется зависимостью между входной величиной U(t) и выходом x(t) вида
x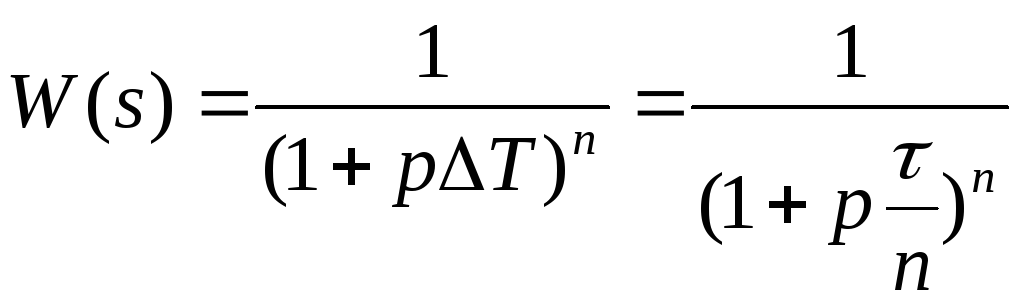 (t)=U(t-),
где: τ является постоянной величиной—
время запаздывания. Система с запаздыванием
может рассматриваться как система,
состоящая из последовательного соединения
большого числа инерционных звеньев с
малыми постоянными времени. Пусть
система состоит из n последовательно
включ равных инерционных звеньев с
постоянным временем ΔT заменим его на
(t)=U(t-),
где: τ является постоянной величиной—
время запаздывания. Система с запаздыванием
может рассматриваться как система,
состоящая из последовательного соединения
большого числа инерционных звеньев с
малыми постоянными времени. Пусть
система состоит из n последовательно
включ равных инерционных звеньев с
постоянным временем ΔT заменим его на
![]() /n.
Тогда перед функция разомкнутой системы
при коэфф. усиления =1 имеет вид:
/n.
Тогда перед функция разомкнутой системы
при коэфф. усиления =1 имеет вид:
Тогда при n ∞ в пределе получим величину W(s)=exp(-sτ) т.е. функция звена с запаздыванием.
Звено с запаздыванием является одним из простейших типов систем с распределенными параметрами.
-
Нелинейные системы, общие понятия, особенности динамики, типовые нелинейности.
Нелинейная САУ – имеет хотя бы одно звено системы описывается нелинейным уравнением. Различают статические и динамические нелинейности. Статические нелинейности представляются в виде статических нелинейных характеристик. Динамические характеристики в виде нелинейных дифференциальных характеристик.
-В нелинейной системе выходная реакция может стремиться к бесконечности на конечном интервале времени
-выходной сигнал при отсутствии входного сигнала не обязательно стремится к нулю.
-возможны устойчивые колебания определенной амплитуды и частоты независимо от начальных условий
- при синусоидальном входном сигнале на выходе могут присутствовать дополнительные гармоники, поэтому частота выходного сигнала кратна частоте входного.
-может наблюдаться скачкообразный резонанс частоты выходного сигнала.
Основные виды нелинейностей
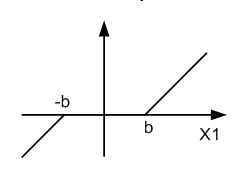
Звено с зоной нечувствительности: при малых изменениях значений входа, выход не меняется.
З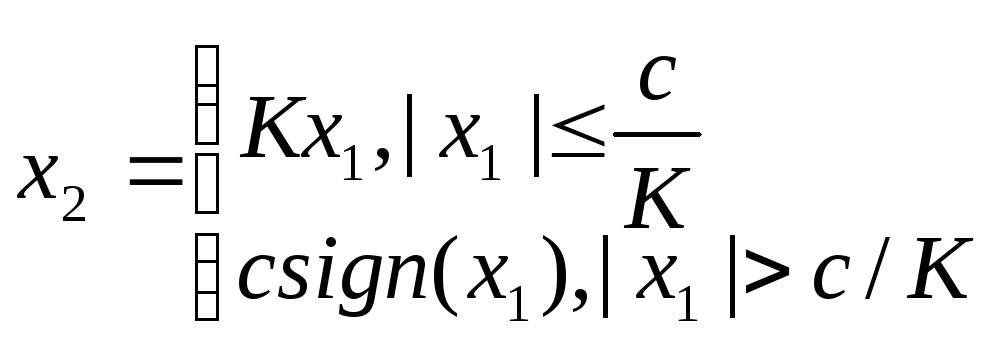 вено
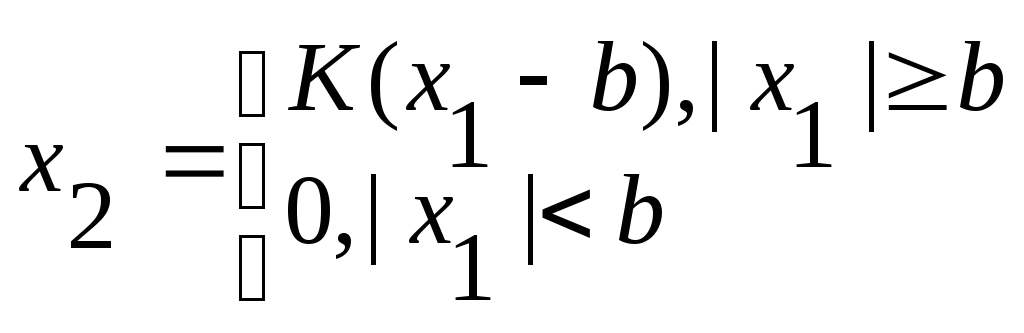
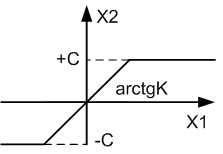
с ограничением: при малых значениях
входа линейно, при больших нет:->
вено
с ограничением: при малых значениях
входа линейно, при больших нет:->
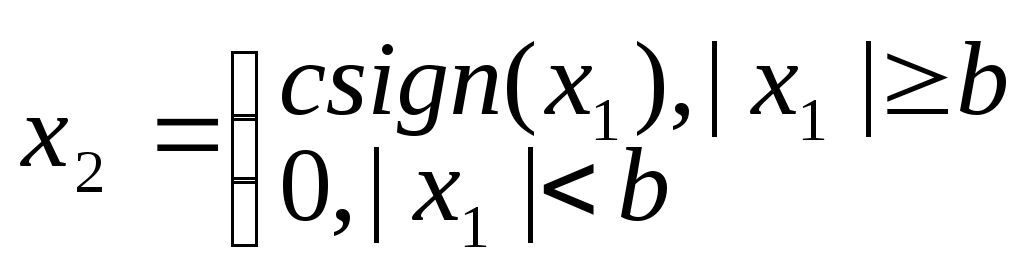
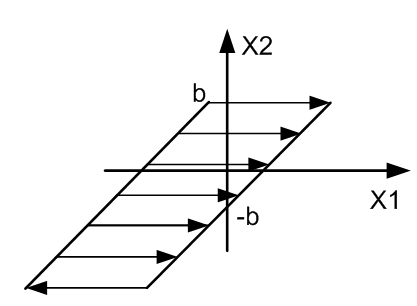
< -Релейная
характеристика
-Релейная
характеристика
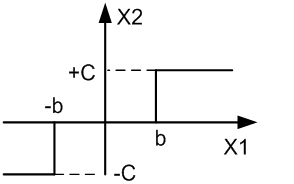
3-х позиционное реле, или реле с зоной нечувствительности:->
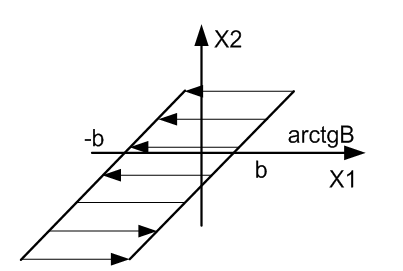
<-Характеристика сухого трения звено типа люфт
Нелинейность типа упор Регулирование противоположно с люфтом:->
-
Метод малых отклонений. Первый метод Ляпунова. Типы особых точек
Составляя уравнения для малых отклонений от состояния равновесия либо установившегося движения, можно исследовать устойчивость данного состояния равновесия (движения). Исследование обычно ведется с помощью устойчивости по Ляпунову и 1-му методу Ляпунову.
Дифференциальное уравнение замкнутой системы 2-го порядка можно преобразовать в систему из 2-ух уравнений 1-го порядка:
Э то
уравнение фазовой траектории интегральной
прямой на фазовой плоскости. Вблизи
начала координат фазовая траектория
(1) раскручивается и стремится к предельному
циклу. Фазовая траектория (2) начинается
вне предельного цикла, может со временем
к нему сходиться, следовательно, система
описываемая (1) – неустойчива относительно
положения равновесия, но при этом всякое
равновесие со временем переходит в
предельный цикл. Если амплитуда
предельного цикла мала, то такое поведение
системы при больших сигналах приемлемо,
т.е. система неустойчива при малых
отклонениях от положения равновесия,
и устойчива при значительных отклонениях.
то
уравнение фазовой траектории интегральной
прямой на фазовой плоскости. Вблизи
начала координат фазовая траектория
(1) раскручивается и стремится к предельному
циклу. Фазовая траектория (2) начинается
вне предельного цикла, может со временем
к нему сходиться, следовательно, система
описываемая (1) – неустойчива относительно
положения равновесия, но при этом всякое
равновесие со временем переходит в
предельный цикл. Если амплитуда
предельного цикла мала, то такое поведение
системы при больших сигналах приемлемо,
т.е. система неустойчива при малых
отклонениях от положения равновесия,
и устойчива при значительных отклонениях.
Ляпунов: если 1-ое приближение системы устойчиво, то и нелинейная система – устойчива.
Типы особых точек: точки равновесия – из них могут исходить многие траектории
|
Центр |
Устойчивый фокус |
Неустойчивый фокус |
Устойчивый узел |
Неустойчивый узел |
Седло |
|
Re(λ1)=Re(λ2)=0, Im(λ)!=0 |
Re(λ)<0 Im(λ)!=0 |
Re(λ)>0 Im(λ)!=0 |
Re(λ)<0 Im(λ)=0 |
Re(λ)>0 Im(λ) =0 |
Re(λ1)>0 Re(λ2)<0, Im(λ) =0 |
Седло всегда неустойчиво.